一种喷涂机器人光纤检测工具的制作方法
1.本实用新型涉及汽车喷涂技术领域,具体的说,涉及一种喷涂机器人光纤检测工具。
背景技术:
2.雾化器是机器人静电喷涂的核心元件,在其内部安装有空气马达、高压发生器、空气和液体管路以及多个控制阀,将液体涂料充分雾化并加载电荷,最终喷涂到车身表面,并能够精确控制车身喷涂精度。根据工艺标准,车身各个位置的漆膜厚度并不完全相同,这就要求机器人在喷涂到车身不同位置时,雾化器的空气马达要精确输出不同数值的转速,来满足工艺要求。为保证转速的数值精确,目前在机器人静电喷涂领域均采用光纤装置实时监控空气马达的转速,机器人ips喷涂控制系统通过光纤反馈的转速数值,完成对转速的闭环自动控制。
3.当光纤损坏、马达损坏或者雾化器内部原件损坏等情况发生时,均会导致转速超过正常工作限值,触发转速故障报警,造成机器人喷涂系统停止工作。由于导致转速故障的原因较多,目前大多采用逐步排查法,即先从前部雾化器开始一步一步排查到后部机器人本体光纤装置,直到找出故障原因。如果是后部光纤装置损坏,前部的雾化器排查就会浪费大量维修时间。
4.因此能否通过专用工具直接快速检测并判断光纤是否损坏,进而找出转速故障的真正原因,对于减少设备故障停机时间,提高工作效率有着非常重要的意义。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供了一种喷涂机器人光纤检测工具,通过旋转反射盘,使反射盘上的反射区域和非反射区域交替经过光纤,检测光纤是否能反馈转速信号。
6.本实用新型解决技术问题采用如下技术方案:
7.一种喷涂机器人光纤检测工具,包括前盖、后盖、反射盘和转轴;其中,
8.所述前盖和后盖扣合形成容纳腔,所述反射盘设置于容纳腔内;
9.所述前盖具有第一通孔,所述后盖具有第二通孔,所述反射盘具有第三通孔,所述转轴的第一端依次穿过第二通孔、第三通孔和第一通孔,所述转轴的第二端伸出于后盖外部;所述转轴与第一通孔和第二通孔间隙配合,与第三通孔过盈配合;
10.所述反射盘的尺寸使反射盘与容纳腔间隙配合,反射盘能够在容纳腔内转动;所述反射盘朝向前盖的表面设有检测区域,所述检测区域包括交替设置的反射区域和非反射区域;所述前盖设置有朝向检测区域的检测孔,用于插入光纤。
11.进一步的,所述转轴包括反射盘安装部分和轴承安装部分,所述轴承安装部分位于反射盘安装部分的两端,其直径小于反射盘安装部分的直径;所述轴承安装部分均设置有与其相适配的轴承,通过轴承对转轴进行支撑,使转轴转动更灵活。
12.进一步的,所述反射盘安装部分靠近第二端设置有限位盘,所述限位盘的直径大于反射盘安装部分的直径,防止反射盘向第二端窜动。
13.进一步的,两个所述轴承安装部分均设置有卡槽,所述卡槽位于轴承外侧,所述卡槽内设置有卡环,防止轴承和转轴在轴向窜动。
14.进一步的,所述反射区域和非反射区域为圆心角为180
°
的扇形;或者所述反射区域为相对设置的两个扇形,所述非反射区域为相对设置的两个扇形。
15.进一步的,所述容纳腔和反射盘均为圆形,便于反射盘旋转。
16.进一步的,所述检测孔为一个或者多个,所述检测孔的直径与光纤的尺寸相适配。
17.进一步的,所述检测孔包括第一检测孔和第二检测孔,所述第一检测孔的直径为7mm,所述第二检测孔的直径为3mm,可以适用于不同尺寸的光纤。
18.进一步的,所述前盖和后盖分别设置有两个径向相对设置的耳沿,所述前盖的耳沿设置有通孔,所述后盖的耳沿设置有螺纹孔;或者所述前盖的耳沿设置有螺纹孔,所述后盖的耳沿设置有通孔,所述前盖和后盖通过螺栓螺母配合固定,使前盖和后盖连接牢固。
19.进一步的,所述转轴的第二端设置有滚花纹,采用防滑设计,方便手持转轴旋转,便于施力。
20.与现有技术相比,本实用新型的有益效果在于:
21.(1)该检测工具体积精巧,结构紧凑,操作简便。在充分保证安全、准确、高效的前提下,实现了雾化器光纤的快速检测功能。
22.(2)该检测工具可以适用于不同型号的光纤的检测,适用性广,缩短了故障维修时间,大幅提高了工作效率。
附图说明
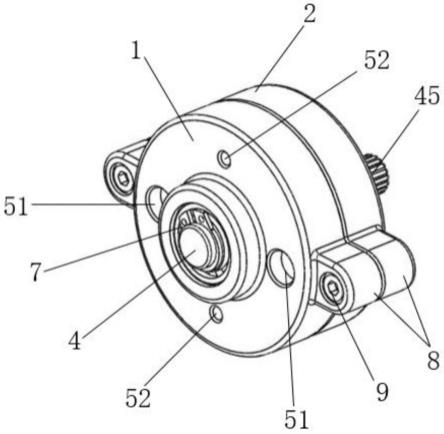
23.图1为本实用新型喷涂机器人光纤检测工具的结构示意图。
24.图2为本实用新型喷涂机器人光纤检测工具的另一方向结构示意图。
25.图3为本实用新型喷涂机器人光纤检测工具的爆炸图。
26.图4为本实用新型喷涂机器人光纤检测工具的剖面图。
27.图5为本实用新型转轴的结构示意图。
28.图6为本实用新型反射盘的一个实施例结构示意图。
29.图7为本实用新型反射盘的另一个实施例结构示意图。
30.图中:1-前盖;11-第一通孔;2-后盖;21-第二通孔;3-反射盘;31-第三通孔;32-反射区域;33-非反射区域;4-转轴;41-反射盘安装部分;42-轴承安装部分;43-限位盘;44-卡槽;45-滚花纹;51-第一检测孔;52-第二检测孔;6-轴承;7-卡环;8-耳沿;9-螺栓;10-螺母;111-光纤。
具体实施方式
31.为使本实用新型的目的、技术方案及优点更加清楚明白,以下参照附图并举实施例,对本实用新型进一步详细说明。
32.在本实用新型的描述中,需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。另外,需要说明的是,术语“内”、“外”等指示的方位或
位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
33.本实用新型提供了一种喷涂机器人光纤检测工具,结合图1-图3所示,包括前盖1、后盖2、反射盘3和转轴4;所述前盖1和后盖2扣合形成容纳腔,所述反射盘3设置于容纳腔内。所述前盖1具有第一通孔11,所述后盖2具有第二通孔21,所述反射盘3具有第三通孔31,所述转轴4的第一端依次穿过第二通孔21、第三通孔31和第一通孔11,所述转轴4的第二端伸出于后盖2外部;所述转轴4与第一通孔11和第二通孔21间隙配合,与第三通孔31过盈配合。所述反射盘3的尺寸使反射盘3与容纳腔间隙配合,使反射盘3能够在容纳腔内转动。所述反射盘3的形状和容纳腔的形状可以为方形、椭圆形等,优选的,所述容纳腔和反射盘3均为圆形,便于反射盘3旋转。
34.所述反射盘3朝向前盖1的表面设有检测区域,所述检测区域包括交替设置的反射区域32和非反射区域33。优选的,可以在反射区域32贴镜面反射膜,使其具有反射光纤111入射光的功能,在非反射区域33贴黑色无光泽膜,使其不具有反射光纤111入射光的功能。所述前盖1设置有朝向检测区域的检测孔,用于插入光纤111。所述检测孔为一个或者多个,所述检测孔的直径与光纤111的尺寸相适配,使光纤111探头可以插入检测孔内。当反射盘3旋转时,所述反射区域32和非反射区域33交替经过检测孔,从而使反射区域32和非反射区域33交替对光纤111的入射光信号进行反馈。如图6所示,作为交替设置的一种实施方式,所述反射区域32和非反射区域33为圆心角为180
°
的扇形。优选的,如图7所示,所述反射区域32为相对设置的两个扇形,所述非反射区域33为相对设置的两个扇形,加工制造简单,而且当反射区域32和非反射区域33交替经过光纤111时,光纤111能够准确反馈反射盘3的转速。
35.具体的,如图5所示,所述转轴4包括反射盘安装部分41和轴承安装部分42,所述轴承安装部分42位于反射盘安装部分41的两端,其直径小于反射盘安装部分41的直径。所述反射盘安装部分41靠近第二端设置有限位盘43,所述限位盘43的直径大于反射盘安装部分41的直径,使反射盘3轴向单侧定位,防止反射盘3向转轴4的第二端方向窜动。所述轴承安装部分42均设置有与其相适配的轴承6,所述转轴4穿过轴承6,与轴承6的内环过渡配合装配,所述第一通孔11和第二通孔21与轴承6的外环过渡配合装配。可以选用nsk6800z深沟球轴承6对转轴4进行支撑,使转轴4旋转更加灵活、轻便、顺滑、无阻力,避免转轴4表面与前盖1和后盖2摩擦。
36.两个所述轴承安装部分42均设置有卡槽44,所述卡槽44位于轴承6外侧,所述卡槽44内设置有卡环7,这样卡环7就能够抵接在轴承6外侧,轴承6的一端通过反射盘安装部分41限位,另一端通过卡环7限位,可以防止轴承6在轴向窜动,同时也能够防止转轴4在轴向窜动。
37.作为一个实施方式,所述检测孔包括第一检测孔51和第二检测孔52,所述第一检测孔51的直径为7mm,所述第二检测孔52的直径为3mm。优选的,为了提高美观性,第一检测孔51和第二检测孔52各设置两个,使四个检测孔沿圆周方向均匀分布,两个第一检测孔51沿径向相对设置,两个第二检测孔52同样的沿径向相对设置。经常使用的光纤111具有四种型号:[2n2214]、[2n2399]、[2n2407]和[2n2416],设置两种尺寸的检测孔就可以实现对该
四种不同尺寸型号的雾化器光纤111的检测,适用性广。
[0038]
作为优选实施方式,所述前盖1和后盖2分别设置有两个径向相对设置的耳沿8,所述前盖1的耳沿8设置有通孔,所述后盖2的耳沿8设置有螺纹孔;或者所述前盖1的耳沿8设置有螺纹孔,所述后盖2的耳沿8设置有通孔,所述前盖1和后盖2通过螺栓9螺母10配合固定。将螺栓9穿过通孔和螺纹孔后,用螺母10紧固,就可以将前盖1和后盖2连接牢固。当然,前盖1和后盖2也可以通过卡扣连接,也可以在前盖1和后盖2的扣合面上直接设置螺纹,通过螺纹配合连接。
[0039]
在机器人发生马达转速故障时,将故障雾化器从机器人上拆卸下来,根据光纤111的型号,将雾化器上安装的光纤111插入前盖1上相对应的检测孔中,光纤111探头朝向检测区域,然后手持第二端转动转轴4,带动反射盘3旋转,如图4所示。为了方便手持,便于施力,可以采用防滑设计,在所述转轴4的第二端设置滚花纹45,优选的,可以采用直线形滚花纹45。为了转动转轴4时更省力,还可以在反射盘3的与检测区域相对的背部开设减重槽,减轻反射盘3的重量。当反射盘3旋转时,反射盘3表面的反射区域32和非反射区域33交替经过光纤111探头。所述前盖1、后盖2、转轴4和轴承6配合,使容纳腔不透光或者轻微透光,降低对光纤111入射光的影响,使检测区域对光纤111入射光的感应灵敏,当反射区域32经过光纤111探头时,反射光纤111的入射光,当非反射区域33经过光纤111探头时,不能反射光纤111的入射光,这样,就产生了脉冲反射光信号,该信号通过光纤111反馈给机器人ips喷涂控制系统。在机器人示教器i/o信号界面,观察是否显示转速值,如果显示转速值,表示光纤111状态正常,光纤111能够反馈转速,如果显示值为0,则可判断光纤111已经损坏,需要立即更换。使用该检测工具可以快速检测雾化器光纤111的功能状态,使用方便,操作简单,缩短了故障维修时间,大幅提高了工作效率。
[0040]
以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1