一种机器人小臂总成NVH测试台的制作方法
一种机器人小臂总成nvh测试台
技术领域
1.本实用新型属于机器人装配技术领域,具体地说涉及一种机器人小臂总成nvh测试台。
背景技术:
2.nvh测试是指噪声、振动与声振粗糙度测试,常用于汽车检测,可以有效降低车辆故障率,提高使用寿命,但是在机器人领域使用较少。
3.在传统的机器人测试磨合工作中,一般采用整机装配后,全部接线完毕,再对整机进行测试磨合,待测试磨合阶段发现问题后,再对整机进行拆解分析原因进而解决问题,效率较低。且对于整机的拆解工作,对其他没问题的结构拆解后有一定的影响,容易降低其使用寿命。尤其是某些可进行多轴运动的传动的机器人小臂总成,由于一般为轴体型,往往有多层且同轴的齿轮传动结构,采用传统测试方法一层层单独拆解测试更加麻烦;而目前可以对机器人小臂总成进行nvh测试的测试台还比较少。
技术实现要素:
4.针对现有技术的机器人测试磨合较为繁琐,不易对机器人小臂单独进行nvh测试的问题,现提出一种机器人小臂总成nvh测试台。本实用新型提供如下技术方案:
5.一种机器人小臂总成nvh测试台,包括主台体和用于支撑主台体的支撑架,所述主台体包括连接件和固定连接在所述连接件上下两侧的定位台和安装台,所述定位台上设置有用于定位机器人小臂的定位孔,所述安装台上固定连接有多个驱动电机,所述驱动电机输出端伸向定位台,且驱动电机输出端固定连接有用于传动连接机器人小臂的传动连接件。
6.进一步地,所述驱动装置为驱动电机,驱动电机设置有两个以上,且各驱动电机输出端连接的传动连接件呈阶梯式设置。
7.进一步地,多个驱动电机关于定位孔呈周向等间隔设置。
8.进一步地,所述传动连接件为齿轮,驱动装置通过齿轮啮合传动连接于机器人小臂。
9.进一步地,所述连接件为连接板,连接板间隔设置有多个。
10.进一步地,所述支撑架对称设置在主台体左右两侧。
11.进一步地,所述支撑架包括立板和固定连接在立板底部的底板。
12.进一步地,所述支撑架还包括肋板,所述肋板固定连接在立板和底板之间。
13.进一步地,所述肋板为楔形,且垂直于立板和底板。
14.进一步地,所述支撑架下还固定连接有底座。
15.与现有技术相比,本实用新型具有如下有益效果:
16.本申请通过连接件和固定连接在连接件上下两侧的定位台和安装台分别定位安装机器人小臂和驱动电机,且驱动电机通过传动连接件与机器人小臂传动连接,从而实现
磨合和nvh测试;通过定位台上的定位孔,可以快捷定位安装机器人小臂;驱动电机设置多个且呈阶梯式设置,实现一步完成多个传动连接,效率高;支撑架包括立板、底板和肋板,结构稳定。
附图说明
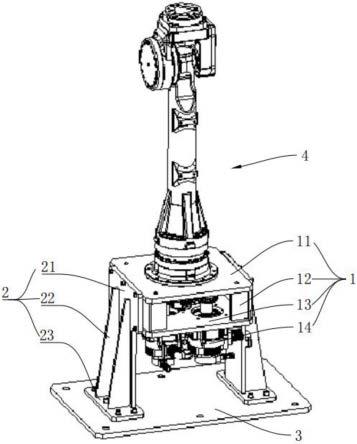
17.图1是本实用新型具体实施例的使用状态立体结构示意图;
18.图2是本实用新型具体实施例的使用状态连接关系示意图;
19.附图中,1、主台体;11、定位台;12、连接件;13、安装台;14、驱动电机;15、齿轮;2、支撑架;21、立板;22、肋板;23、底板;3、底座;4、机器人小臂。
具体实施方式
20.为了使本领域的人员更好地理解本实用新型的技术方案,下面结合本实用新型的附图,对本实用新型的技术方案进行清楚、完整的描述,基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的其它类同实施例,都应当属于本申请保护的范围。此外,以下实施例中提到的方向用词,例如“上”“下”“左”“右”等仅是参考附图的方向,因此,使用的方向用词是用来说明而非限制本实用新型创造。
21.如图1-2所示,一种机器人小臂总成nvh测试台,包括主台体1和用于支撑主台体1的支撑架2,所述主台体1包括连接件12和固定连接在所述连接件12上下两侧的定位台11和安装台13,所述定位台11上设置有用于定位机器人小臂4的定位孔,所述安装台13上固定连接有多个驱动电机14和安装孔,所述驱动电机14从下方穿过安装孔并通过螺栓固定连接在安装台13上,驱动电机14输出端伸向定位台11,且驱动电机14输出端固定连接有用于传动连接机器人小臂4的传动连接件,而具体的,所述传动连接件为齿轮15,通过齿轮15与机器人小臂4的输入端啮合,从而进行传动,进而进行磨合及nvh测试。
22.进一步地,定位孔为阶梯孔,阶梯孔形状与机器人小臂4输入端匹配。
23.进一步地,所述驱动电机14设置有三个,且各驱动电机14输出端连接的齿轮15在定位孔的轴线方向上呈阶梯式设置,具体的,各驱动电机14输出端连接的齿轮15到定位孔轴线的距离从上到下依次减小,对于某些具有多层且同轴的齿轮传动结构的机器人小臂4,其输入端一般呈阶梯式结构,可将机器人小臂4直接从上方插入定位孔中实现一步啮合,同时也兼容单层传动结构,啮合后可通过法兰盘将机器人小臂4固定到定位台11上。
24.进一步地,三个驱动电机14关于定位孔呈周向等间隔设置。
25.进一步地,所述连接件12为连接板,连接板设置有多个,多个连接板间隔设置,减轻重量的同时留出间隙便于直接观察内部连接情况,便于安装,方便维护。
26.进一步地,所述支撑架2对称设置在主台体1左右两侧;所述支撑架2包括立板21和固定连接在立板21底部的底板23;所述支撑架2还包括肋板22,所述肋板22固定连接在立板21和底板23之间;所述肋板22为楔形,且垂直于立板21和底板23。通过上述技术方案,可以为主台体1提供稳定支撑,便于进行nvh测试。
27.进一步地,所述支撑架2下还固定连接有底座3,底座3上设置有多个固定孔,多个定位孔呈多边形排布,具体呈矩形排布,便于固定到地面,提高稳定性。
28.以上已将本实用新型做一详细说明,以上所述,仅为本实用新型之较佳实施例而
已,当不能限定本实用新型实施范围,即凡依本申请范围所作均等变化与修饰,皆应仍属本实用新型涵盖范围内。
技术特征:
1.一种机器人小臂总成nvh测试台,其特征在于,包括主台体(1)和用于支撑主台体(1)的支撑架(2),所述主台体(1)包括连接件(12)和固定连接在所述连接件(12)上下两侧的定位台(11)和安装台(13),所述定位台(11)上设置有用于定位机器人小臂(4)的定位孔,所述安装台(13)上固定连接有多个驱动装置,驱动装置输出端伸向定位台(11),且驱动装置输出端固定连接有用于传动连接机器人小臂(4)的传动连接件。2.根据权利要求1所述的机器人小臂总成nvh测试台,其特征在于,所述驱动装置为驱动电机(14),驱动电机(14)设置有两个以上,且各驱动电机(14)输出端连接的传动连接件呈阶梯式设置。3.根据权利要求2所述的机器人小臂总成nvh测试台,其特征在于,多个驱动电机(14)关于定位孔呈周向等间隔设置。4.根据权利要求1-3任意一项所述的机器人小臂总成nvh测试台,其特征在于,所述传动连接件为齿轮(15),驱动装置通过齿轮(15)啮合传动连接于机器人小臂(4)。5.根据权利要求1所述的机器人小臂总成nvh测试台,其特征在于,所述连接件(12)为连接板,连接板间隔设置有多个。6.根据权利要求1所述的机器人小臂总成nvh测试台,其特征在于,所述支撑架(2)对称设置在主台体(1)左右两侧。7.根据权利要求1或6所述的机器人小臂总成nvh测试台,其特征在于,所述支撑架(2)包括立板(21)和固定连接在立板(21)底部的底板(23)。8.根据权利要求7所述的机器人小臂总成nvh测试台,其特征在于,所述支撑架(2)还包括肋板(22),所述肋板(22)固定连接在立板(21)和底板(23)之间。9.根据权利要求8所述的机器人小臂总成nvh测试台,其特征在于,所述肋板(22)为楔形,且垂直于立板(21)和底板(23)。10.根据权利要求1所述的机器人小臂总成nvh测试台,其特征在于,所述支撑架(2)下还固定连接有底座(3)。
技术总结
本实用新型属于机器人装配技术领域,具体公开一种机器人小臂总成NVH测试台,包括主台体和用于支撑主台体的支撑架,所述主台体包括连接件和固定连接在所述连接件上下两侧的定位台和安装台,所述定位台上设置有用于定位机器人小臂的定位孔,所述安装台上固定连接有多个驱动电机和安装孔,所述驱动电机从下方穿过安装孔并通过螺栓固定连接在安装台上,驱动电机输出端伸向定位台,且驱动电机输出端固定连接有用于传动连接机器人小臂的传动连接件,而具体的,所述传动连接件为齿轮,通过齿轮与机器人小臂的输入端啮合从而进行传动,进而进行磨合及NVH测试,使用方便,性能稳定。性能稳定。性能稳定。
技术研发人员:刘飞 相宁波 王永俊 何安忠
受保护的技术使用者:临沂临工智能信息科技有限公司
技术研发日:2022.10.19
技术公布日:2023/3/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1