一种机器人仿生皮肤压力传感装置的制作方法
1.本实用新型涉及机器人皮肤压力传感器技术领域,具体为一种机器人压力传感器和霍尔传感器。
背景技术:
2.机器人除了自己肢体活动外还需要感受外力作用,这样会使得机器人活动运动关节的轻重缓急不可控,并且会伤害自己本身皮肤或者关节驱动元件,还会损坏或伤害他接触的物体和动物。
3.为了解决机器人活动关节的轻重缓急运动可控,本实用新型创新采用柔性液体管道传感方法感受自身作用力和外力作用力,再通过导管将相应作用力传递给远端的末端元件,驱动远端的末端元件与霍尔元件感应相应的物理特性变化再转变成电信号,经mcu处理,转变成数字信号供其他处理器处理该作用力的数字数据的方法。
技术实现要素:
4.本实用新型提供了一种机器人仿生皮肤压力传感装置,解决了现有技术中存在机器人无法感受外力,在运动时会使得机器人活动运动关节的轻重缓急不可控,并且会伤害自己本身皮肤或者关节驱动元件,还会损坏或伤害他接触的物体和动物的缺点。
5.本实用新型提供了如下技术方案:
6.一种机器人仿生皮肤压力传感装置,包括:
7.嵌在皮肤内层填充层里面或固定在仿生骨骼架上面的柔性管道,所述柔性管道的内部注有液体,所述柔性管道的底部通过接口固定连接有导通管道,所述导通管道的另一端固定连接有感应管,所述感应管的另一端固定安装有固定块;
8.感应组件,所述感应组件用于感应液体的流动而产生电子数据;
9.数据处理组件,所述数据处理组件用于将传感器获取的数据输出为需要的数字数据。
10.在一种可能的设计中,所述感应组件包括与感应管的圆周内壁滑动连接的阻塞元件,所述阻塞元件的一端固定连接有永磁铁,所述永磁铁与感应管滑动连接,所述永磁铁的另一端固定连接有弹性元件,所述弹性元件的另一端固定连接有霍尔传感器,所述霍尔传感器与固定块固定连接。
11.感应管的外壳由隔磁材料包裹,防止外部磁场对霍尔传感器的感应数据精度产生影响。
12.在一种可能的设计中,所述数据处理组件包括mcu,所述固定块上设置有数据接口,所述固定块通过接口连接有传输线,所述传输线将数据传输给mcu。
13.在一种可能的设计中,所述阻塞元件的圆周外壁固定安装有密封圈。
14.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本实用新型。
15.本实用新型中,可以通过柔性管道内液体的移动来模拟力的作用,当柔性管道受力被挤压时发生形变,并且内部液体受力的作用挤压经过导通管道流入到感应管,感应管内部液体增加会使得感应管内部做伸缩运动并且推动阻塞元件运动,阻塞元件带动永磁铁沿着管道伸缩运动;
16.本实用新型中,可以将液体造成的物理信号转换为需要的的数字数据来模拟出受到的作用力,当永磁铁接近霍尔传感器,在洛伦磁力作用下霍尔传感器输出感应信号,供外部mcu识别处理;
17.本实用新型中,可以通过柔性管道内液体的移动来模拟力的作用,之后可将液体造成的物理信号转换为需要的的数字数据来模拟出受到的作用力。
附图说明
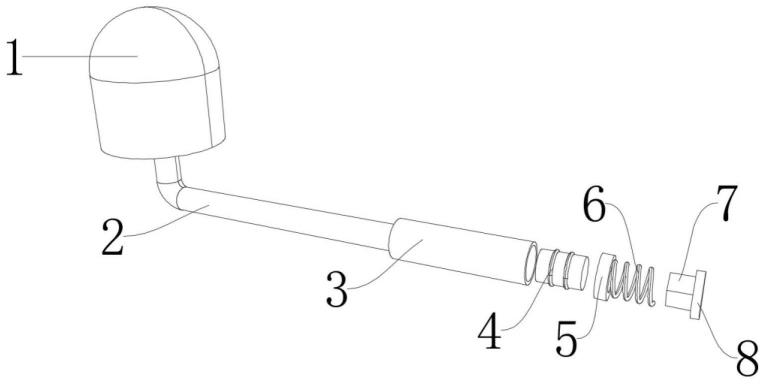
18.图1为本实用新型实施例所提供的一种机器人仿生皮肤压力传感装置的三维结构示意图;
19.图2为本实用新型实施例所提供的一种机器人仿生皮肤压力传感装置的组件连接示意图;
20.图3为本实用新型实施例所提供的一种机器人仿生皮肤压力传感装置的剖视结构示意图;
21.图4为本实用新型实施例所提供的一种机器人仿生皮肤压力传感装置的mcu原理结构示意图。
22.附图标记:
23.1、柔性管道;2、导通管道;3、感应管;4、阻塞元件;5、永磁铁;6、弹性元件;7、霍尔传感器;8、固定块;9、传输线;10、mcu;11、液体。
具体实施方式
24.下面结合本实用新型实施例中的附图对本实用新型实施例进行描述。
25.在本实用新型实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语、“连接”、“安装”应做广义理解,例如,“连接”可以是可拆卸地连接,也可以是不可拆卸地连接;可以是直接连接,也可以通过中间媒介间接连接。此外“连通”可以是直接连通,也可以通过中间媒介间接连通。其中,“固定”是指彼此连接且连接后的相对位置关系不变。本实用新型实施例中所提到的方位用语,例如,“内”、“外”、“顶”、“底”等,仅是参考附图的方向,因此,使用的方位用语是为了更好、更清楚地说明及理解本实用新型实施例,而不是指示或暗指所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型实施例的限制。
26.本实用新型实施例中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
27.在本实用新型实施例中,“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
28.在本说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本实用新型的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
29.实施例1
30.参照图1-4,一种机器人仿生皮肤压力传感装置,包括:
31.嵌在皮肤内层填充层里面或固定在仿生骨骼架上面的柔性管道1,柔性管道1的内部注有液体11,柔性管道1的底部通过接口固定连接有导通管道2,导通管道2的另一端固定连接有感应管3,感应管3的另一端固定安装有固定块8;
32.感应组件,感应组件用于感应液体11的流动而产生电子数据;
33.数据处理组件,数据处理组件用于将传感器获取的数据输出为需要的数字数据。
34.上述技术方案可通过挤压柔性管道1,使内部液体发生变化,让霍尔传感器7获取感应数据,再经过mcu10进行处理来获取数字数据,以此进行压力的模拟。
35.参照图1-3,本实施例中,感应组件包括与感应管3的圆周内壁滑动连接的阻塞元件4,阻塞元件4的一端固定连接有永磁铁5,永磁铁5与感应管3滑动连接,永磁铁5的另一端固定连接有弹性元件6,弹性元件6的另一端固定连接有霍尔传感器7,霍尔传感器7与固定块8固定连接。
36.上述技术方案可通过液体的流动使霍尔传感器7接受到数据。
37.参照图2,本实施例中,数据处理组件包括mcu10,固定块8上设置有数据接口,固定块8通过接口连接有传输线9,传输线9将数据传输给mcu10。
38.上述技术方案可将霍尔传感器7获取到的数据转换为需要使用的数字数据。
39.实施例2
40.参照图1-4,一种机器人仿生皮肤压力传感装置,包括:
41.嵌在皮肤内层填充层里面或固定在仿生骨骼架上面的柔性管道1,柔性管道1的内部注有液体11,柔性管道1的底部通过接口固定连接有导通管道2,导通管道2的另一端固定连接有感应管3,感应管3的另一端固定安装有固定块8;
42.感应组件,感应组件用于感应液体11的流动而产生电子数据;
43.数据处理组件,数据处理组件用于将传感器获取的数据输出为需要的数字数据。
44.上述技术方案可通过挤压柔性管道1,使内部液体发生变化,让霍尔传感器7获取感应数据,再经过mcu10进行处理来获取数字数据,以此进行压力的模拟。
45.参照图1-3,本实施例中,感应组件包括与感应管3的圆周内壁滑动连接的阻塞元件4,阻塞元件4的一端固定连接有永磁铁5,永磁铁5与感应管3滑动连接,永磁铁5的另一端固定连接有弹性元件6(可以为弹簧或者弹片),弹性元件6的另一端固定连接有霍尔传感器7,霍尔传感器7与固定块8固定连接。
46.上述技术方案可通过液体的流动使霍尔传感器7接受到数据。
47.感应管4的外壳由隔磁材料包裹,防止外部磁场对霍尔传感器7的感应数据精度产生影响。
48.参照图2,本实施例中,数据处理组件包括mcu10,固定块8上设置有数据接口,固定块8通过接口连接有传输线9,传输线9将数据传输给mcu10。
49.上述技术方案可将霍尔传感器7获取到的数据转换为需要使用的数字数据。
50.参照图1,本实施例中,阻塞元件4的圆周外壁固定安装有密封圈。
51.上述技术方案可使柔性管道1内的液体不会在工作时流出,影响装置运行。
52.然而,如本领域技术人员所熟知的,mcu、弹性元件和霍尔传感器的工作原理和接线方法是司空见惯的,其均属于常规手段或者公知常识,在此就不再赘述,本领域技术人员可以根据其需要或者便利进行任意的选配。
53.mcu为现有技术,其数据处理所需要的程序为现有技术,不是本技术的创新部分,本技术不再赘述。
54.本技术方案的工作原理及使用流程为:当柔性管道1受力被挤压时发生形变,并且内部液体11受力的作用挤压,经过导通管道2流入到感应管3,感应管3内部液体11增加会使得感应管3内部做伸缩运动并且推动阻塞元件4运动,阻塞元件4带动动永磁铁5沿着管道伸缩运动。当永磁铁5接近霍尔传感器7,在洛伦磁力作用下霍尔传感器7输出感应信号,供外部mcu10识别处理。当所受力消失时柔性管道1受自身回弹力和阻塞元件4回弹力共同作用力恢复初始形态,同时内部液体11受阻塞元件4回弹作用力压缩感应管3内部空间流回到柔性管道1;永磁铁5远离霍尔传感器7,经mcu10识别处理,供外部处理器处理。
55.以上,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内;在不冲突的情况下,本实用新型的实施例及实施例中的特征可以相互组合。因此,本实用新型的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1