一种用于高精度空地一体联合建模的手持近景采集装置的制作方法
1.本实用新型涉及测绘技术领域,具体为一种用于高精度空地一体联合建模的手持近景采集装置。
背景技术:
2.在历史建筑建档测绘相关项目中,需要对历史建筑建立电子档案,进而需要对历史建筑进行建模,建模时会借助空地一体联合建模技术,可实现技术优势互补,提高模型的完整性和精确性,空地一体联合建模技术是分别获取地面三维激光扫描点云、地面近景摄影测量影像、无人机倾斜摄影测量影像,进行预处理,随后联合进行空三测量,并制作模型,其地面近景摄影测量影像一般通过手持数码相机进行拍摄,其数码相机使用过程中拍摄角度一般靠使用人员进行控制,进而不能对拍摄角度进行精确的限定,因此会造成拍摄的图像与无人机倾斜摄影测量影像重叠度不够或者分辨率差异过大的情况,进而会影响建模精度,甚至不能进行使用,为此,我们提出一种用于高精度空地一体联合建模的手持近景采集装置。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种用于高精度空地一体联合建模的手持近景采集装置,可以对数码相机的拍摄角度进行预设,数码相机达到指定角度时会发出提示音,进而可以以指定的角度拍摄,以此提高影像重叠度,降低后期数据的处理量,同时提高了建模精度,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种用于高精度空地一体联合建模的手持近景采集装置,包括数码相机和调节单元;
5.数码相机:其下端螺纹连接有螺柱,螺柱的下端设有支撑套,支撑套的中部通过轴承螺纹连接有中心轴,中心轴的左端设有防护壳,防护壳的后侧壁设有单轴倾角传感器,防护壳内部的左端设有电池,防护壳的上侧壁设有蜂鸣器;
6.调节单元:设置于中心轴的右端,调节单元的左端与支撑套固定连接;
7.其中:还包括单片机,所述单片机设置于防护壳的底壁,单轴倾角传感器和电池的输出端均电连接单片机的输入端,蜂鸣器的输入端电连接单片机的输出端,可以利用蜂鸣器的响声可以提示拍摄人员数码相机的拍摄角度以达到预设的角度,进而可达到定角度拍摄目的,进而图像清晰高有效使用率高可以降低数据的处理量,进而可以实现高精度的建模,使用便利性高。
8.进一步的,所述调节单元包括固定套、插槽、滑动桶和定位柱,所述固定套设置于支撑套的右侧面,固定套的内弧壁开设有均匀分布的插槽,滑动桶滑动连接于中心轴的右端,滑动桶左端的插齿分别与插槽活动插接,定位柱对称设置于中心轴外弧面的右端,定位柱分别与滑动桶外弧面的长滑槽滑动连接,可以调节单轴倾角传感器和数码相机之间的夹角。
9.进一步的,所述调节单元还包括刻度环,所述刻度环为铝合金刻度环,定位柱远离中心轴的一端均与刻度环的内弧壁固定连接,方便确定单轴倾角传感器和数码相机之间的夹角。
10.进一步的,所述调节单元还包括挡板和弹簧,所述挡板滑动连接于滑动桶的外弧面,挡板位于定位柱的左侧,弹簧活动套接于滑动桶外弧面的中部,弹簧位于滑动桶左端的插齿与挡板之间,方便限制滑动桶的自由移动。
11.进一步的,所述滑动桶的右端设有手轮,方便控制滑动桶的移动。
12.进一步的,所述刻度环的右端设有防尘板,防尘板与滑动桶滑动连接,防止灰尘的进入。
13.进一步的,所述螺柱外弧面的上端设有定位条,定位条下表面的螺纹孔内部螺纹连接有螺钉,螺钉的上端延伸出定位条的上表面,螺钉的上端设有橡胶垫,橡胶垫与数码相机的下表面接触,方便螺柱的安装定位。
14.与现有技术相比,本实用新型的有益效果是:本用于高精度空地一体联合建模的手持近景采集装置,具有以下好处:
15.1、使用时手持数码相机对需要建模的建筑进行拍摄采集图像信息,在拍摄的同时通过防护壳前侧面的按键调控单片机,单片机工作,单轴倾角传感器将自身的倾斜信息转换为电信号传输给单片机,单轴倾角传感器的检测轴线与中心轴的轴线平行,当单轴倾角传感器处于竖直状态时,单片机控制蜂鸣器工作,蜂鸣器发出响声,然后使用人员进行拍摄,其单轴倾角传感器和数码相机存在连接关系,可以利用蜂鸣器的响声可以提示拍摄人员数码相机的拍摄角度以达到预设的角度,进而可达到定角度拍摄目的,进而图像清晰高有效使用率高可以降低数据的处理量,进而可以实现高精度的建模。
16.2、当需要仰角或者俯角拍摄物体时,可以调整单轴倾角传感器与数码相机之间的夹角,调整时,向右侧拉动手轮,手轮带动滑动桶沿中心轴和定位柱向右侧滑动,进而滑动桶左端的插齿和插槽分离,同时插齿将压缩弹簧,弹簧发生弹性形变进行收缩,然后旋转手轮,手轮带动滑动桶旋转,滑动桶通过定位柱带动中心轴和刻度环旋转,进而中心轴通过防护壳带动单轴倾角传感器绕中心轴的轴心进行旋转,进而实现对单轴倾角传感器和数码相机之间夹角的调节,同时观察固定套指针与刻度环的相对位置可以确定中心轴旋转的角度,进而可以确定单轴倾角传感器和数码相机之间夹角,单轴倾角传感器与数码相机之间的角度调节方便,可以满足不同角度的设定,进而提高了使用时的便利。
附图说明
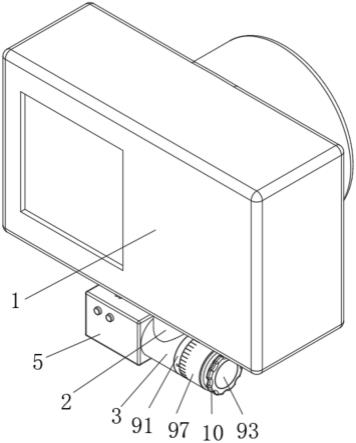
17.图1为本实用新型结构示意图;
18.图2为本实用新型调节单元结构示意图;
19.图3为本实用新型滑动桶的结构示意图;
20.图4为本实用新型的平面结构示意图。
21.图中:1数码相机、2螺柱、3支撑套、4中心轴、5防护壳、6单轴倾角传感器、7单片机、8电池、9调节单元、91固定套、92插槽、93滑动桶、94定位柱、95挡板、96弹簧、97刻度环、10手轮、11防尘板、12定位条、13螺钉、14橡胶垫、15蜂鸣器。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-4,本实施例提供一种技术方案:一种用于高精度空地一体联合建模的手持近景采集装置,包括数码相机1和调节单元9;
24.数码相机1:其下端螺纹连接有螺柱2,使用时手持数码相机1对需要建模的建筑进行拍摄采集图像信息,螺柱2的下端设有支撑套3,螺柱2给支撑套3提供了安装位置,支撑套3的中部通过轴承螺纹连接有中心轴4,支撑套3给中心轴4提供了转动支撑,中心轴4的左端设有防护壳5,防护壳5给内部的零部件提供了防护和安装位置,防护壳5的后侧壁设有单轴倾角传感器6,防护壳5内部的左端设有电池8,电池8给其他电器的工作提供了电能,防护壳5的上侧壁设有蜂鸣器15;螺柱2外弧面的上端设有定位条12,定位条12,定位条12与单轴倾角传感器6平行,方便将单轴倾角传感器6与数码相机1进行平行安装,定位条12下表面的螺纹孔内部螺纹连接有螺钉13,螺钉13的上端延伸出定位条12的上表面,螺钉13的上端设有橡胶垫14,橡胶垫14与数码相机1的下表面接触,螺钉13将橡胶垫14与数码相机1顶紧限制螺柱2的旋转;
25.调节单元9:设置于中心轴4的右端,调节单元9的左端与支撑套3固定连接,调节单元9包括固定套91、插槽92、滑动桶93和定位柱94,固定套91设置于支撑套3的右侧面,固定套91的内弧壁开设有均匀分布的插槽92,滑动桶93滑动连接于中心轴4的右端,滑动桶93左端的插齿分别与插槽92活动插接,定位柱94对称设置于中心轴4外弧面的右端,定位柱94分别与滑动桶93外弧面的长滑槽滑动连接,调节单元9还包括刻度环97,刻度环97为铝合金刻度环,定位柱94远离中心轴4的一端均与刻度环97的内弧壁固定连接,滑动桶93通过定位柱94带动中心轴4和刻度环97旋转,进而中心轴4通过防护壳5带动单轴倾角传感器6绕中心轴4的轴心进行旋转,进而实现对单轴倾角传感器6和数码相机1之间夹角的调节,同时观察固定套91指针与刻度环97的相对位置可以确定中心轴4旋转的角度,进而可以确定单轴倾角传感器6和数码相机1之间夹角,调节单元9还包括挡板95和弹簧96,挡板95滑动连接于滑动桶93的外弧面,挡板95位于定位柱94的左侧,弹簧96活动套接于滑动桶93外弧面的中部,弹簧96位于滑动桶93左端的插齿与挡板95之间,滑动桶93左端的插齿和插槽92分离,同时插齿将压缩弹簧96,弹簧96发生弹性形变进行收缩,挡板95给弹簧96提供了支撑,弹簧96限制滑动桶93的自由移动,滑动桶93的右端设有手轮10,当需要仰角或者俯角拍摄物体时,可以调整单轴倾角传感器6与数码相机1之间的夹角,调整时,向右侧拉动手轮10,手轮10带动滑动桶93沿中心轴4和定位柱94向右侧滑动,旋转手轮10,手轮10带动滑动桶93旋转,调节完毕后,向左推送,手轮10带动滑动桶93左端的插齿与插槽92活动插接,进而限制中心轴4的旋转,刻度环97的右端设有防尘板11,防尘板11与滑动桶93滑动连接,防止灰尘进入到刻度环97的内部;
26.其中:还包括单片机7,单片机7设置于防护壳5的底壁,单轴倾角传感器6和电池8的输出端均电连接单片机7的输入端,蜂鸣器15的输入端电连接单片机7的输出端,在拍摄的同时通过防护壳5前侧面的按键调控单片机7,单片机7工作,单轴倾角传感器6将自身的
倾斜信息转换为电信号传输给单片机7,单轴倾角传感器6的检测轴线与中心轴4的轴线平行,当单轴倾角传感器6处于竖直状态时,单片机7控制蜂鸣器15工作,蜂鸣器15发出响声,然后使用人员进行拍摄,其单轴倾角传感器6和数码相机1存在连接关系,因此调整单轴倾角传感器6和数码相机1之间的夹角,就可以利用蜂鸣器15的响声可以提示拍摄人员数码相机1的拍摄角度以达到预设的角度,当需要垂直拍摄时,数码相机1与单轴倾角传感器6平行,进而蜂鸣器15有蜂鸣声时,数码相机1会处于垂直的状态,进而数码相机1可以进行平行拍摄,然后拍摄时将单轴倾角传感器6调整至垂直转态,蜂鸣器15发出响声,然后数码相机1进行拍摄照片,进而可达到定角度拍摄目的,然后将数码相机1拍摄的图像影像与地面三维激光扫描点云和无人机倾斜摄影测量影像,然后进行处理制作模型,进而实现高精度空地一体联合建模,其数码相机1可以以指定的角度进行拍摄,进而图像清晰高有效使用率高可以降低数据的处理量,提高建模的质量。
27.本实用新型提供的一种用于高精度空地一体联合建模的手持近景采集装置的工作原理如下:使用时手持数码相机1对需要建模的建筑进行拍摄采集图像信息,在拍摄的同时通过防护壳5前侧面的按键调控单片机7,单片机7工作,单轴倾角传感器6将自身的倾斜信息转换为电信号传输给单片机7,单轴倾角传感器6的检测轴线与中心轴4的轴线平行,当单轴倾角传感器6处于竖直状态时,单片机7控制蜂鸣器15工作,蜂鸣器15发出响声,然后使用人员进行拍摄,其单轴倾角传感器6和数码相机1存在连接关系,因此利用蜂鸣器15的响声可以提示拍摄人员数码相机1的拍摄角度以达到预设的角度,当需要垂直拍摄时,数码相机1与单轴倾角传感器6平行,进而蜂鸣器15有蜂鸣声时,数码相机1会处于垂直的状态,进而数码相机1可以进行平行拍摄,当需要仰角或者俯角拍摄物体时,可以调整单轴倾角传感器6与数码相机1之间的夹角,调整时,向右侧拉动手轮10,手轮10带动滑动桶93沿中心轴4和定位柱94向右侧滑动,进而滑动桶93左端的插齿和插槽92分离,同时插齿将压缩弹簧96,弹簧96发生弹性形变进行收缩,然后旋转手轮10,手轮10带动滑动桶93旋转,滑动桶93通过定位柱94带动中心轴4和刻度环97旋转,进而中心轴4通过防护壳5带动单轴倾角传感器6绕中心轴4的轴心进行旋转,进而实现对单轴倾角传感器6和数码相机1之间夹角的调节,同时观察固定套91指针与刻度环97的相对位置可以确定中心轴4旋转的角度,进而可以确定单轴倾角传感器6和数码相机1之间夹角,调节完毕后,向左推送,手轮10带动滑动桶93左端的插齿与插槽92活动插接,进而限制中心轴4的旋转,然后拍摄时将单轴倾角传感器6调整至垂直转态,蜂鸣器15发出响声,然后数码相机1进行拍摄照片,进而可达到定角度拍摄目的,然后将数码相机1拍摄的图像影像与地面三维激光扫描点云和无人机倾斜摄影测量影像,然后进行处理制作模型,进而实现高精度空地一体联合建模,其数码相机1可以以指定的角度进行拍摄,进而图像清晰高有效使用率高可以降低数据的处理量,提高建模的质量。
28.值得注意的是,以上实施例中所公开的数码相机1、单轴倾角传感器6、单片机7和蜂鸣器15,数码相机1可选用型号为dsc-rx1rm2的数码相机,单轴倾角传感器6可选用型号为svt616t单轴倾角传感器,单片机7可选用型号为stm32h743的单片机,蜂鸣器15可选用型号为ls1790-2005tp的蜂鸣器,单片机7控制单轴倾角传感器6和蜂鸣器15工作采用现有技术中常用的方法。
29.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在
其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1