一种多晶硅套料取样设备的夹持装置的制作方法
1.本实用新型涉及多晶硅套料取样技术领域,更具体地说涉及一种多晶硅套料取样设备的夹持装置。
背景技术:
2.多晶硅,是单质硅的一种形态。熔融的单质硅在过冷条件下凝固时,硅原子以金刚石晶格形态排列成许多晶核,如这些晶核长成晶面取向不同的晶粒,则这些晶粒结合起来,就结晶成多晶硅。
3.多晶硅的套料取样是指:多晶硅在还原生成直径150-200mm硅棒后,为检查其品质,需用专用刀具从硅棒中心处偏约10mm位置套取长150-200直径20mm硅棒。后再进行拉制成直径6mm,长度150 mm的硅芯,由品管对其中成份进行检测,以确定该炉硅棒料品质。
4.现有技术中,多晶硅料品质取样使用量不大,多晶硅料品质套料取样设备主要为小厂制作的非标生产。其存在以下问题:(1)对于硅棒的夹持采用常规的两点夹持,硅棒夹持稳定性不佳,极易造成取样失败。(2)刀具连接采用螺纹对接方式,刀具运转时同心度差最大摆动可达0.15mm,在取样过程中易出现硅棒断裂,硅棒长度不足导致取样失败。
5.例如,现有技术中,公开号为cn201680994u的专利,公开了一种旋转式多晶硅样芯取样钻具。该旋转式多晶硅样芯取样钻具包括摇臂钻床、空心钻柄、空心钻头,所述空心钻柄固定于摇臂钻床的主轴箱的旋转结构的末端,空心钻头与空心钻柄固定连接,所述摇臂钻床的工作平台处设有用于固定多晶硅样棒的固定结构,多晶硅样棒位于空心钻头下方。本实用新型的旋转式多晶硅取样装置能确保安全取样,可以避免多晶硅样棒在高速旋转时碎裂飞溅出来造成人身伤害。并且可满足不同的取样方案,在多晶硅样棒上的平行位置或垂直位置上连续钻取样芯,或在一段多晶硅样棒上连续取样,满足对大直径多晶硅取样检验的国家标准要求。
6.上述专利公开的多晶硅样芯取样钻具,仍然存在上述硅棒夹持和刀具夹持的问题。
技术实现要素:
7.为了克服上述现有技术中存在的缺陷,本实用新型的目的是提供一种多晶硅套料取样设备的夹持装置,以解决上述常规的两点夹持,硅棒夹持稳定性不佳,极易造成取样失败的问题。
8.为了实现以上目的,本实用新型采用的技术方案:
9.一种多晶硅套料取样设备的夹持装置,包括底板、夹持块和夹紧驱动机构;
10.所述夹持块设置有至少三个,包括固定设置在所述底板上的固定夹持块,以及滑动设置在所述底板上的滑动夹持块,所述固定夹持块和滑动夹持块之间形成硅棒夹持空间;
11.所述夹紧驱动机构的输出端与所述滑动夹持块传动连接,带动所述滑动夹持块在
所述底板上运动,调节硅棒夹持空间的大小并对硅棒夹持空间内的硅棒进行夹持。
12.进一步的是,所述夹紧驱动机构为气缸结构,包括筒体、活塞和活塞杆;
13.所述筒体的两端分别设置有第一气管接头和第二气管接头,所述活塞滑动设置在所述筒体内并与所述活塞杆连接,所述活塞杆穿过所述筒体并与所述滑动夹持块连接。
14.进一步的是,所述底板上安装有若干支撑座,所述固定夹持块和夹紧驱动机构分别安装在不同侧的支撑座上。
15.进一步的是,所述滑动夹持块的背部设置有背板,所述背板与所述夹紧驱动机构的输出端连接。
16.进一步的是,所述夹持块设置有四个,包括两个固定夹持块和两个滑动夹持块,所述两个固定夹持块均安装在同一个支撑座上,所述两个滑动夹持块的背部均安装在同一个背板上。
17.进一步的是,四个夹持块呈四角布置。
18.进一步的是,所述夹持块为聚氨酯材质。
19.进一步的是,所述夹持块的上方设置有刀具机构,所述刀具机构包括刀具和对刀具夹持的锥形夹套。
20.进一步的是,所述刀具的底端设置有金钢砂涂层。
21.本实用新型的有益效果:
22.本实用新型提供的多晶硅套料取样设备的夹持装置,夹持块之间形成硅棒夹持空间,在使用时将硅棒竖着放置在硅棒夹持空间内,夹紧驱动机构带动滑动夹持块在底板上运动,调节硅棒夹持空间的大小并对硅棒夹持空间内的硅棒进行夹持,实现对竖直立起硅棒料稳固夹持,进而便于对硅棒进行取样。
附图说明
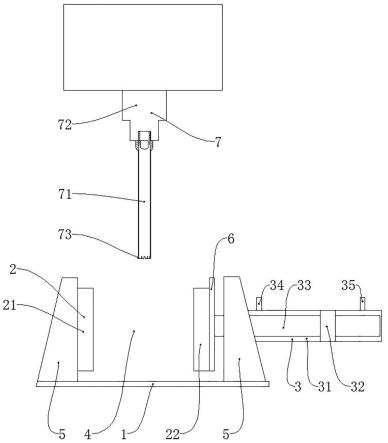
23.图1为本实用新型的示意图;
24.图2为本实用新型底板、夹持块和夹紧驱动机构的俯视图;
25.附图标记:
26.1、底板;2、夹持块;21、固定夹持;22、滑动夹持块;3、夹紧驱动机构;31、筒体;32、活塞;33、活塞杆;34、第一气管接头;35、第二气管接头;4、硅棒夹持空间;5、支撑座;6、背板;7、刀具机构;71、刀具;72、锥形夹套;73、金钢砂涂层。
具体实施方式
27.以下将结合实施例和附图对本实用新型的构思、具体结构及产生的技术效果进行清楚、完整的描述,以充分地理解本实用新型的目的、特征和效果。
28.实施例1
29.一种多晶硅套料取样设备的夹持装置,如图1和2所示,包括底板1、夹持块2和夹紧驱动机构3;
30.夹持块2设置有至少三个,包括固定设置在底板1上的固定夹持块21,以及滑动设置在底板1上的滑动夹持块22,固定夹持块21和滑动夹持块22之间形成硅棒夹持空间4;
31.夹紧驱动机构3的输出端与滑动夹持块22传动连接,带动滑动夹持块22在底板1上
运动,调节硅棒夹持空间4的大小并对硅棒夹持空间4内的硅棒进行夹持。
32.本实施例中,底板1用于安装夹持块2和夹紧驱动机构3,夹持块2用于对硅棒进行夹持,夹紧驱动机构3用于对夹持块2内部的硅棒进行夹紧。夹持块2之间形成硅棒夹持空间4,在使用时将硅棒竖着放置在硅棒夹持空间4内,夹紧驱动机构3带动滑动夹持块22在底板1上运动,调节硅棒夹持空间4的大小并对硅棒夹持空间4内的硅棒进行夹持,实现对竖直立起硅棒料稳固夹持,进而便于对硅棒进行取样。
33.实施例2
34.本实施例在实施例1的基础上作进一步的阐述,如图1-2所示,夹紧驱动机构3为气缸结构,包括筒体31、活塞32和活塞杆33;筒体31的两端分别设置有第一气管接头34和第二气管接头35,活塞32滑动设置在筒体31内并与活塞杆33连接,活塞杆33穿过筒体31并与滑动夹持块22连接。
35.本实施例采用气缸作为直线往复运动机构,推动滑动夹持块22对硅棒夹持空间4内的硅棒进行夹紧。具体的,第一气管接头34和第二气管接头35均连接有气管,气管进气推动活塞32在筒体31内直线往复运动,进而带动活塞杆33直线往复运动,实现滑动夹持块22的直线往复运动,对硅棒夹持空间4内的硅棒进行夹紧或者松开。
36.底板1上安装有若干支撑座5,固定夹持块21和夹紧驱动机构3分别安装在不同侧的支撑座5上,实现对固定夹持块21和夹紧驱动机构3的支撑。
37.滑动夹持块22的背部设置有背板6,背板6与夹紧驱动机构3的输出端连接。夹紧驱动机构3先将直线往复运动传递至背板6,背板6再带动滑动夹持块22做直线往复运动。
38.夹持块2设置有四个,包括两个固定夹持块21和两个滑动夹持块22,两个固定夹持块21均安装在同一个支撑座5上,两个滑动夹持块22的背部均安装在同一个背板6上。四个夹持块2呈四角布置。通过四角布置的夹持块2,两个活动,两个固定,四点夹持,实现对硅棒夹持空间4内硅棒的夹紧与松开。
39.夹持块2为聚氨酯材质,避免金属与硅棒接触发生反应。
40.实施例3
41.本实施例在实施例2的基础上作进一步的阐述,如图1所示,夹持块2的上方设置有刀具机构7,刀具机构7包括刀具71和对刀具夹持的锥形夹套72。
42.本实施例中,底板1、夹持块2、夹紧驱动机构3和刀具机构7均是安装在多晶硅套料取样设备上的,刀具机构7位于底板1、夹持块2、夹紧驱动机构3的上方。刀具机构7连接有带动刀具机构7运行的驱动机构,驱动机构为现有技术中的常规结构。
43.刀具71的作用是用于对硅棒料套取长150-200mm直径20mm硅小棒料。
44.锥形夹套72为现有技术中的mt3a锥形夹套,其为市面通用型号的锥形夹套72。刀具71上设置有与锥形夹套72适配的夹持端。原套料设备上采用主轴下端加工攻母丝并与刀具上公丝连接,此连接方式受螺纹影响会出现一定程度上偏心导至刀具同心度不足。本实施例采用mt3a高精度形夹具锥开口夹套夹持连接,可保证刀具同心度。刀具装拆方便,采用开口夹套方式,拆装刀具时调整程序锁定主轴不让主轴转动,再用月牙板手松开mt3a锥形夹套,可拆下刀具,更换新刀具时只需在mt3a锥形夹套内放刀具并锁紧mt3a锥形夹套就可紧固刀具。
45.刀具71的底端设置有金钢砂涂层73,金钢砂涂层73用作刀具的刀头并于刀具内外
及底端面均匀涂布。
46.为了更好的理解本实用新型,下面对本实用新型的工作原理作一次完整的描述:
47.在使用时,先利用夹紧驱动机构3将硅棒夹持空间4调大,然后将硅棒竖直放置在硅棒夹持空间4内,再利用夹紧驱动机构3对硅棒夹持空间4内的硅棒进行夹紧。
48.具体的,气管进气推动活塞32在筒体31内直线往复运动,进而带动活塞杆33直线往复运动,活塞杆33带动背板6直线往复运动,背板6带动其前端的两个滑动夹持块22直线往复运动,两个滑动夹持块22与两个固定夹持块21配合,对硅棒夹持空间4内硅棒的进行夹紧或者松开。
49.以上对本实用新型的实施方式进行了具体说明,但本实用新型并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可作出种种等同变型或替换,这些等同或替换均包含在本实用新型权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1