一种手机辅料的高速贴附装置的制作方法
1.本实用新型涉及手机制作的技术领域,具体为一种手机辅料的高速贴附装置。
背景技术:
2.在自动化生产行业当中,视觉引导组装定位,应用非常广泛,手机辅料的贴装也不例外,一般都会在组装机械手上安装一套ccd作为机械手的眼睛,引导机械手取料组装,但是这种方式满足不了高速装配的需求,它需要先将 ccd移动到取料位拍照定位,机械手根据视觉软件计算结果在将的取料吸爪移动到取料位取料,这种取料方式会有先定位再取的先后顺序,就造成取料时间相对较长的问题,满足不了高速贴装的需求。
技术实现要素:
3.针对上述问题,本实用新型提供了一种手机辅料的高速贴附装置,其使得取料位拍照的同时,屏幕定位相机同时捕捉到手机屏幕的对应图像,通过同一坐标系换算,快速获取后续辅料贴装位置,手机辅料直接快速贴附,提高了贴附效率。
4.一种手机辅料的高速贴附装置,其特征在于,其包括:
5.底板,所述底板上设置有龙门架;
6.辅料供应装置;
7.辅料定位相机;
8.手机屏幕组件固定平台,其用于固设待贴附辅料的手机屏幕组件,所述手机屏幕组件上标识有辅料贴附区域;
9.多轴贴附机械手,其包括有末端的贴附头;
10.屏幕定位相机;
11.以及取料引导定位相机;
12.所述龙门架的横梁上设置有所述多轴贴附机械手,所述多轴贴附机械手的z轴机械臂的输出端设有贴附头,所述z轴机械臂的一侧通过第一支架固装有所述取料引导定位相机,所述取料引导定位相机捕捉贴附头的取料引导作业图像,所述z轴机械臂的对应侧通过第二支架固装有所述屏幕定位相机;
13.所述辅料供应装置的机座固装于所述底板的上表面,所述辅料供应装置的输出位的正下方设置有辅料定位相机,所述辅料定位相机的镜头朝向上设置,所述辅料定位相机用于捕捉辅料的对应位置;
14.所述手机屏幕组件固定平台固装于所述底板的上表面;
15.所述多轴贴附机械手驱动末端机械臂带动引导定位相机、屏幕定位相机移动作业,所述引导定位相机捕捉到位于输出端的辅料、同时屏幕定位相机捕捉到待贴附辅料的手机屏幕组件的辅料贴附区域。
16.其进一步特征在于:
17.所述多轴贴附机械手具体为四轴机械手,其包括x轴驱动模组、y轴驱动模组、z轴
驱动模组、r轴驱动模组,所述x轴驱动模组固装于所述横梁,所述x轴驱动模组的输出端连接所述y轴驱动模组,所述y轴驱动模组的输出端连接所述z轴驱动模组的z轴机械臂,所述z轴机械臂的输出端设置有r 轴驱动模组,r轴驱动模组的输出端固装有所述贴附头,r轴驱动模组使得在贴附角度需要调整时、进行转动作业。
18.对应于z轴高度位置时,将吸附辅料的z向高度升降值设定为预设值,将贴附辅料的z向升降高度值设定为预设值,使得获得输出端的辅料和手机屏幕组件固定平台上的手机屏幕组件的辅料贴附区域的位置仅需进行x向、y 向计算即可快速准确获取;
19.所述辅料定位相机所拍摄的输出位的面域被预设为工作坐标系的对应平面坐标,所述多轴贴附机械手的初始位置下的贴附头被预设为工作坐标系的对应平面坐标,所述引导定位相机、屏幕定位相机分别预先标定了和贴附头的工作坐标系平面坐标差,通过x模组、y模组的移动准确移动贴附头至取辅料位、贴附辅料的手机屏幕组件的辅料贴附区域。
20.采用本实用新型后,辅料供料装置将辅料送至输出位多轴贴附机械手取料位,待组装辅料的手机屏幕组件固定于手机屏幕组件固定平台,多轴贴附机械手在取料引导定位相机的引导下取辅料,多轴贴附机械手的贴附头移动到辅料定位相机所对应的取相位,此时取料引导相机也刚好拍到辅料供料装置的辅料、且屏幕定位相机拍到手机屏幕组件定位平台上的手机屏幕组件,即屏幕定位相机、辅料定位相机、取料引导定位相机同时拍照取相,并通过后台计算机的软件对图像进行处理,多轴贴附机械手将辅料贴附到手机屏幕组件的指定位置;下一次贴附时,多轴贴附机械手的贴附头可以直接运动到辅料供料装置的输出位上取料,节省了取料引导定位相机的拍照时间,其使得取料位拍照的同时,屏幕定位相机同时捕捉到手机屏幕的对应图像,通过同一坐标系换算,快速获取后续辅料贴装位置,手机辅料直接快速贴附,提高了贴附效率。
附图说明
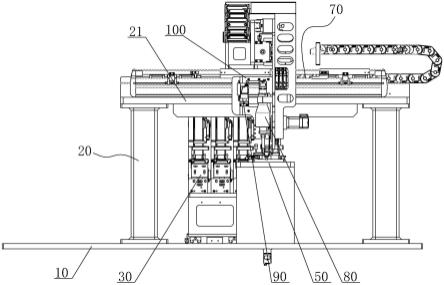
21.图1为本实用新型的主视图;
22.图2为本实用新型的立体图;
23.图3为本实用新型的俯视图;
24.图4为本实用新型的右视图;
25.图中序号所对应的名称如下:
26.底板10、龙门架20、横梁21、辅料供应装置30、辅料定位相机40、手机屏幕组件固定平台50、手机屏幕组件60、多轴贴附机械手70、贴附头71、 x轴驱动模组701、y轴驱动模组702、z轴机械臂703、屏幕定位相机80、取料引导定位相机90、第一支架100、第二支架110。
具体实施方式
27.一种手机辅料的高速贴附装置,见图1-图4,其包括底板10、龙门架20、辅料供应装置30、辅料定位相机40、手机屏幕组件固定平台50、多轴贴附机械手70、屏幕定位相机80、以及取料引导定位相机90;底板10上设置有龙门架20;手机屏幕组件固定平台50用于固设待贴附辅料的手机屏幕组件60,手机屏幕组件60上设置有辅料贴附区域;多轴贴附机械手70包括有末端的贴附头71;龙门架20的横梁21上设置有多轴贴附机械手70,多轴贴附机械手70的z轴机械臂703的输出端设有贴附头71,z轴机械臂703的一侧通过第一支架100固装有
取料引导定位相机90,取料引导定位相机90捕捉贴附头 71的取料引导作业图像,z轴机械臂703的对应侧通过第二支架110固装有屏幕定位相机80;
28.辅料供应装置30的机座固装于底板10的上表面,辅料供应装置30的输出位的正下方设置有辅料定位相机40,辅料定位相机40的镜头朝向上设置,辅料定位相机40用于捕捉辅料的对应位置;
29.手机屏幕组件固定平台50固装于底板10的上表面;
30.多轴贴附机械手70驱动末端机械臂带动引导定位相机90、屏幕定位相机 80移动作业,引导定位相机90捕捉到位于输出位的辅料、同时屏幕定位相机 80捕捉到待贴附辅料的手机屏幕组件60的辅料贴附区域。
31.具体实施例中:多轴贴附机械手70具体为四轴机械手,其包括x轴驱动模组701、y轴驱动模组702、z轴驱动模组、r轴驱动模组(图中被遮挡),x 轴驱动模组701固装于横梁21,x轴驱动模组701的输出端连接y轴驱动模组702,y轴驱动模组702的输出端连接z轴驱动模组的z轴机械臂703,z 轴机械臂703的输出端设置有r轴驱动模组,r轴驱动模组的输出端固装有贴附头71,r轴驱动模组使得在贴附角度需要调整时、进行转动作业。
32.对应于z轴高度位置时,将吸附辅料的z向高度升降值设定为预设值,将贴附辅料的z向升降高度值设定为预设值,使得获得输出端的辅料和手机屏幕组件固定平台50上的手机屏幕组件60的辅料贴附区域的位置仅需进行x 向、y向计算即可快速准确获取;
33.辅料定位相机40所拍摄的输出位的面域被预设为工作坐标系的对应平面坐标,多轴贴附机械手70的初始位置下的贴附头71被预设为工作坐标系的对应平面坐标,引导定位相机90、屏幕定位相机80分别预先标定了和贴附头的工作坐标系平面坐标差,通过x模组、y模组的移动准确移动贴附头71至取辅料位、贴附辅料的手机屏幕组件的辅料贴附区域。
34.其工作原理如下:辅料供料装置将辅料送至输出位多轴贴附机械手取料位,待组装辅料的手机屏幕组件固定于手机屏幕组件固定平台,多轴贴附机械手在取料引导定位相机的引导下取辅料,四轴贴附机械手移动到辅料定位相机所对应的取相位,此时取料引导相机也刚好拍到辅料供料装置的辅料、且屏幕定位相机拍到手机屏幕组件定位平台上的手机屏幕组件,即屏幕定位相机、辅料定位相机、取料引导定位相机同时拍照取相,并通过后台计算机的软件对图像进行处理,多轴贴附机械手将辅料贴附到手机屏幕组件的指定位置;下一次贴附时,多轴贴附机械手的贴附头可以直接运动到辅料供料装置的输出位上取料,节省了取料引导定位相机的拍照时间,其使得取料位拍照的同时,屏幕定位相机同时捕捉到手机屏幕的对应图像,通过同一坐标系换算,快速获取后续辅料贴装位置,手机辅料直接快速贴附,提高了贴附效率。
35.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
36.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当
将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1