基于特征模理论的数字化超表面单元的自动化设计方法
1.本发明属于电磁技术领域,具体涉及基于特征模理论的数字化超表面单元的自动化设计方法。
背景技术:
2.目前的无源单元无法解决灵活实时完成对波束调控的功能,因此提出了新颖bit型单元。目前新颖电控单元的设计方法有:
①
改变加载到变容二极管两端的偏置电压,研究分析超构单元的谐振特性在不同电压下的变化,以实现反射波相位连续型可调或相位差为180
°
;
②
改变加载了pin二极管的贴片结构参数,研究各结构参数对反射波相位的影响,通过结构参数调整获得期望的反射波相位调控性能。
3.现有新颖电控bit型单元虽然解决了阵列调控灵活度的问题,可通过单片机或fpga实时切换阵面编码来完成超表面的多功能应用,但现有所用的单元设计方法均是通过对单元的反射系数进行仿真,由设计者通过仿真扫参并完成结构尺寸参数优化的过程,对设计者来说在此过程中需完成多次对比及调整等不必要的、耗时的重复性工作。
4.针对目前在设计加载二极管元件的反射型调相单元时,每次调整结构参数均需分别考虑二极管导通与截断两种等效电路形式替代情况下的单元特性,因此往往在结构设计过程中,需要反复进行单元效果对比与结构参数的调整,使得单元特性评估过程更加复杂,造成了过分依赖于天线设计者的设计经验与反复的调参优化过程的问题。
技术实现要素:
5.为了克服上述现有技术存在的不足,本发明的目的在于提供基于特征模理论的数字化超表面单元的自动化设计方法,旨在让设计者只需根据期望的单元物理特性预设出明确目标函数,并用遗传算法迭代优化的手段完成对具有期望物理电磁特性的单元结构的自动化设计,无需依靠人为调整,而是直接地完成期望特性的结构设计。
6.为了实现上述目的,本发明采用的技术方案是:
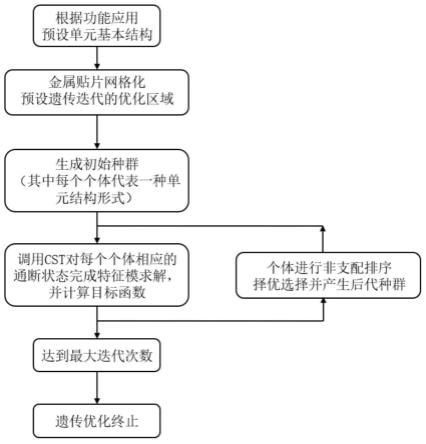
7.基于特征模理论的数字化超表面单元的自动化设计方法,包括以下步骤;
8.步骤一:预设数字化超表面单元的基本结构;
9.步骤二:采用遗传算法,根据步骤一得到的基本结构预设遗传迭代的优化区域并对金属贴片层网格化处理;
10.步骤三:对网格化处理的金属贴片层设定遗传算法种群个体数pop及迭代次数gen;
11.步骤四:对步骤三得到的种群内各网格个体对应表征的单元结构分别设定算法的目标函数;
12.步骤五:对种群内的表征了金属贴片层结构的网格结构个体进行特征模求解,并计算目标函数;
13.步骤六:将步骤五得到的目标函数经遗传迭代产生后代种群个体;
14.步骤七:得到最优个体,结构自动化设计过程结束。
15.所述步骤一基本结构为一种加载了pin二极管的反射型数字化超表面单元结构,是由第一金属层1、第一介质层2及第二金属层3三部分构成的基本结构单元,根据超表面单元结构期望工作频段中心频点f,对应波长为λ,可预设单元结构周期p范围为并选择pin二极管型号。本发明中所述第一金属层1为金属贴片层,第二金属层3为单元结构周期下全覆盖金属层,第一介质层2为介质基板材料。
16.进一步的,所述步骤二考虑到步骤一中所选pin二极管型号,预设出二极管的添加位置,在第一金属层1中央开缝加载的方式,将二极管引入位置设定为结构中央;再预设出单元基本结构的期望设计形式,采用多谐振开缝结构,以保证单元的工作带宽,采用内含有“艹”形开缝的矩形金属片作为第一金属层1的初始结构形式,通过将金属贴片层网格化处理的方式,将其初始结构切割为nx行ny列的无数相同小网格的形式,其中“艹”形开缝即为第一金属层1中需要进行网格随机保留与删除的优化区域,采用划分为方形小网格的形式,网格边长ml应低于中心频点f处波长为λ的二十分之一,网格尺寸尽可能小,将使遗传优化算法中包含的基因位更多,本发明中将第一金属层1进行网格化处理是为了以便于步骤三进行后续操作,对步骤二所预设的优化区域内的小网格进行0或1随机编码赋值,以表征小网格是否保留,赋值为0表征该小网格删除,赋值为1表征该小网格保留,而对第一金属层1预设优化区域外的网格始终编码赋值为1,即网格始终保留的操作,从而达到仅在预定优化区域内完成结构优化的目的。
17.进一步的,所述步骤三设定初始种群内个体数为pop,通过生成pop个随机二进制数组的方式,得到由pop个结构各异的单元结构网格个体构成的初始种群;设定迭代次数为gen,初始种群pop数量越多意味着亲本中可被择优选择的个体越多,迭代次数gen越大意味着最终优化精度越接近目标。
18.进一步的,所述步骤四中需要计算所设目标函数的研究对象是经步骤一、二、三后得到的种群内各网格个体对应表征的单元结构形式,而目标函数的特征与最终期望的数字化单元结构的电磁物理属性(特征模相位差)有关,步骤四所设的目标函数是为了在步骤五中完成针对于种群内的每个网格个体表征的结构形式下的目标函数计算,对所述步骤四中遗传优化的两个目标函数的具体设定如下:
19.目标函数function 1:规定入射波的极化方式为y极化或x极化,要求超表面单元结构网格对应在通断状态下的特征主模极化为入射波同极化方式,目标极化角polar应趋于90
°
或-90
°
,即如式(1):
20.function 1=|polar|-90
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
21.目标函数function 2:根据特征模数字化相位差是相同入射波下电控单元两种状态下的主模模式展开系数相位差、特征角之差及极化角之差三部分共同叠加决定,则期望设计出反射场相位差为δgoal phase的电控数字化单元的特征模数字化相位条件就是:
22.function 2=δmwc+δca+δpolar-δgoal phase
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
23.如式(2)所述,其中,δmwc为通断两态下主模模式展开系数相位差,δca为二者主模特征角之差,δpolar为二者主模极化角之差,δgoal phase为设计目标的期望相位差,优化目标最小值的优化过程使得function 2趋于0,随着迭代优化,目标数字化单元的特征
模数字化相位差特性将趋近于设计目标的期望相位差。
24.进一步的,所述步骤五是基于步骤四中能够反映特征场相位的相关特征模物理参量(主模模式展开系数、特征角、极化角)所表示的期望优化目标函数,结合nsga-ii遗传优化算法,利用matlab语言完成脚本编写,通过调用电磁仿真软件cst studio suite 2020完成模型建立、参数求解以及数据结果记录工作;
25.5-1)模型建立
26.按步骤三所述生成pop个随机二进制数组,其中每个数组是由随机二进制信息表示的个体结构的离散网格形式,pop个网格个体构成初始种群,逐次读取pop个网格个体的二进制信息,并调用电磁软件cst studio suite 2020,完成网格对应位置的结构模型构建;
27.首先,调用cst软件并新建一个工程文件,考虑到初始种群中每个网格个体为一个随机二进制的行向量数组,因此将此行向量数组转换为一个nx行(总网格行数)ny列(总网格列数)的数组矩阵,再按行读取该数组矩阵,并根据二进制信息判断优化区域内网格是否保留(优化区域外网格全部保留,如步骤二所述),若保留则在对应位置处构建网格结构模型,至整个数组矩阵对应的整体上层金属网格结构构建完成,然后根据中间介质层板材参数添加新介质并设置介电常数,并根据单元周期p及介质厚度h完成对中间介质层结构的构建;最后按照单元周期尺寸在介质层下表面完成对全覆盖金属地板结构的构建,至此,完成了基于种群内一个网格个体的超表面单元结构的构建;
28.5-2)参数求解
29.对各网格个体表示的超表面单元,按照单元周期p完成复制平移操作,排布为4
×
4个有限周期结构后,设置频率f处的场监视器:远场farfield、磁场h-field,再利用设置工程求解器为高频积分方程求解器(此工程求解器支持特征模求解,并设置求解分析的特征模模式数量modenum),再完成对沿-z轴垂直入射到单元结构的y极化平面波激励源的设置,将电场矢量’evector’设为(0,1,0),若期望平面波激励源为x极化波垂直入射,只需将电场矢量’evector’改为(1,0,0)即可,另外,考虑到单元结构为反射型超表面单元,单元下表面为全覆盖金属地板,故将工程模型边界条件zmin设置为’electric’,至此,完成对工程的求解设置,并开始工程求解特征模;
30.5-3)数据结果记录
31.当工程完成求解计算后,需要将用于目标函数计算的特征模参数数据进行记录,包括模式展开系数的幅值及相位、特征角、特征场,这一过程通过matlab调用cst读取工程结果并记录数据实现,按特征模序数逐次记录特征模式的远场、特征角及模式展开系数的幅值及相位数据,并按照工程路径分别将数据结果以ascii形式导出,并按模式序数依次命名,存到各参数文件夹下;
32.至此,完成了单元结构模型建立、特征模参数求解以及数据结果记录工作,完成了所述步骤五对种群内结构个体的特征模求解。
33.为了实现步骤五计算目标函数,需判断特征模式主模并完成目标函数相关数据提取,特征模式主模具有两个特征:模式展开系数相对较大;特征模式极化方式与激励源极化方式相同,以上述两个特征为判断依据,具体过程为:
34.首先读取上一步中保存的模式展开系数mwc,找到模式展开系数幅值最大的特征
模式序数并将该模式序数的模式展开系数的相位读取记为mwc_phase;再读取该模式序数的远场分量数据中x分量幅值|ex|及y分量幅值|ey|,如果y极化波激励,模式极化角记为:polar=tan(|ey|/|ex|),而对于x极化波激励时,模式极化角记为:polar=tan(|ex|/|ey|);再读取该模式序数的特征角记为ca,对于步骤三中种群内各网格个体而言,在二极管通断下具有两种结构形式,二者差异仅是工程结构模型中二极管位置处网格结构有无,因此,二者可分别利用上述步骤完成对二极管通断两态下的特征模参数求解与记录工作,故可计算得到用于目标函数1的极化角polar及用于目标函数2的模式展开系数相位差δmwc、特征角之差δca及极化角之差δpolar,从而完成对两个目标函数的计算,并将目标函数结果记录于网格个体的二进制基因位信息后,便于后续步骤六根据目标函数值进行择优选择生成子代种群。
35.进一步的,所述步骤六根据个体基因位信息中记录的目标函数值,完成非支配排序及拥挤度计算,具体过程如下:
36.6-1)非支配排序
37.根据目标函数值通过非支配排序对种群内个体进行优先级分层,个体所属非支配层级数越低,优先级越低,支配地位越高,非支配排序具体过程如下:
38.(1)种群规模为n,种群内个体目标函数值为x(1)、x(2)
……
x(n);
39.(2)设i=1;
40.(3)对全部j=1、2
……
n,且j≠i,通过比较第i个体的目标函数x(i)和第j个体的目标函数x(j)来判断个体i和个体j的支配关系,若不存在任何的x(j)优于x(i),则x(i)记为非支配个体;
41.(4)令i=i+1,重复至(2),直至找到所有非支配个体。
42.经过上述(1)至(4)过程所得的非支配个体集作为种群的第一非支配层(优先级为0),而后将种群内除第一非支配层以外的其他个体重复进行(1)至(4),再得到第二非支配层(优先级为1),以此类推至整个种群的支配关系得到分级排序;
43.6-2)拥挤度计算
44.计算拥挤度是为了对种群中特定个体解周围的其他解的拥挤度进行估计,拥挤度是根据每一目标函数计算的两侧相邻个体解的平均距离,拥挤度计算具体过程如下:
45.(1)根据每个目标函数值的大小的升序顺序对种群个体进行排序;
46.(2)针对每个目标函数,对种群进行非支配排序,取目标函数最大值fmax和最小值fmin对应的个体解为边界解,令边界个体解的拥挤度为无穷大距离,其他中间个体解的拥挤度为两侧相邻个体解的函数值归一化绝对差值,记第j个个体解的第m个目标函数值为f
(m)
(j),在此个体解不属于边界解的情况下,其拥挤度值表示为(f
(m)
(j+1)-f
(m)
(j-1))/(f
(m)
max-f
(m)
min);
47.经过非支配排序及拥挤度计算,种群内每个个体均有此两个属性:非支配层(即优先级)、拥挤度值,并以此为种群内个体优劣比较的依据;
48.若第i个个体x(i)所属非支配层优于第j个个体x(j)所属的非支配层,则个体x(i)优于x(j);若x(i)与x(j)属同一非支配层,则需比较二者拥挤度,若x(i)的第m个目标函数的拥挤度f
(m)
(i)大于x(j)的第m个目标函数的拥挤度f
(m)
(j),则x(i)优于x(j),因此,根据个体的非支配序列大小和拥挤度,择优选择个体构成用于后续迭代的新种群,对新种群内
个体重复进行步骤五,至目标函数最优或至最大迭代次数停止。
49.进一步的,所述步骤七得到最优个体,遗传优化算法进程结束,所得的最优个体所对应的通断两态,即为自动设计出的可用作为反射型调相的数字化单元,此前步骤二中所述明确了pin二极管的添加位置,直接将二极管的导通或截断的等效电路引入此处即可,至此,基于特征模相位条件完成了对加载二极管的可编码超表面单元的自动化设计,自动设计出的最优结构在加载二极管等效电路形式后构成的数字化单元的电磁特性,在中心工作频率f下能够满足特征模数字化相位,符合设计条件。
50.本发明的有益效果:
51.本发明首次推导得出基于特征模理论的数字化相位条件,作为设计加载了有源电控元件的超表面单元的技术原理。本发明基于特征模理论所反映的超表面单元结构的物理特性参数,更加明确了优化目标的物理特性,在优化算法中以明确的电磁特性所表征的收敛目标为体现。这种结合了理论参数概念的自动化优化设计,令最终的设计结果更加满足设计期望目标,提高了优化设计的质量。
52.本发明所用技术方案解决了超表面单元设计过程过分依赖于设计经验与反复调整优化结构参数的问题,提高了设计效率。基于设计者根据预期目标功能所设定的结构形式、相位、频段等条件来直接完成结构设计,设计者只需通过调整本发明技术方案步骤二中预设的优化区域、步骤三中决定优化进程的种群个体数及迭代次数、步骤四中预设的目标函数,其他过程中无需人为进行结构调整与优化,即可基于期望单元基本形式,完成具有一定期望物理特性的可编码超表面单元结构的自动化设计。这极大地减少设计者工作量,缩短了设计进程,提高了设计效率。
附图说明
53.图1是本发明采用的遗传算法迭代优化的流程图。
54.图2是本发明实施例1步骤一预设基本单元结构三维层示意图。
55.图3是本发明实施例1步骤二预设遗传迭代的优化区域示意图。
56.图4是本发明实施例1步骤七最终所得最优个体网格对应的1bit单元导通状态结构。
57.图5是本发明实施例1步骤七最终所得最优个体网格对应的1bit单元截断状态结构。
具体实施方式
58.下面结合附图对本发明作进一步详细说明。
59.本发明旨在基于特征模理论所反映超表面单元结构的物理特性,从由特征模理论的物理参数所表征bit型数字化相位条件的角度出发,以解决实现对具有反相特性的数字化可编码超表面单元的自动化设计的技术问题。鉴于针对结构体的散射问题,特征模理论的相关参数清晰地表征了模式电流、模式远场、主要激励模式展开系数、特征角等物理概念信息,因而从特征场相位的角度,推导得出特征模理论的数字化相位条件,将该数字化相位条件与遗传优化机制结合,实现以该相位条件为优化设计目标函数的算法,从而达到对数字化单元的自动化设计。该优化设计过程完全基于结构的物理特性,因此最终达到的电磁
特性更加符合期望设计目标,而且达到了简化结构设计流程并缩短优化进程的目的。
60.本发明的目的是阐述了一种全新的电控bit型单元设计方法,首先基于特征模理论在散射方面的基本原理,类比总感应电流与特征电流的关系以及总散射场与特征场的关系,可知特征场的相位即可表征反射系数相位,推导得出基于特征模理论参数(模式展开系数、特征角、极化角)设计反相数字化单元的技术原理,通过该数字化相位条件更加明确了设计者对自动化设计结果的期望物理特性,以此为优化目标函数的最终结果的电磁特性更加符合设计预期。结合该技术原理与遗传优化机制,先通过对单元金属贴片层预设区域内网格化处理的方式以完成结构的保留与剔除操作,得到一定数量不同形状的结构个体作为初始种群,进而基于matlab语言进行算法编写计算特征模参数,根据由特征模参数所表征的数字化相位条件,经迭代直接完成对数字化单元的自动化设计,同时达到简化结构设计流程与缩短优化进程的目的。
61.本发明技术方案阐述了一种基于特征模理论物理参量的数字化超表面单元的自动化设计方法,包括以下几个步骤:
62.步骤一:预设单元的基本结构;
63.一种加载了pin二极管的反射型数字化超表面单元结构,其特征是,是由第一金属层1、第一介质层2及第二金属层3三部分构成的基本结构单元。参照图2,金属层指的是自上而下分布的第一金属层1、第二金属层3;介质层为第一介质层2。根据超表面单元期望工作频段中心频点f,该频率下对应波长为λ,可预设单元结构周期p范围为选择pin二极管型号。本发明中所述第一金属层1为金属贴片层,第二金属层3为单元结构周期下全覆盖金属层,第一介质层2为介质基板材料。
64.步骤二:预设遗传迭代的优化区域并对金属贴片层网格化处理;
65.所述步骤二考虑到步骤一中所选pin二极管型号,预设出二极管的添加位置,本发明采用在第一金属层1中央开缝加载的方式,将二极管引入位置设定为结构中央;再预设出单元基本结构的期望设计形式,本发明采用多谐振开缝结构,以保证单元的工作带宽,因此,选择采用内含有“艹”形开缝的矩形金属片作为第一金属层1的初始结构形式。通过将金属贴片层网格化处理的方式,将其初始结构切割为nx行ny列的无数相同小网格的形式,其中“艹”形开缝即为第一金属层1中需要进行网格随机保留与删除的优化区域。本发明采用划分为方形小网格的形式,网格边长ml应低于中心频点f处波长为λ的二十分之一,网格尺寸尽可能小将使遗传优化算法中包含的基因位更多,从而提高结构精度以保证种群内个体多样性。本发明中将第一金属层1进行网格化处理是为了以便于步骤三进行后续操作。对步骤二所预设的优化区域内的小网格进行0或1随机编码赋值,以表征小网格是否保留,赋值为0表征该小网格删除,赋值为1表征该小网格保留,而对第一金属层1预设优化区域外的网格始终编码赋值为1,即网格始终保留的操作,从而达到仅在预定优化区域内完成结构优化的目的。
66.步骤三:设定遗传算法种群个体数pop及迭代次数gen;
67.所述步骤三设定初始种群内个体数为pop,通过生成pop个随机二进制数组的方式,得到由pop个结构各异的单元结构网格个体构成的初始种群;设定迭代次数为gen,初始种群pop数量越多意味着亲本中可被择优选择的个体越多,迭代次数gen越大意味着最终优
化精度越接近目标,但种群个体过多或迭代次数较大,将会增加计算量并延长自动化设计的进程,需要设定适当的个体数与迭代数,以便更快完成自动设计。
68.步骤四:设定算法的目标函数;
69.需要计算步骤四所设目标函数的研究对象是经步骤一二三后得到的种群内各网格个体对应表征的单元结构形式,而目标函数的特征与最终期望的1bit单元结构的电磁物理属性(特征模相位差)有关,步骤四所设的目标函数是为了在步骤五中完成针对于种群内的每个网格个体表征的结构形式下的目标函数计算。因此,对所述步骤四中遗传优化的两个目标函数的具体设定如下:
70.目标函数function 1:规定入射波的极化方式为y极化或者x极化,要求超表面单元结构网格对应在通断状态下的特征主模极化为入射波同极化方式,目标极化角polar应趋于90
°
或-90
°
,即如式(1):
71.function 1=|polar|-90
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
72.目标函数function 2:根据特征模数字化相位差是相同入射波下电控单元两种状态下的主模模式展开系数相位差、特征角之差及极化角之差三部分共同叠加决定,则期望设计出反射场相位差为δgoal phase的电控数字化单元的特征模数字化相位条件就是:
73.function 2=δmwc+δca+δpolar-δgoal phase
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
74.如式(2)所述,其中,δmwc为通断两态下主模模式展开系数相位差,δca为二者主模特征角之差,δpolar为二者主模极化角之差,δgoalphase为设计目标的期望相位差。优化目标最小值优化使得function 2趋于0,随着迭代优化,目标数字化单元的特征模数字化相位差特性将趋近于设计目标的期望相位差。
75.步骤五:对种群内的表征了金属贴片层结构的网格结构个体进行特征模求解,并计算目标函数;
76.所述步骤五是基于步骤四中能够反映特征场相位的相关特征模物理参量(主模模式展开系数、特征角、极化角)所表示的期望优化目标函数,结合nsga-ii遗传优化算法,利用matlab语言完成脚本编写,通过调用电磁仿真软件cst studio suite 2020完成模型建立、参数求解以及数据结果记录工作;
77.5-1)模型建立
78.按步骤三所述生成pop个随机二进制数组,其中每个数组是由随机二进制信息表示的个体结构的离散网格形式,pop个网格个体构成初始种群,逐次读取pop个网格个体的二进制信息,并调用电磁软件cst studio suite 2020,完成网格对应位置的结构模型构建;
79.首先,调用cst软件并新建一个工程文件,考虑到初始种群中每个网格个体为一个随机二进制的行向量数组,因此将此行向量数组转换为一个nx行(总网格行数)ny列(总网格列数)的数组矩阵,再按行读取该数组矩阵,并根据二进制信息判断优化区域内网格是否保留(优化区域外网格全部保留,如步骤二所述),若保留则在对应位置处构建网格结构模型,至整个数组矩阵对应的整体上层金属网格结构构建完成。然后根据中间介质层板材参数添加新介质并设置介电常数,并根据单元周期p及介质厚度h完成对中间介质层结构的构建;最后按照单元周期尺寸在介质层下表面完成对全覆盖金属地板结构的构建。至此,完成了基于种群内一个网格个体的超表面单元结构的构建;
80.5-2)参数求解
81.对各网格个体表示的超表面单元,按照单元周期p完成复制平移操作,排布为4
×
4个有限周期结构后,设置频率f处的场监视器:远场farfield、磁场h-field,再利用设置工程求解器为高频积分方程求解器(此工程求解器支持特征模求解,并设置求解分析的特征模模式数量modenum),再完成对沿-z轴垂直入射到单元结构的y极化平面波激励源的设置,将电场矢量’evector’设为(0,1,0),若期望平面波激励源为x极化波垂直入射,只需将电场矢量’evector’改为(1,0,0)即可,另外,考虑到单元结构为反射型超表面单元,单元下表面为全覆盖金属地板,故将工程模型边界条件zmin设置为’electric’,至此,完成对工程的求解设置,并开始工程求解特征模。
82.5-3)数据结果记录
83.当工程完成求解计算后,需要将用于目标函数计算的特征模参数数据进行记录,包括模式展开系数的幅值及相位、特征角、特征场,这一过程通过matlab调用cst读取工程结果并记录数据实现,按特征模序数逐次记录特征模式的远场、特征角及模式展开系数的幅值及相位数据,并按照工程路径分别将数据结果以ascii形式导出,并按模式序数依次命名,存到各参数文件夹下;
84.至此,完成了单元结构模型建立、特征模参数求解以及数据结果记录工作,完成了所述步骤五对种群内结构个体的特征模求解。
85.为了实现步骤五计算目标函数,需判断特征模式主模并完成目标函数相关数据提取,特征模式主模具有两个特征:模式展开系数相对较大;特征模式极化方式与激励源极化方式相同,以上述两个特征为判断依据,具体过程为:
86.首先读取上一步中保存的模式展开系数mwc,找到模式展开系数幅值最大的特征模式序数并将该模式序数的模式展开系数的相位读取记为mwc_phase;再读取该模式序数的远场分量数据中x分量幅值|ex|及y分量幅值|ey|,如果y极化波激励,模式极化角记为:polar=tan(|ey|/|ex|),而对于x极化波激励时,模式极化角记为:polar=tan(|ex|/|ey|);再读取该模式序数的特征角记为ca,对于步骤三中种群内各网格个体而言,在二极管通断下具有两种结构形式,二者差异仅是工程结构模型中二极管位置处网格结构有无,因此,二者可分别利用上述步骤完成对二极管通断两态下的特征模参数求解与记录工作,故可计算得到用于目标函数1的极化角polar及用于目标函数2的模式展开系数相位差δmwc、特征角之差δca及极化角之差δpolar,从而完成对两个目标函数的计算,并将目标函数结果记录于网格个体的二进制基因位信息后,便于后续步骤六根据目标函数值进行择优选择生成子代种群。
87.步骤六:经遗传迭代产生后代种群个体;
88.所述步骤六根据个体基因位信息中记录的目标函数值,完成非支配排序及拥挤度计算,具体过程如下:
89.6-1)非支配排序
90.根据目标函数值通过非支配排序对种群内个体进行优先级分层,个体所属非支配层级数越低,优先级越低,支配地位越高,非支配排序具体过程如下:
91.(1)种群规模为n,种群内个体目标函数值为x(1)、x(2)
……
x(n);
92.(2)设i=1;
93.(3)对全部j=1、2
……
n,且j≠i,通过比较第i个体的目标函数x(i)和第j个体的目标函数x(j)来判断个体i和个体j的支配关系,若不存在任何的x(j)优于x(i),则x(i)记为非支配个体;
94.(4)令i=i+1,重复至(2),直至找到所有非支配个体。
95.经过上述(1)至(4)过程所得的非支配个体集作为种群的第一非支配层(优先级为0),而后将种群内除第一非支配层以外的其他个体重复进行(1)至(4),再得到第二非支配层(优先级为1),以此类推至整个种群的支配关系得到分级排序。
96.6-2)拥挤度计算
97.计算拥挤度是为了对种群中特定个体解周围的其他解的拥挤度进行估计,拥挤度是根据每一目标函数计算的两侧相邻个体解的平均距离,拥挤度计算具体过程如下:
98.(1)根据每个目标函数值的大小的升序顺序对种群个体进行排序;
99.(2)针对每个目标函数,对种群进行非支配排序,取目标函数最大值fmax和最小值fmin对应的个体解为边界解,令边界个体解的拥挤度为无穷大距离,其他中间个体解的拥挤度为两侧相邻个体解的函数值归一化绝对差值,记第j个个体解的第m个目标函数值为f
(m)
(j),在此个体解不属于边界解的情况下,其拥挤度值表示为(f
(m)
(j+1)-f
(m)
(j-1))/(f
(m)
max-f
(m)
min);
100.经过非支配排序及拥挤度计算,种群内每个个体均有此两个属性:非支配层(即优先级)、拥挤度值,并以此为种群内个体优劣比较的依据;
101.若第i个个体x(i)所属非支配层优于第j个个体x(j)所属的非支配层,则个体x(i)优于x(j);若x(i)与x(j)属同一非支配层,则需比较二者拥挤度,若x(i)的第m个目标函数的拥挤度f
(m)
(i)大于x(j)的第m个目标函数的拥挤度f
(m)
(j),则x(i)优于x(j),因此,根据个体的非支配序列大小和拥挤度,择优选择个体构成用于后续迭代的新种群,对新种群内个体重复进行步骤五,至目标函数最优或至最大迭代次数停止。
102.步骤七:得到最优个体,结构自动设计过程结束。
103.所述步骤七遗传优化算法进程结束。所得的最优个体所对应的通断两态,即为自动设计出的可用作为反射型调相的数字化单元。此前步骤二中所述明确了pin二极管的添加位置,直接将二极管的导通或截断的等效电路引入此处即可。至此,基于特征模相位条件完成了对加载二极管的可编码超表面单元的自动化设计。自动设计出的最优结构在加载二极管等效电路形式后构成的数字化单元的电磁特性,在中心工作频率f下能够满足特征模数字化相位,符合设计条件。
104.本发明首次推导提出基于特征模理论的数字化相位条件,总结了设计电控数字化单元的特征模数字化相位条件是相同入射波下电控单元两种状态下的主模模式展开系数相位差、特征角之差及极化角之差三部分共同叠加决定。作为设计加载了有源电控元件的超表面单元的技术原理,不再是传统的方法中以“黑盒”的方式分析反射系数相位的特征,同现有电控1bit单元的设计相比,本发明所提出的方法是从物理特性上进行设计,基于此发展的优化设计过程更能够反映结构的物理特性。
105.与现有的设计方法相比,本发明所述技术方法是结合了以特征模物理概念参量表征的数字化相位条件为设计的目标函数,并以遗传迭代优化算法机制为技术手段,基于设计者根据预期目标功能所设定的结构形式、相位、频段等条件来直接完成结构设计,过程中
无需人为进行结构调整与优化。本发明技术方案不仅使得最终的优化目标的电磁物理特性更符合期望设计目标,同时极大地减少设计者工作量,缩短了设计进程。
106.实施例1
107.参照图1,结合实施例1,对本发明技术的具体步骤进行详细说明。
108.步骤一:预设单元的基本结构
109.参照图2,一种加载了pin二极管的反射型数字化超表面单元结构,其特征是,是由第一金属层1、第一介质层2及第二金属层3三部分构成的基本结构单元。金属层自上而下分布的第一金属层1、第二金属层3;介质层为第一介质层2。第一金属层1和第二金属层3分别位于第一介质层2的上表面和下表面。
110.单元结构周期p为12mm,为波长λ的0.4倍。本实施例中第一介质层2,介质材料采用厚度h为1.58mm、相对介电常数εr为2.55且损耗角正切tanδ为0.0019的taconic tlx基板材料。第一金属层1参照图3所述,方形金属贴片边长l为7.5mm,贴片中心开缝并采用加载型号为skyworks smp1340的pin二极管,该型号二极管在导通时其等效电路为1ω的电阻和450ph的电感的串联电路;在截断时其等效电路为10ω的电阻、450ph的电感及100ff的电容的串联电路。第二金属层3,为单元周期下全覆盖的金属板。
111.步骤二:预设遗传迭代的“艹”形优化区域
112.参照图3,将第一金属层1的方形金属贴片划分为nx为30行、ny为30列的小网格区域,各小网格的边长ml为0.25mm。考虑到单元极化方式及二极管型号,第一金属层1内部“艹”形优化区域由缝隙1、缝隙2及缝隙3构成。
113.所述的缝隙1,贴片网格区域中央第15行预设的一条沿x轴缝隙,宽度ml为0.25mm,长度l为7.5mm,其中pin管位于第15行第15列小网格位置处。电控单元在pin管导通和断开两种状态下,可理想地等效为金属片的有无,故第15行第15列小网格处的编码赋值0或1即可表示通断。为保证最终的单元结构有相对较宽的工作带宽,采用沿y轴对称开缝以增加谐振结构。y轴左侧的缝隙2,其特征为长度l为7.5mm,宽度d2为1.5mm,对应网格区域的第9至14列,距离金属片左边缘d1为2mm;y轴右侧的缝隙3,其特征为长度l为7.5mm,宽度d2为1.5mm,对应网格区域的第16至21列,距离金属片右边缘d1为2mm,与缝隙1(网格区域第15行)共同构成“艹”形缝隙。将此“艹”形缝隙区域(除pin管所在的网格点外)规定为进行遗传迭代的优化区域。
114.步骤三:设定遗传算法种群个体数pop及迭代次数gen;
115.对步骤二中“艹”形优化区域内的小网格进行0或1随机编码赋值,以表征小网格是否保留(0即小网格删除,1即小网格保留),而对第一金属层1优化区域外的网格始终编码赋值为1(网格保留),从而达到仅在“艹”形区域内结构优化的目的,产生众多结构各异的单元网格,作为算法的初始种群内个体。
116.实施例1中设定初始种群内个体数pop为40,得到由40个结构各异的单元结构网格个体构成的初始种群;设定迭代次数gen为20。初始种群pop数量越多意味着亲本中可被择优选择的个体越多,迭代次数gen越大意味着最终优化精度越接近目标。但种群个体过多或迭代次数较大,将会增加计算量并延长自动化设计的进程。因此,需要设定适当的个体数与迭代数,以便更快完成自动设计。
117.步骤四:设定算法的目标函数;
118.目标函数function 1:规定入射波的极化方式为y极化,要求超表面单元结构网格对应在通断状态下的特征主模极化为入射波同极化方式,目标极化角polar应趋于90
°
或-90
°
,即如式(1):
119.function 1=|polar|-90
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
120.目标函数function 2:根据特征模数字化相位差是相同入射波下电控单元两种状态下的主模模式展开系数相位差、特征角之差及极化角之差三部分共同叠加决定,则期望设计出反射场相位差δgoal phase为180
°
的电控1bit单元的特征模数字化相位条件就是:
121.function 2=δmwc+δca+δpolar-δgoal phase
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
122.如式(2)所述,其中,δmwc为通断两态下主模模式展开系数相位差,δca为二者主模特征角之差,δpolar为二者主模极化角之差。本发明技术方案中采用最小值优化算法,优化目标function 2趋于0。实施例1中采用规定1bit单元特性要求特征模相位差为180
°
,即表征设计目标的期望相位差的δgoal phase为180
°
。按照设计者的期望相位要求,可依照需求进行修改。
123.步骤五:对种群内的表征了金属贴片层结构的网格结构个体进行特征模求解,并计算目标函数;
124.本实施例所述步骤五是基于步骤四中能够反映特征场相位的相关特征模物理参量(主模模式展开系数、特征角、极化角)所表示的期望优化目标函数,结合nsga-ii遗传优化算法,利用matlab语言完成脚本编写,通过调用电磁仿真软件cst studio suite 2020完成模型建立、参数求解以及数据结果记录工作,具体过程如下:
125.5-1)模型建立
126.按步骤三所述生成pop个随机二进制数组,其中每个数组是由随机二进制信息表示的个体结构的离散网格形式,pop个网格个体构成初始种群。逐次读取pop个网格个体的二进制信息,并调用电磁软件cst studio suite 2020,完成网格对应位置的结构模型构建。
127.首先,调用cst软件并新建一个工程文件。考虑到初始种群中每个网格个体为一个随机二进制的行向量数组,因此将此行向量数组转换为一个nx为30行(总网格行数)ny为30列(总网格列数)的数组矩阵,再按行读取该数组矩阵,并根据二进制信息判断优化区域内网格是否保留(优化区域外网格全部保留,如步骤二所述),若保留则在对应位置处构建网格结构模型,至整个数组矩阵对应的整体上层金属网格结构构建完成。然后根据中间介质层板材参数添加新介质并设置介电常数,并根据单元周期p及介质厚度h完成对中间介质层结构的构建;最后按照单元周期尺寸在介质层下表面完成对全覆盖金属地板结构的构建。至此,完成了基于种群内一个网格个体的超表面单元结构的构建。
128.5-2)参数求解
129.对各网格个体表示的超表面单元,按照单元周期p完成复制平移操作,排布为4
×
4个有限周期结构后,设置频率f处的场监视器:远场farfield(f=10ghz)、磁场h-field(f=10ghz),再利用设置工程求解器为高频积分方程求解器(此工程求解器支持特征模求解,并设置求解分析的特征模模式数量modenum为20),再完成对沿-z轴垂直入射的y极化平面波激励源的设置。另外,考虑到本发明所设计的单元结构为反射型超表面单元,单元下表面为全覆盖金属地板,故将工程模型边界条件zmin设置为’electric’。至此,完成对工程的求解
设置,并开始工程求解特征模。
130.5-3)数据结果记录
131.当工程完成求解计算后,需要将用于目标函数计算的特征模参数数据进行记录,包括模式展开系数的幅值及相位、特征角、特征场。这一过程通过matlab调用cst读取工程结果并记录数据实现。按特征模序数逐次记录特征模式的远场farfield、特征角及模式展开系数的幅值及相位数据,并按照工程路径分别将数据结果以ascii形式导出,并按模式序数依次命名,存到各参数文件夹下。
132.至此,完成了单元结构模型建立、特征模参数求解以及数据结果记录工作,完成了所述步骤五对种群内结构个体的特征模求解。
133.为了实现步骤五计算目标函数,需判断特征模式主模并完成目标函数相关数据提取,特征模式主模具有两个特征:模式展开系数相对较大;特征模式极化方式与激励源极化方式相同。以上述两个特征为判断依据,具体过程为:首先读取上一步中保存的模式展开系数mwc,找到模式展开系数幅值最大的特征模式序数并将该模式序数的模式展开系数的相位读取记为mwc_phase;再读取该模式序数的远场分量数据中x分量幅值|ex|及y分量幅值|ey|,模式极化角记为:polar=tan(|ey|/|ex|);再读取该模式序数的特征角记为ca。对于步骤三中种群内各网格个体而言,在二极管通断下具有两种结构形式,二者差异仅是工程结构模型中二极管位置处网格结构有无。因此,二者可分别利用上述步骤完成对二极管通断两态下的特征模参数求解与记录工作。故可计算得到用于目标函数1的极化角polar及用于目标函数2的模式展开系数相位差δmwc、特征角之差δca及极化角之差δpolar,从而完成对两个目标函数的计算,并将目标函数结果记录于网格个体的二进制基因位信息后,便于后续步骤六根据目标函数值进行择优选择生成子代种群。
134.步骤六:经遗传迭代产生后代种群个体;
135.对种群内个体进行非支配排序与拥挤度计算,根据个体的非支配序列大小和拥挤度,择优选择产生用于后续迭代的新种群,对新种群内个体重复进行步骤五,至目标函数最优或至最大迭代次数停止。所述步骤六根据个体基因位信息中记录的目标函数值,完成非支配排序及拥挤度计算,具体过程如下:
136.6-1)非支配排序
137.根据目标函数值通过非支配排序对种群内个体进行优先级分层,个体所属非支配层级数越低,优先级越低,支配地位越高。非支配排序具体过程如下:
138.(1)种群规模为n,种群内个体目标函数值为x(1)、x(2)
……
x(n);
139.(2)设i=1;
140.(3)对全部j=1、2
……
n,且j≠i,通过比较第i个体的目标函数x(i)和第j个体的目标函数x(j)来判断个体i和个体j的支配关系。若不存在任何的x(j)优于x(i),则x(i)记为非支配个体;
141.(4)令i=i+1,重复至(2),直至找到所有非支配个体。
142.经过上述(1)至(4)过程所得的非支配个体集作为种群的第一非支配层(优先级为0),而后将种群内除第一非支配层以外的其他个体重复进行(1)至(4),再得到第二非支配层(优先级为1),以此类推至整个种群的支配关系得到分级排序。
143.6-2)拥挤度计算
144.计算拥挤度是为了对种群中特定个体解周围的其他解的拥挤度进行估计,拥挤度是根据每一目标函数计算的两侧相邻个体解的平均距离。拥挤度计算具体过程如下:
145.(1)根据每个目标函数值的大小的升序顺序对种群个体进行排序;
146.(2)针对每个目标函数,对种群进行非支配排序,取目标函数最大值fmax和最小值fmin对应的个体解为边界解,令边界个体解的拥挤度为无穷大距离,其他中间个体解的拥挤度为两侧相邻个体解的函数值归一化绝对差值。记第j个个体解的第m个目标函数值为f
(m)
(j),在此个体解不属于边界解的情况下,其拥挤度值表示为(f
(m)
(j+1)-f
(m)
(j-1))/(f
(m)
max-f
(m)
min)。
147.经过非支配排序及拥挤度计算,种群内每个个体均有此两个属性:非支配层(即优先级)、拥挤度值,并以此为种群内个体优劣比较的依据。若第i个个体x(i)所属非支配层优于第j个个体x(j)所属的非支配层,则个体x(i)优于x(j);若x(i)与x(j)属同一非支配层,则需比较二者拥挤度,若x(i)的第m个目标函数的拥挤度f
(m)
(i)大于x(j)的第m个目标函数的拥挤度f
(m)
(j),则x(i)优于x(j)。因此,根据个体的非支配序列大小和拥挤度,择优选择个体构成用于后续迭代的新种群,对新种群内个体重复进行步骤五,至目标函数最优或至最大迭代次数停止。
148.步骤七:得到最优个体,结构自动设计过程结束。
149.参照图4、图5,说明了最优个体网格对应电控单元的金属贴片结构区域。步骤二所述明确了pin二极管的添加位置,故直接将二极管的导通或截断的等效电路引入此处即可,因此,可得迭代终止后所得的最优个体所对应的通断两态,即为自动设计出的可用作为反射型调相的1bit数字化单元。参照图4,为导通状态的第一金属层1网格结构,边长l为7.5mm的方形金属片内,有两条沿y轴长度l1为6.5mm,宽度s为0.5mm的缝隙(缝隙边缘距离l2为2mm),以及贴片中央处一条中间由表征pin管位置的方形格阻断的沿x轴缝隙。参照图5,为截止状态的第一金属层1网格结构,有两条沿y轴长度l1为6.5mm,宽度s为0.5mm的缝隙(缝隙边缘距离l2为2mm),以及中央一条长度l2为2mm、宽度ml为0.25mm的沿x轴缝隙。至此,基于特征模相位条件完成了对加载二极管的可编码超表面单元的自动化设计。自动设计出的最优结构在加载二极管等效电路形式后构成的数字化单元的电磁特性,在中心工作频率f为10ghz下能够满足特征模数字化相位,符合设计条件。
150.本实施例中用到的参数,如表1所示。
151.表1实施例1中的参数列表
152.pld1d212mm7.5mm2mm1.5mmmll1l2s0.25mm6.5mm2mm0.5mm
153.本发明所述的实施例1采用预设频率点f为10ghz,特征模相位差为180
°
。但基于本发明技术方法的实施例非必须采用频率点为10ghz,特征模相位差为180
°
的设定条件,可依据设计者的期望频段与相位效果,对步骤一中单元周期p、步骤二中优化区域形状、步骤四中目标函数等进行修改,满足设计需求即可;本发明的实施例1非必须采用单元周期p为12mm;本发明的实施例1非必须采用所设的种群个体数pop及迭代次数gen,可根据实际迭代进程进行修改,满足设计需求即可;本发明的实施例1中非必须采用同参数的taconic tlx
基板材料和同型号pin二极管,可考虑成本及加工等问题后,根据板材、元器件、应用频段等实际应用需求进行替换,满足设计需求即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1