一种供水管网弯曲管道监测机器人的制作方法
1.本实用新型涉及管道机器人领域,尤其涉及一种供水管网弯曲管道监测机器人。
背景技术:
2.在供水管网施工前,需对施工现场的原始市政管线(如原始供水管道、污水管和天然气管等)进行勘察,以确定原始市政管线的走向,并根据原始市政管线的走向设计供水管道的回避方案,供水管道一般通过在横向或竖向上安装球墨管件形成拐角,以实现供水管道顺利埋设的目的。
3.目前主要依靠现场施工员手绘和表格统计工程中所使用的球墨管件,施工员难以完全实时记录施工过程中的各类变更和调整,难免会在统计过程中出现疏漏。并且,当供水管道的沟槽回填隐蔽后,便无法再次观察到供水管道的球墨管件数量情况,更加难以再统计和核对已使用的球墨管件。最后,施工所用球墨管件数量与材料员出仓数据统计往往产生出入,在工程的实际对接过程中,供水管道的变更、调整和汇总往往都是延后的,往往会造成球墨管件的数量信息的遗失,导致球墨管件使用的少报、漏报,影响最后的成本核算与统计。
技术实现要素:
4.针对上述问题,本实用新型提出一种供水管网弯曲管道监测机器人,主要解决供水管道的沟槽回填隐蔽后,无法统计弯曲球墨管件实际使用数量的问题。
5.为解决上述技术问题,本实用新型的技术方案如下:
6.一种供水管网弯曲管道监测机器人,包括梭形的弹性外壳,以及固定在所述弹性外壳内部的计数模块,所述弹性外壳的最大径向宽度比供水管道的内径宽度小15%,所述弹性外壳的轴向长度比球墨管件的中心弧线长度小15%,所述计数模块包括姿态传感器、运算单元、存储器和显示单元,其中,所述姿态传感器用于检测自身的俯仰角和偏航角;所述运算单元用于判断所述俯仰角和所述偏航角中任意一个是否超过预设阈值,若是则输出触发信号;所述存储器用于接收所述触发信号,并对所述触发信号进行累计,生成累计值;所述显示单元用于显示所述累计值。
7.在一些实施方式中,所述弹性外壳为透明材料。
8.在一些实施方式中,所述弹性外壳的内壁镜像设置有两块支撑板,所述计数模块安装在两块所述支撑板之间。
9.在一些实施方式中,所述计数模块可拆卸安装在两块所述支撑板之间。
10.在一些实施方式中,所述弹性外壳由两个镜像对称设置的子外壳通过键配合连接而成。
11.在一些实施方式中,两个所述子外壳的螺纹连接部设置有橡胶防水密封圈。
12.在一些实施方式中,所述姿态传感器为mpu6050姿态传感器。
13.在一些实施方式中,所述运算单元为arduino单片机。
14.在一些实施方式中,所述显示单元为液晶显示器。
15.本实用新型的有益效果为:通过设置一个梭形的弹性外壳来适配供水管道和球墨管件的尺寸,并在弹性外壳的内部设置计数模块,用于计算弹性外壳的转弯次数。在使用时,将本机器人放在供水管道的入口,然后在供水管道入口输入正压水流,因此本机器人在跟随水流运动的过程中,姿态传感器能够获取超过预设阈值的俯仰角和偏航角,运算单元输出一次触发信号则认定本机器人当前经过一个球墨管件,过程中,存储器根据触发信号生成累计值,最终在供水管道出口处回收机器人,显示单元显示的累计值即表示球墨管件的数量,该数值可以作为施工末期的成本核算与统计,在供水管道的沟槽回填隐蔽后,还能够再次统计球墨管件使用数量。
附图说明
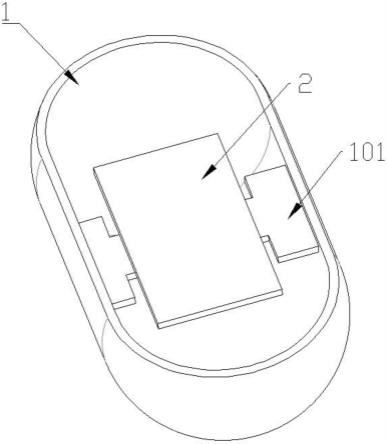
16.图1为本实用新型实施例公开的供水管网弯曲管道监测机器人的剖切图;
17.图2为本实用新型实施例公开的计数模块的结构示意图;
18.其中:1-弹性外壳,2-计数模块,101-支撑板,201-姿态传感器,202-运算单元,203
‑ꢀ
存储器,204-显示单元。
具体实施方式
19.为使本实用新型的目的、技术方案及优点更加清楚、明确,下面结合附图和具体实施方式对本实用新型的内容做进一步详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部内容。
20.本实施例提出了一种供水管网弯曲管道监测机器人,如图1、2所示,包括梭形的弹性外壳1,以及固定在弹性外壳1内部的计数模块2,弹性外壳1的最大径向宽度比供水管道的内径宽度小15%,弹性外壳1的轴向长度比球墨管件的中心弧线长度小15%,保证弹性外壳1能在供水管道和球墨管件内顺利向前运动和转弯,再者,弹性外壳1本身具备的弹性属性,也保证其能够不会堵塞在球墨管件处,计数模块2包括姿态传感器201、运算单元202、存储器203 和显示单元204,其中,
21.姿态传感器201用于检测自身的俯仰角和偏航角,俯仰角和偏航角分别代表姿态传感器201在坐标系中横向偏转和纵向偏转,表示弹性外壳1是否发生横向偏转和纵向偏转;
22.运算单元202用于判断俯仰角和偏航角中任意一个是否超过预设阈值,若是则输出触发信号,该预设阈值设置为80-90
°
,优选82
°
,若俯仰角和偏航角中任意一个超过预设阈值,则输出一次触发信号,表示弹性外壳1当前经过一个球墨管件;
23.存储器203用于接收触发信号,并对触发信号进行累计,生成累计值;
24.显示单元204用于显示累计值。
25.可选的,弹性外壳1为透明材料,如pp或者pc材料,技术人员可直接透过弹性外壳1 观察到显示单元204上的累计值。
26.在本实施例中,通过设置一个梭形的弹性外壳1来适配供水管道和球墨管件的尺寸,并在弹性外壳1的内部设置计数模块2,用于计算弹性外壳1的转弯次数。在使用时,将本
机器人放在供水管道的入口,然后在供水管道入口输入正压水流,因此本机器人在跟随水流运动的过程中,姿态传感器201能够获取超过预设阈值的俯仰角和偏航角,运算单元202输出一次触发信号则认定本机器人当前经过一个球墨管件,过程中,存储器203根据触发信号生成累计值,最终在供水管道出口处回收机器人,显示单元204显示的累计值即表示球墨管件的数量,该数值可以作为施工末期的成本核算与统计,在供水管道的沟槽回填隐蔽后,还能够再次统计球墨管件使用数量。
27.需要注意的是,由于本机器人需要获取的数据是球墨管件的数量,同时由于球墨管件需要横向或竖向安装形成拐角,故本机器人的滚动角不纳入计算范畴,即弹性外壳1沿自身轴向的旋转不纳入计算范畴。
28.可选的,弹性外壳1的内壁镜像设置有两块支撑板101,计数模块2安装在两块支撑板101 之间,支撑板101也具有一定的弹性,避免计数模块2直接受到供水管道和球墨管件的挤压而遭到损坏。弹性外壳1的总体直径尺寸适合内径大于100mm管道内工作,调整其支撑板101 的尺寸可使得本机器人适配不同管径的供水管道和球墨管件。更优的,计数模块2可拆卸安装在两块支撑板101之间,当应用场景发生变化,则可将计数模块2从弹性外壳1内拆卸下来,并安装到新的弹性外壳1内,以适配不同管径的供水管道和球墨管件。
29.可选的,弹性外壳1由两个镜像对称设置的子外壳(图中未示)通过键配合连接而成,方便计数模块2的安装及拆卸。更优的,两个子外壳的螺纹连接部设置有橡胶防水密封圈,增强弹性外壳1的防水性能,保证计数模块2不受液体的侵蚀而短路。
30.可选的,姿态传感器201为mpu6050姿态传感器。mpu6050姿态传感器是6轴运动处理传感器,它集成了3轴mems陀螺仪,3轴mems加速度计,以及一个可扩展的数字运动处理器dmp。在本实施例中,仅使用mpu6050姿态传感器获取俯仰角和偏航角。
31.可选的,运算单元202为arduino单片机,也可选择其他的单片机平台,能够实现上述的运算功能即可,在本实施例中,arduino单片机已包含存储器,因此无需外接存储器203。
32.可选的,显示单元204为液晶显示器,也可以选择oled或者数码管等显示装置。
33.上述实施例只是为了说明本实用新型的技术构思及特点,其目的是在于让本领域内的普通技术人员能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡是根据本实用新型内容的实质所做出的等效的变化或修饰,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1