一种北斗/GPS高空气象探测设备的制作方法
一种北斗/gps高空气象探测设备
技术领域
1.本实用新型涉及高空气象探测设备技术领域,特别涉及一种北斗/gps高空气象探测设备。
背景技术:
2.高空气象探测是目前大气常规探测最主要手段之一,探测时,雷达跟踪气球携带的探空仪,探空仪以自由升空方式对地球表面到几万米高空的气象要素(气压、温度、湿度)的进行探测,探空仪将探测的气象要素进行处理,然后通过无线方式发射回地面雷达。地面雷达接收到探空仪发回的信号后,进行放大、变频、解调等处理得到空中的气象要素(气压、温度、湿度);再根据雷达的方位角、俯仰角和雷达测得的斜距,可得出探空仪在空中的运行轨迹,即可知空中的风向、风速。但是,通过地面雷达获得的探空仪的位置、轨迹等信息需要复杂昂贵的地面设备支撑,整个系统体积大、重量大、成本高昂。
3.近年来,随着北斗/gps定位技术逐步向民用市场开放,北斗/gps导航模块的应用成本随之降低下来,因此,将高空气象探测设备与北斗/gps导航模块结合起来逐渐具有可行性。
技术实现要素:
4.本实用新型提供了一种北斗/gps高空气象探测设备,其优点是应用北斗/gps导航模块,通过北斗/gps系统进行定位,从而简化地面系统的结构,降低高空气象探测设备的体积、重量以及成本。
5.本实用新型的上述目的是通过以下技术方案实现的,一种北斗/gps高空气象探测设备,其特征在于,包括接收天线、地面接收机、数据处理终端、探空仪基测箱和北斗/gps探空仪,所述接收天线和地面接收机相连,地面接收机和数据处理终端相连;
6.所述接收天线包括六组接收水平方向信号的单元阵子天线、一组接收天顶方向信号的小平板天线和波束控制板,单元阵子天线和过顶天线连接至波束控制板接收端并通过波束控制板进行切换;
7.所述地面接收机包括数据解调模块、频谱监测模块、检测模块以及数据通讯模块;
8.所述探空仪基测箱包括微处理器、第一温度湿度传感器模块、第一压力传感器、显示模块、电源模块以及数据接收单元,温度湿度传感器模块、压力传感器、显示模块、电源模块以及数据接收单元均与微处理器连接;
9.所述北斗/gps探空仪包括第二温度传感器、第二气压传感器、第二湿度传感器、北斗/gps导航模块、数据采集模块、信号编码调制模块、发射机模块、探空仪发射天线和北斗/gps接收天线,数据采集模块接收第二温度传感器、第二气压传感器、第二湿度传感器、北斗/gps导航模块的信号并输出给信号编码调制模块,信号编码调制模块与探空仪发射天线连接。
10.本实用新型进一步设置为,所述单元阵子天线为八木阵子天线,极化方式为垂直
极化。
11.本实用新型进一步设置为,所述小平板天线为微带天线,极化方式为圆极化。
12.本实用新型进一步设置为,单元阵子天线和小平板天线分别连接有一个低噪声放大器电路。
13.本实用新型进一步设置为,波束控制板包括通讯电路、波束切换电路及低噪放大器馈电电路。
14.综上所述,本实用新型的有益效果是:本实用新型中的北斗/gps探空仪搭载北斗/gps导航模块,通过北斗/gps导航模块对北斗/gps探空仪进行定位,获得北斗/gps探空仪三维坐标和三维速度,然后将数据通过发射机模块以及接收天线传输至地面接收机,无需采用测风雷达等复杂的地面设备来获得探空仪的轨迹;本实用新型与传统高空气象探测设备相比,具有体积小,重量轻,信号接收和数据处理自动化,通信频道窄,抗干扰能力强,地面设备简单可靠等技术特点和优势,有利于获得高质量的高空气象数据。
附图说明
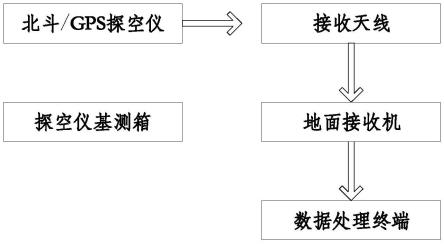
15.图1是本实施例的原理结构示意图;
16.图2是本实施例中接收天线电路示意图;
17.图3是本实施例中低噪声放大器电路图;
18.图4是本实施例中波束控制板电路图;
19.图5是本实施例中地面接收机框图;
20.图6是本实施例中地面接收机原理图;
21.图7是本实施例中探空仪基测箱框图;
22.图8是本实施例中北斗/gps探空仪框图;
23.图9是本实施例中北斗/gps导航模块框图。
具体实施方式
24.下面结合附图详细说明本实用新型的具体实施方式。
25.实施例:如图1所示,一种北斗/gps高空气象探测设备,包括接收天线、地面接收机、数据处理终端、探空仪基测箱和北斗/gps探空仪,所述接收天线和地面接收机相连,地面接收机和数据处理终端相连。
26.如图2所示,所述接收天线包括六组接收水平方向信号的单元阵子天线、一组接收天顶方向信号的小平板天线和波束控制板,小平板天线即为附图2中的过顶天线。所述接收天线用来接收400mhz~406mhz的北斗/gps探空仪信号。单元阵子天线和过顶天线连接至波束控制板接收端并通过波束控制板进行切换,整个接收天线装置安装在一个天线罩内。
27.六组接收水平方向信号的单元阵子天线为八木阵子天线,垂直极化,增益约为5db。
28.接收天顶方向信号的小平板天线为微带天线,圆极化,增益约为7db。
29.单元阵子天线和小平板天线分别连接有一个低噪声放大器电路,波束控制板的输出信号通过滤波器滤波后通过高频电缆输出至地面接收机,低噪声放大器用于抵消滤波器、切换开关、电缆损耗,滤波器抑制带外信号和镜频信号。
30.如图3所示,低噪声放大器电路由低噪声单片放大器1d1 spf5122z及外围电路组成,完成对接收信号的低噪声放大。输入信号经2c1电容耦合到低噪声放大器spf5122z的输入端,由spf5122z放大后,经电容2c2耦合输出,低噪声放大器spf5122z的+5v馈电由波束控制板经电感2l1提供。
31.如图4所示,波束控制板包括通讯电路、波束切换电路及低噪放大器馈电电路。通讯电路中,波束控制板通讯接口为rs422,电路中1d1 max488esa为双路单刀/双掷开关,将接收到的差分信号转换为ttl电平,传输给单片机1d2 pic16f916t-i/so,从而实现波束控制板与终端的通讯。
32.波束切换电路,在波束控制板收到终端的指令需要切换波束时,通过单片机1d2 pic16f916t-i/so发送片选电平给1d3 hmc253q254(sp8t)的h1 h2 h3,通过开关1d3 hmc253q254选择需要的波束与开关1d3的公共输出端接通。
33.低噪声放大器馈电电路,每个单元天线内部安装有低噪声放大器,放大器工作状态称为远程,不工作称为近程。放大器的馈电分别由1d5 1d6 1d7 1d8 四组mx4427功率驱动器提供,在波束控制板收到终端指令,需要切换低噪声放大器的工作状态时(远程或近程),通过单片机1d2pic16f916t-i/so给四组mx4427发功率驱动器送片选指令,给需要工作的低噪声放大器提供馈电。
34.经接收天线接收和低噪声放大器放大的探空仪信号,输入到地面接收机,地面接收机将接收到的探空仪信号解调出数字信号,并送入数据处理终端进行处理,得到温度、湿度、气压、风速、风向气象数据。地面接收机包括数据解调模块、频谱监测模块、检测模块、数据通讯模块等,如图5所示。
35.地面接收机原理图如图6所示,天线接收的探空仪信号通过高频电缆送入地面接收机的射频收发器模块si4432,si4432芯片可用来解调探空信号,采用数字化的解调,芯片内含高性能的adc在接收路径和数字解调器当中做解调、滤波和数据包处理,解调出数据包后发送给数据终端,其根据收到的数据形成各种气象产品。同时通过和arm嵌入式处理器协同工作,完成400~406 mhz频率信号扫描,检测外界的电磁环境,从而避开有干扰的频段完成频谱监测。
36.si4432收发器具有高集成度、低成本、灵活性、外围精简和容易设计等特点,综合起来使得它适合复杂的应用和提供一些强大的功能和特性。si4432连续频率覆盖范围:240mhz~930 mhz,输出功率达到+20dbm(100mw),接收灵敏度达到-21dbm。si4432设计与单片机、晶体和少许被动器件一起工作,从而创建一个低成本高性能系统。
37.d1为arm处理器lpc1752,通过spi接口对d2接收器si4432的控制,解调控制接收天线送来的探空仪的400m发射信号,通过接收器si4432解调出数据包后,再通过d3串口电平转换芯片max3232发送给数据终端,其根据收到的数据形成各种气象产品。
38.探空仪基测箱用于在施放前检查探空仪,通过基测箱可发现和剔除传感器故障的探空仪,保障探测数据的有效性,经过基测箱检查合格的探空仪才可以施放。如图7所示,所述探空仪基测箱包括微处理器、第一温度湿度传感器模块、第一压力传感器、显示模块、电源模块以及数据接收单元,温度湿度传感器模块、压力传感器、显示模块、电源模块以及数据接收单元均与微处理器连接。微处理器为8051系列单片机,第一压力传感器为硅压力传感器。8051单片机系统通过串口方式和第一温度湿度传感器模块通讯读取温度和湿度数
据,通过一个串行外设接口(spi)和硅压力传感器通讯读取压力数据,将采集的温、湿、压数据经过温、湿、压校正模块校正后通过串口发送给接收单元,同时通过显示模块显示出来。
39.如图8所示,所述北斗/gps探空仪包括第二温度传感器、第二气压传感器、第二湿度传感器、北斗/gps导航模块、数据采集模块、信号编码调制模块、发射机模块、探空仪发射天线和北斗/gps接收天线,数据采集模块接收第二温度传感器、第二气压传感器、第二湿度传感器、北斗/gps导航模块的信号并输出给信号编码调制模块,信号编码调制模块与探空仪发射天线连接。第二温度传感器为珠状热敏电阻,第二气压传感器为硅压阻气压传感器,第二湿度传感器为湿敏电容。测量转换电路与第二气压传感器安装在同一电路板上,并置于金属屏蔽盒内。北斗/gps探空仪工作时随气球升空。
40.北斗/gps导航模块框图如图9所示,北斗/gps导航模块可以实现机动载体的实时高精度三维定位、三维测速、精确授时,随着气球升空北斗/gps导航模块以一秒的数据更新率将实时的定位信息通过串口发送给信号编码及调制模块。
41.信号编码及调制模块将单片机从串口接收到的温度、湿度、压力数据和北斗/gps导航模块的定位信息按照约定的方式编码后以数据速率2400bps的gfsk方式调制在400mhz的载波上通过功放模块发射出去。
42.以上所述的仅是本实用新型的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1