一种基于AI和遥感技术的海上船舶异常行为监测装置的制作方法
一种基于ai和遥感技术的海上船舶异常行为监测装置
技术领域
1.本实用新型涉及船舶异常行为监测技术领域,尤其涉及一种基于ai和遥感技术的海上船舶异常行为监测装置。
背景技术:
2.遥感图像是通过各种传感器所获信息的集合,是遥感探测目标的载体。遥感图像中包含大量的关于探测目标的有用信息。特别是海上船舶目标的遥感图像,其可以真实反应船舶目标的形状、几何结构和颜色等特征信息。
3.现有技术cn109558771a公开了一种海上船舶的行为状态识别方法,通过获取多源遥感数据,并对数据进行特征提取,进而识别出船舶的轨迹。但是海上船舶异常行为包括:船舶非正常偏离航道、航向,突然加速、减速,和船舶的倾斜。往往船舶的倾斜会导致更大的事故方式,因此,需要对船舶的异常倾斜进行实时监测和调整,判断该船舶的运动是否符合正常船舶航行活动规律。
4.因此,有必要提供一种海上船舶异常行为监测装置,以解决上述问题。
技术实现要素:
5.本实用新型克服了现有技术的不足,提供一种基于ai和遥感技术的海上船舶异常行为监测装置。
6.为达到上述目的,本实用新型采用的技术方案为:一种基于ai和遥感技术的海上船舶异常行为监测装置,包括:设置在船舶上的ais模块、数据采集组件和接收柱;
7.所述数据采集组件包括:船舶倾斜度测量单元、船速测量单元、船向感应单元和遥感组件;所述船舶倾斜度测量单元包括:设置在所述船舶两侧的主流道,与所述主流道连通的若干浮子,设置在所述船舶上的水平测量单元;
8.相邻所述浮子之间的所述主流道之间设置由阀门,所述主流道两端均设置有进水口,所述主流道的中间位置设置有出水口;相邻所述浮子之间设置有连通管路;
9.所述接收柱用于接收所述ais模块和所述数据采集组件的数据,所述接收柱通信连接终端。
10.本实用新型一个较佳实施例中,沿所述主流道长度方向所述浮子的长度先变长后变短,且所述浮子关于所述主流道长度方向的中垂线对称设置。
11.本实用新型一个较佳实施例中,所述数据采集组件进一步包括:雷达监测水位计,用于监测所述船舶的吃水深度。
12.本实用新型一个较佳实施例中,所述遥感组件为遥感接收器,用于接收遥感图像数据和船舶轨迹。
13.本实用新型一个较佳实施例中,每个所述连通管路中设置有电磁阀门。
14.本实用新型一个较佳实施例中,所述接收柱中设置有监测数据获取模块、数据解析模块和数据处理模块,用于提取所述船舶位置、速度、船舶实时倾斜度以及船舶轨迹的参
数。
15.本实用新型一个较佳实施例中,所述主流道的两端均与所述船舶的外壁螺栓连接,且所述主流道为中空结构。
16.本实用新型一个较佳实施例中,每个所述浮子与所述主流道垂直设置。
17.本实用新型一个较佳实施例中,所述接收柱的表面设置有显示器和报警单元,所述显示器用于输出所述数据处理模块的结果;所述报警单元报警用于提醒船舶上的操作人员船舶存在异常行为。
18.本实用新型一个较佳实施例中,所述主流道的所述进水口处设置有流量计,用于监测所述浮子内部的充水量。
19.本实用新型解决了背景技术中存在的缺陷,本实用新型具备以下有益效果:
20.(1)本实用新型提供了一种海上船舶异常行为监测装置,通过ais模块、数据采集组件提取船舶位置、速度、船舶实时倾斜度以及船舶轨迹的参数,判断该船舶的运动是否符合正常船舶航行活动规律,进而对船舶自身的安全,并对可能发生的危险进行评估和预警。
21.(2)本实用新型船舶实时倾斜度依靠船舶两侧的主流道和浮子中的充水量决定船舶异常倾斜的程度,通过错向调整,使得船舶在发生异常行为后,减缓船舶异常倾斜的时间。其中,当水平测量单元监测到船舶向一侧的前方倾斜时,船舶另一侧后方的主流道的进水口打开,根据船舶倾斜程度的大小,控制不同的水量进入到浮子内部,使得船舶发生异常侧倾时,快速调整船舶两侧浮子的进水量。
附图说明
22.下面结合附图和实施例对本实用新型进一步说明;
23.图1是本实用新型的优选实施例的海上船舶异常行为监测装置的工作原理图;
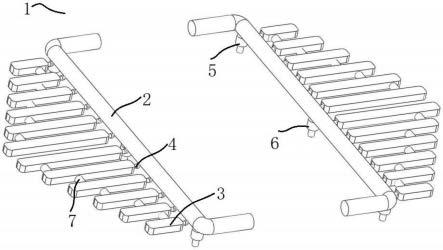
24.图2是本实用新型的优选实施例的船舶倾斜度测量单元的结构示意图;
25.图中:1、船舶倾斜度测量单元;2、主流道;3、浮子;4、阀门;5、进水口;6、出水口;7、连通管路。
具体实施方式
26.现在结合附图和实施例对本实用新型作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
27.本实用新型提供了一种基于ai和遥感技术的海上船舶异常行为监测装置。如图1所示,为该装置的原理图。该船舶异常行为监测装置包括:设置在船舶上的ais模块、数据采集组件和接收柱。
28.本实用新型中数据采集组件包括:船舶倾斜度测量单元1、船速测量单元、船向感应单元和遥感组件。如图2所示,示出了本实用新型中的船舶倾斜度测量单元1的结构示意图。船舶倾斜度测量单元1包括:设置在船舶两侧的主流道2,与主流道2连通的若干浮子3,设置在船舶上的水平测量单元。
29.该主流道2的形状与船舶的外轮廓的形状一致,主流道2两端均设置有进水口5,主流道2的中间位置设置有出水口6。主流道2的两端均与船舶的外壁螺栓连接,该主流道2为
中空结构。主流道2的材料为不锈钢材质。
30.本实用新型中的主流道2从两侧进水后,填充浮子3后,从主流道2中间位置的出水口6出水。本实用新型中进水口5和出水口6处设置有抽水泵或排水泵。
31.本实用新型中相邻浮子3之间的主流道2之间设置由阀门4;相邻浮子3之间设置有连通管路7,每个连通管路7中设置有电磁阀门4。
32.本实用新型中每个浮子3和主流道2之间也设置有阀门4,当开始排水时,此时打开相邻浮子3之间的连通管路7和阀门4,使得水快速排出,便于下一次船舶倾斜的快速调整。
33.沿主流道2长度方向浮子3的长度先变长后变短,且浮子3关于主流道2长度方向的中垂线对称设置。每个浮子3与主流道2垂直设置。
34.需要说明的是,本实用新型中主流道2两侧的浮子3对称设置,便于调整不同方向的船舶倾斜度;沿主流道2长度方向浮子3的长度先变长后变短,使得船舶的异常倾斜调整量是依次递增的,且调整效率更高。
35.本实用新型中浮子3中充水量的多少决定着船舶的倾斜量。其中,主流道2的进水口5处设置有流量计,用于监测浮子3内部的充水量。
36.由于船舶倾斜作为船舶异常行为发生事故最严重的一种,本实用新型中的水平测量单元在监测到船舶前后左右的变化超过预设范围时,当水平测量单元监测到船舶向一侧的前方倾斜时,船舶另一侧后方的主流道2的进水口5打开,根据船舶倾斜程度的大小,控制不同的水量进入到浮子3内部,使得船舶发生异常侧倾时,快速调整船舶两侧浮子3的进水量,进而减缓船舶异常倾斜的时间。
37.本实用新型中接收柱用于接收ais模块和数据采集组件的数据,接收柱通信连接终端。
38.数据采集组件进一步包括:雷达监测水位计,用于监测船舶的吃水深度。
39.遥感组件为遥感接收器,用于接收遥感图像数据和船舶轨迹。
40.该遥感图像数据来自于航道上的桥墩上采集的船舶遥感图像,或卫星遥感图像,通过接收柱对于图像的获取和解析,得到船舶的运行轨迹,进而判断其运行轨迹是否异常。
41.接收柱中设置有监测数据获取模块、数据解析模块和数据处理模块,用于提取船舶位置、速度、船舶实时倾斜度以及船舶轨迹的参数。
42.本实用新型中的接收柱用于接收关于船舶的各种数据,包括船舶位置、速度、船舶实时倾斜度以及船舶轨迹的参数,通过将获得的数据提取解析后,数据处理模块通过将船舶的速度、船舶实时倾斜度以及船舶轨迹的参数作为样本数据,通过将样本数据和数据库中船舶各种参数进行对比,超过阈值即为船舶存在异常行为。
43.本实用新型中的接收柱的表面设置有显示器和报警单元,显示器用于输出数据处理模块的结果;当船舶的速度、船舶实时倾斜度以及船舶轨迹出现异常时,报警单元报警提醒船舶上的操作人员。
44.本实用新型中的接收柱也可以将船舶的数据通信至终端,便于监管部门对指定船舶的管控。
45.本实用新型使用时,船舶上的ais模块、数据采集组件对船舶的船舶位置、速度、船舶实时倾斜度以及遥感图像进行采集;其中,船舶实时倾斜度依靠船舶两侧的主流道2和浮子3中的充水量决定船舶异常倾斜的程度,通过错向调整,使得船舶在发生异常行为后,减
缓船舶异常倾斜的时间。接收柱接收ais模块、数据采集组件的数据后,直接提取船舶位置、速度、船舶实时倾斜度,并在对于图像的获取和解析后,得到船舶的运行轨迹。通过将船舶的速度、船舶实时倾斜度以及船舶轨迹的参数作为样本数据,通过将样本数据和数据库中船舶各种参数进行对比,超过阈值即为船舶存在异常行为。
46.以上依据本实用新型的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1