一种激光雷达检测点设定装置的制作方法
本技术涉及激光雷达扫描测量领域,特别是一种激光雷达检测点设定装置。
背景技术:
1、随着技术的进步和发展,利用激光雷达进行地面扫描被越来越广泛的应用。
2、利用激光雷达对地面进行扫描会获得点云,需要对点云进行处理。但是在对点云进行下一步处理之前,需要检测点云的精度,以确保后续的质量。通常采用的方法是在地面寻找特征点,比如楼房的角点等,作为检测点。选定检测点之后,采用全站仪或者实时动态载波相位差分技术的方法测得该检测点的实际三维坐标。之后再对点云进行查阅,找到离该检测点最近的一个点的三维坐标,与检测点的实际三维坐标进行比较。其差值越大,则表示精度越差;差值越小,则表示精度越高。
3、但是,这种检测精度的方法,存在较大的局限性:在点云中提取检测点坐标时,只能根据点云密度、分布和高度的不同,肉眼识别检测点的位置,检测点提取时不易定位,易产生较大的误差。
技术实现思路
1、本实用新型的发明目的在于:克服现有技术中所存在的点云中提取检测点时不易定位使检测点坐标提取时易产生较大误差,提供一种激光雷达检测点设定装置。
2、为了实现上述目的,本实用新型采用的技术方案为:
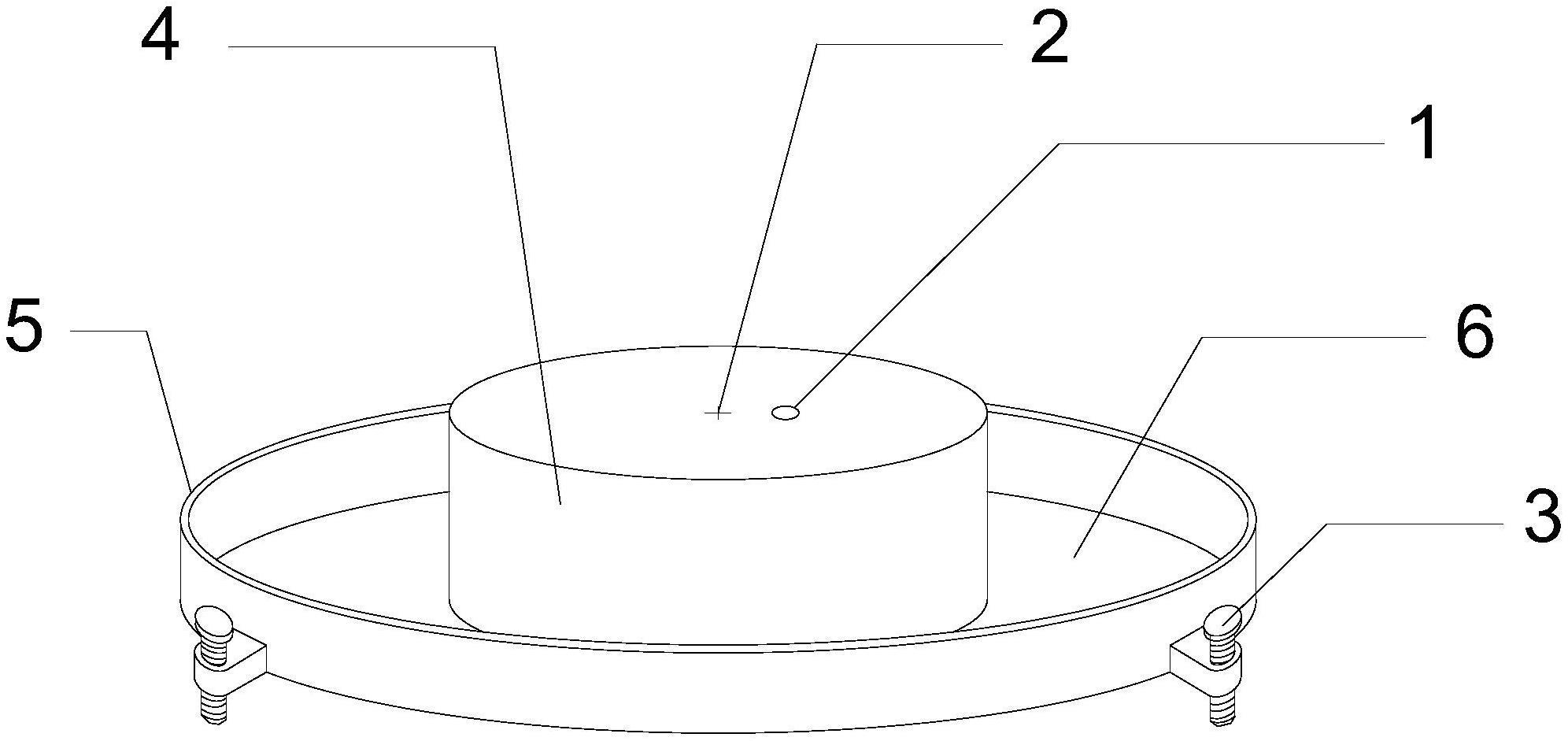
3、一种激光雷达检测点设定装置,包括圆柱体、开口容器和调平装置,圆柱体竖向居中设置于开口容器内部,圆柱体顶面在开口容器顶面之上,调平装置用于调平开口容器,开口容器横截面形状为正多边形或者圆形,圆柱体和开口容器之间有用于盛水的储液区域。
4、激光雷达扫描时将检测点定位在圆柱体顶面,圆柱体和开口容器之间有储液区域用于盛水,由于激光雷达扫描时水面不会产生回波或者回波极少,所以圆柱体顶部有较密集的点云,而储液区域没有点云,相较于现有技术缩小了提取坐标时的搜寻范围,在提取点云坐标时更加容易定位到圆柱体上。调平装置用于调平开口容器,以保证整个激光雷达地面检测点设定装置的整平,能够减少扫描时因激光雷达地面检测点设定装置不处于水平状态所带来的误差。为保证激光扫描时圆柱体的侧面不受影响,故圆柱体顶面在开口容器顶面之上。开口容器的横截面为正的多边形或者圆形,在安装圆柱体时较容易定位在开口容器的中心,易于调平。本激光雷达地面检测点设定装置的材料和尺寸据具体情况而定。
5、采用本激光雷达地面检测点设定装置,在储液区域蓄水,在激光雷达扫描时因为水面不会产生回波或者回波极少,所以圆柱体顶部有较密集的点云,同时储液区域没有点云,可使得激光雷达在扫描时相较于现有技术缩小了提取坐标时的搜寻范围,在提取点云坐标时检测点将范围缩小到圆柱体顶面,使得检测点更易定位,尽可能减少了因为错误定位带来的精度判断的误差。
6、优选地,开口容器的横截面形状为圆形。
7、开口容器横截面形状设为圆形,保证开口容器与圆柱体之间的间距处处相等,同时圆形也保证在设置调平装置时更加便捷,也更加易于调平。
8、优选地,调平装置包括调平螺栓。
9、调平螺栓的数量和分布情况据具体情况而定。调平螺栓能够使得在调平本激光雷达地面检测点设定装置时,调节更加细微,且因为螺栓上的螺纹调平后也定位稳定,使得调平简化。
10、优选地,调平螺栓至少有3颗。
11、3颗调平螺栓是使得开口容器保持平衡的最少的量,且3颗调平螺栓相较于多颗调平螺栓更易调平。
12、优选地,所述调平装置在所述开口容器外侧面的下方。
13、调平装置在所述开口容器外侧面的下方,便于去操作调平。
14、优选地,圆柱体顶面设有水准器,水准器顶面与圆柱体顶面齐平。
15、水准器内部有水准气泡,可较为直观的判断整个激光雷达地面检测点设定装置是否处于平衡状态,平衡状态便于激光雷达直观且准确扫描出圆柱体的顶面,减少误差。
16、优选地,圆柱体顶部圆心有十字丝形状的定位点。
17、激光雷达扫描时,将检测点定位在定位点处。检测点采用十字丝的形态,标志检测点时更加明显,因此提取检测点的点云坐标也更加容易。另外该装置用于获得检测点的实测坐标时,十字丝也会使得在实际测量检测点时定位更加明确。
18、一种检测点的坐标提取方法,采用上述的一种激光雷达检测点设定装置,包括以下步骤:
19、s1、划定区域:在开口容器周围划定一片预设区域,预设区域完全覆盖开口容器;
20、s2、划分单元格:将预设区域划分为若干个单元格,单元格为正多边形形状,单元格边长d为:
21、
22、式中lb代表圆柱体的圆心到开口容器边长的垂线的最小值或是开口容器的半径,ra代表圆柱体的半径,n为常数,根据单元格的形状确定n的取值,常数n的选取能使储液区域划分出1或2个单元格;
23、s3、确定检测点的初步点云坐标
24、在区域设定笛卡尔直角坐标系并以竖直方向为z轴,以单元格中内部点云个数为0的作为第一单元格并提取第一单元格的中心平面坐标,取第一单元格x轴方向坐标值的最大值与最小值的平均值为再取第一单元格y轴方向坐标值的最大值与最小值的平均值为由此确定检测点的初步点云坐标
25、s4、确定位于圆柱体上的坐标集合(xk,yk,zk):
26、计算区域内部各点到检测点的初步点云坐标的水平距离rj,由rj确定位于圆柱体上的坐标集合(xk,yk,zk);
27、s5、确定检测点的点云坐标(x0,y0,z0):
28、先提取出圆柱体的侧面的坐标点集合(xh,yh,zh),再据圆的解析式和最小二乘原理求出检测点的平面点云坐标(x0,y0),之后再据圆柱体上的点距检测点的平面点云坐标(x0,y0)的距离得出圆柱体的顶面的坐标集合(xv,yv,zv),最后再据圆柱体的顶面的坐标集合求出检测点的z轴坐标z0,最后确定检测点的点云坐标(x0,y0,z0)。
29、激光雷达进行扫描时,将圆柱体的顶面的圆心设为检测点。确定检测点的点云坐标(x0,y0,z0)后与检测点的实测坐标进行比较,进行激光雷达扫描精度的判断。
30、保证开口容器位于划定的区域内部,即保证整个激光雷达地面检测点设定装置都位于划定的区域的内部。
31、确定单元格大小计算式中的常数n据该激光雷达地面检测点设定装置的尺寸而定。单元格不能将整个预设区域铺满时,剩余边缘部分直接舍去。
32、本圆心坐标提取方法中所使用的坐标轴为笛卡尔直角坐标系,确定竖直方向为z轴,x轴和y轴方向据具体情况而定。
33、采用该检测点的坐标提取方法,相较于直接在点云中提取出检测点坐标而言更加节省时间。另外,由于点云具有分辨率,激光雷达扫描时并不保证检测点上有点云,则只能提取最近的点云的坐标。通过采用该检测点的坐标提取方法,有效减少了因为点云分辨率造成的误差,检测点的坐标提取更精确,对于激光雷达的精度评判的影响也更加小。
34、优选地,在步骤s1中,以检测点的实测坐标(x1,y1,z1)为中心划定预设区域。
35、检测点的实测坐标(x1,y1,z1)是采用全站仪或者实时动态载波相位差分技术的方法测得的。以检测点的实测坐标(x1,y1,z1)为中心,可尽量保证该激光雷达地面检测点设定装置靠近划定的区域范围的中心处,尽可能保证该激光雷达地面检测点设定装置在划定的区域范围之内,以此保证点云坐标提取时的精确度。
36、优选地,单元格为方格,方格的边长为:
37、
38、式中lb代表圆柱体的圆心到开口容器边长的垂线的最小值或是开口容器的半径,ra代表圆柱体的半径。
39、常数n选择3,使得圆柱体和开口容器之间的储液区域的方格数量为1个或2个,保证检测点的初步点云坐标不会偏移得太多,以此保证最后计算出检测点的点云坐标(x0,y0,z0)误差不会太大,减少精度判断的误差。
40、采用方格,不仅能保证将整个激光雷达地面检测点设定装置都被铺满,同时也可相对而言更易确定中心点的坐标。加快圆心坐标提取的速度同时保证圆心坐标提取的精确度,减少精度判断的误差。
41、优选地,确定位于圆柱体上的坐标集合(xk,yk,zk)时,区域内部各点到初步点云坐标的水平距离rj需满足如下公式:
42、rj<ra+d
43、式中ra代表圆柱体的半径,d代表单元格边长。
44、通过使得ra+d,适当扩大了位于圆柱体上的范围,尽可能保证每个位于圆柱体上的方格都被包括在内,保证圆柱体的侧面坐标都被提取在内,则在之后的圆的解析式计算过程中能够尽可能保证x0和y0的计算结果的精确,尽可能保证点云坐标(x0,y0,z0)的精确。
45、优选地,步骤s5包含如下步骤:
46、s51、提取出圆柱体的侧面的坐标点集合(xh,yh,zh):从圆柱体上的坐标集合(xk,yk,zk)提取出圆柱体的侧面的坐标点集合(xh,yh,zh),判断的标准如下:
47、zh<zmax-m
48、式中zh为圆柱体上的z坐标值,zmax为圆柱体上的z坐标值的最大值,m为误差剔除数,误差剔除数m据激光雷达检测点设定装置尺寸而定,通过此提取出圆柱体的侧面的坐标点集合(xh,yh,zh);
49、s52、确定检测点的平面点云坐标(x0,y0):
50、圆柱体顶面的圆的解析式为:
51、
52、通过最小二乘法计算出x0、y0,确定检测点的平面点云坐标(x0,y0);
53、s53、确定圆柱体的顶面的坐标点集合(xv,yv,zv):计算圆柱体上的点的集合到(x0,y0)的水平距离rk:
54、
55、式中xk为圆柱体上的x坐标值,yk为圆柱体上的y坐标值;
56、位于圆柱体的顶面的坐标点判断公式如下:
57、rk<ra-m
58、通过此式确定圆柱体的顶面的坐标点集合(xv,yv,zv);
59、s54、确定检测点的点云坐标(x0,y0,z0):z0通过下式求出:
60、
61、式中p为圆柱体的顶面的点的数量,zv为圆柱体的顶面的坐标点的z坐标,通过此式最后可以确定检测点的点云坐标(x0,y0,z0)。
62、误差剔除数m的取值据该激光雷达地面检测点设定装置的尺寸而确定。本圆心坐标提取方法设定误差剔除数m可以尽可能保证(xh,yh,zh)在圆柱体的侧面和(xv,yv,zv)在圆柱体的顶面。z0取值通过圆柱体的顶面上所有坐标的z值平均值确定,可以尽可能减小z0的误差,保证检测点点云坐标的精确度。
63、综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
64、1.采用上述激光雷达检测点设定装置,在激光雷达扫描时圆柱体侧面不会受影响,在储液区域盛水,可使得激光雷达在扫描时相较于现有技术缩小了提取坐标时的搜寻范围,在提取点云坐标时检测点更容易定位,尽可能减小了因错误定位带来的精度判断的误差;
65、2.采用上述检测点的坐标提取方法,相较于直接在点云中提取出检测点坐标而言更加节省时间,另外,由于点云具有分辨率,激光雷达扫描时并不保证检测点上有点云,则只能提取最近的点云的坐标,通过采用该圆心坐标提取方法,有效减少了因为点云分辨率造成的误差,检测点的坐标提取更精确,对于激光雷达的精度评判的影响也更加小。
- 还没有人留言评论。精彩留言会获得点赞!