基于视觉识别技术的产线异物首检装置的制作方法
1.本技术涉及异物检测设备技术领域,尤其是涉及基于视觉识别技术的产线异物首检装置。
背景技术:
2.目前,在工业生产过程中,产线在开线生产前,通常需要对整条产线做人工首检,也就是安排人员在每天首次生产前对整条产线做巡查巡视,主要是检查产线上有无异物,异物种类类似于抹布扳手螺丝刀类工具,主要是前一天晚上停线后检修维护时可能会遗留的一些工具。
3.人工巡检巡视的方法,有以下的一些缺点:
4.1、采用人工首检的方式,对员工的经验和责任心有较强的依赖,有时会出现漏检或者疏忽的情况。
5.2、采用人工首检的方式,人员步行巡视整条产线一周,需要几分钟甚至十几分钟的时间,效率低而且费工时。
6.3、在人员成本越来越高的今天,工厂对于人员使用的额度越来越紧张,更希望用智能机器设备来代替人员操作。
技术实现要素:
7.为了改善上述提到的人工巡检巡视存在的问题,本技术提供基于视觉识别技术的产线异物首检装置。
8.本技术提供基于视觉识别技术的产线异物首检装置,采用如下的技术方案:基于视觉识别技术的产线异物首检装置,包括载台,所述载台的一端固定连接有产线输送机,所述产线输送机的上游部位安装有定位架,所述定位架的中段固定套设有工业视觉相机,所述工业视觉相机的上端设置有报警信号发射器,且产线输送机的两侧均设置有固定夹板,所述固定夹板的一侧设置有杂物出料倾斜滑板,所述杂物出料倾斜滑板远离固定夹板的一端固定连接有储杂箱。
9.基于上述技术方案:本装置采用视觉识别技术,利用工业视觉相机自动拍摄到异物并通过算法将该异物识别出来,并通过报警信号发射器发出报警信号,结构简单,安全可靠,可操作性强,能够在目前的人工首检的场合使用视觉识别方式检测产线异物代替人工首检实现无人自动首检,同时自动完成异物的排除动作,利用储杂箱对异物进行存放,完成整个首检的闭环,和人工首检相比,可以节省人工并且在效果方面优于人工方式,除了检测效果更可靠和更精确之外,检测更稳定不会出现人为的差异和波动,在数字化转型和智能制造的今天,具有更先进的推广意义。
10.作为本实用新型所述基于视觉识别技术的产线异物首检装置的一种优选方案,其中:所述固定夹板远离杂物出料倾斜滑板的一侧开设有容置卡槽,所述容置卡槽的一侧内壁上固设有固定套筒,所述固定套筒的一端设置有定位块,所述定位块的表面转动连接有
旋转盘,所述旋转盘的一端连接有挡物导板,所述挡物导板与产线输送机的表面接触配合。
11.基于上述技术方案:产线下游收到报警信号后,可控制挡物导板从容置卡槽中转出,利用挡物导板对异物进行阻挡并将异物从杂物出料倾斜滑板处排入储杂箱中,实现异物的自动化排除,起到无人巡检无人首检的作用。
12.作为本实用新型所述基于视觉识别技术的产线异物首检装置的一种优选方案,其中:所述容置卡槽的一端固设有正反电机,所述正反电机的输出轴端固定连接有螺纹丝杆,所述螺纹丝杆的外侧通过螺纹滑移连接有滑动式螺套,所述滑动式螺套与容置卡槽滑动卡接配合,且滑动式螺套的一端活动铰接有连杆,所述连杆远离滑动式螺套的一端与挡物导板活动铰接。
13.基于上述技术方案:当启动正反电机后,螺纹丝杆开始转动并使得滑动式螺套向靠近正反电机的方向滑动,此时可利用连杆逐渐撑起挡物导板并使挡物导板从容置卡槽中转出,当首检结束后,可启动正反电机并使螺纹丝杆反方向转动,此时可使挡物导板收纳至容置卡槽中,且不影响产线输送机的正常产品运输使用。
14.作为本实用新型所述基于视觉识别技术的产线异物首检装置的一种优选方案,其中:所述挡物导板的最大旋转角度与杂物出料倾斜滑板的倾斜角度相持平,且挡物导板远离旋转盘的一端与杂物出料倾斜滑板接触配合。
15.基于上述技术方案:当挡物导板从容置卡槽中转出且与杂物出料倾斜滑板的倾斜角度相持平时停止,此时产线输送机上的异物可被挡物导板阻挡,且利用倾斜的挡物导板滑落至杂物出料倾斜滑板中并最终排入储杂箱中,可自动完成异物的排除动作。
16.作为本实用新型所述基于视觉识别技术的产线异物首检装置的一种优选方案,其中:所述载台的外侧固设有plc控制器,所述plc控制器上设置有报警信号接收器,所述报警信号接收器与报警信号发射器无线信号连接。
17.基于上述技术方案:当工业视觉相机自动拍摄到异物并通过算法将该异物识别出来,并通过报警信号发射器发出报警信号后,plc控制器可利用报警信号接收器对此信号进行接收。
18.作为本实用新型所述基于视觉识别技术的产线异物首检装置的一种优选方案,其中:所述plc控制器与正反电机电性连接。
19.基于上述技术方案:当plc控制器接收到报警信号发射器发出的报警信号后,可控制并发送启动信号给正反电机,还能在首检后通过plc控制器控制正反电机反向转动螺纹丝杆并使挡物导板重新收纳至容置卡槽中。
20.综上所述,本实用新型包括以下至少一种有益效果:
21.1.本装置采用视觉识别技术,利用工业视觉相机自动拍摄到异物并通过算法将该异物识别出来,并通过报警信号发射器发出报警信号,结构简单,安全可靠,可操作性强,能够在目前的人工首检的场合使用视觉识别方式检测产线异物代替人工首检实现无人自动首检,同时自动完成异物的排除动作,利用储杂箱对异物进行存放,完成整个首检的闭环,和人工首检相比,可以节省人工并且在效果方面优于人工方式,除了检测效果更可靠和更精确之外,检测更稳定不会出现人为的差异和波动,在数字化转型和智能制造的今天,具有更先进的推广意义;
22.2.当启动正反电机后,螺纹丝杆开始转动并使得滑动式螺套向靠近正反电机的方
向滑动,此时可利用连杆逐渐撑起挡物导板并使挡物导板从容置卡槽中转出,当首检结束后,可启动正反电机并使螺纹丝杆反方向转动,此时可使挡物导板收纳至容置卡槽中,且不影响产线输送机的正常产品运输使用;
23.3.产线下游收到报警信号后,可控制挡物导板从容置卡槽中转出,利用挡物导板对异物进行阻挡并将异物从杂物出料倾斜滑板处排入储杂箱中,实现异物的自动化排除,起到无人巡检无人首检的作用。
附图说明
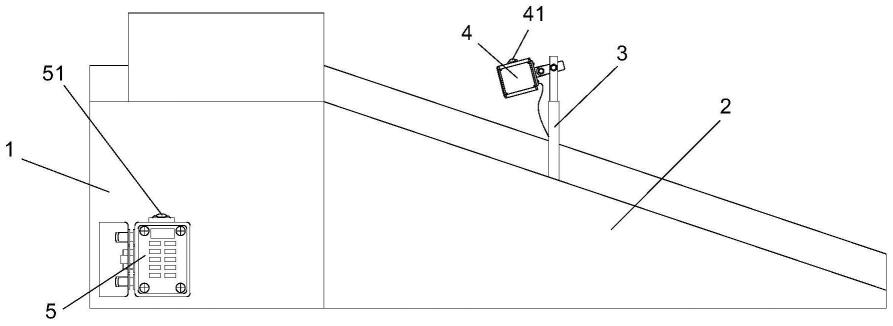
24.图1是本实用新型的整体主视图;
25.图2是本实用新型的俯视图;
26.图3是本实用新型的图2中a处放大图。
27.附图标记说明:
28.1、载台;2、产线输送机;3、定位架;4、工业视觉相机;41、报警信号发射器;5、plc控制器;51、报警信号接收器;6、固定夹板;61、杂物出料倾斜滑板;62、容置卡槽;7、储杂箱;8、正反电机;81、螺纹丝杆;9、固定套筒;10、定位块;11、旋转盘;111、挡物导板;12、滑动式螺套;121、连杆。
具体实施方式
29.以下结合附图1-3对本实用新型作进一步详细说明。
30.请参阅图1-3,本实用新型提供的基于视觉识别技术的产线异物首检装置,包括载台1,载台1的一端固定连接有产线输送机2,产线输送机2的上游部位安装有定位架3,定位架3的中段固定套设有工业视觉相机4,工业视觉相机4的上端设置有报警信号发射器41,利用工业视觉相机4自动拍摄到异物并通过算法将该异物识别出来,并通过报警信号发射器41发出报警信号,且产线输送机2的两侧均设置有固定夹板6,固定夹板6的一侧设置有杂物出料倾斜滑板61,杂物出料倾斜滑板61远离固定夹板6的一端固定连接有储杂箱7,利用储杂箱7对异物进行存放,完成整个首检的闭环,和人工首检相比,可以节省人工,主要的产线异物以抹布、手套、螺丝刀、扳手老虎钳等工具为主,同时还会有瓦楞纸片和塑料片等不规则碎片。
31.固定夹板6远离杂物出料倾斜滑板61的一侧开设有容置卡槽62,容置卡槽62的一侧内壁上固设有固定套筒9,固定套筒9的一端设置有定位块10,定位块10的表面转动连接有旋转盘11,旋转盘11的一端连接有挡物导板111,挡物导板111与产线输送机2的表面接触配合,产线下游收到报警信号后,可控制挡物导板111从容置卡槽62中转出,利用挡物导板111对异物进行阻挡并将异物从杂物出料倾斜滑板61处排入储杂箱7中,实现异物的自动化排除,起到无人巡检无人首检的作用。
32.挡物导板111的最大旋转角度与杂物出料倾斜滑板61的倾斜角度相持平,且挡物导板111远离旋转盘11的一端与杂物出料倾斜滑板61接触配合,当挡物导板111从容置卡槽62中转出且与杂物出料倾斜滑板61的倾斜角度相持平时停止,此时产线输送机2上的异物可被挡物导板111阻挡,且利用倾斜的挡物导板111滑落至杂物出料倾斜滑板61中并最终排入储杂箱7中,可自动完成异物的排除动作。
33.容置卡槽62的一端固设有正反电机8,正反电机8的输出轴端固定连接有螺纹丝杆81,螺纹丝杆81的外侧通过螺纹滑移连接有滑动式螺套12,滑动式螺套12与容置卡槽62滑动卡接配合,且滑动式螺套12的一端活动铰接有连杆121,连杆121远离滑动式螺套12的一端与挡物导板111活动铰接,当启动正反电机8后,螺纹丝杆81开始转动并使得滑动式螺套12向靠近正反电机8的方向滑动,此时可利用连杆121逐渐撑起挡物导板111并使挡物导板111从容置卡槽62中转出,当首检结束后,可启动正反电机8并使螺纹丝杆81反方向转动,此时可使挡物导板111收纳至容置卡槽62中,且不影响产线输送机2的正常产品运输使用。
34.载台1的外侧固设有plc控制器5,plc控制器5上设置有报警信号接收器51,报警信号接收器51与报警信号发射器41无线信号连接,当工业视觉相机4自动拍摄到异物并通过算法将该异物识别出来,并通过报警信号发射器41发出报警信号后,plc控制器5可利用报警信号接收器51对此信号进行接收,plc控制器5与正反电机8电性连接,当plc控制器5接收到报警信号发射器41发出的报警信号后,可控制并发送启动信号给正反电机8,还能在首检后通过plc控制器5控制正反电机8反向转动螺纹丝杆81并使挡物导板111重新收纳至容置卡槽62中。
35.工作原理:在产线正式开线前,产线还没有正式投料的时候,产线已经启动并开始运行,这时的异物会随着产线的运行向产线的下游移动,在经过工业视觉相机4拍摄画面覆盖的区域时,相机自动拍摄到异物并通过算法将该异物识别出来,并发出报警信号,产线下游收到报警信号后,通过plc控制器5启动正反电机8并转出挡物导板111,挡物导板111可将异物切换到杂物出料倾斜滑板61处,并最终排入储杂箱7内,实现异物的自动化排除,起到无人巡检无人首检的作用。
36.以上均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1