毫米波雷达测试标定装置的制作方法
1.本实用新型涉及雷达模块测试技术领域,具体涉及毫米波雷达测试标定装置。
背景技术:
2.毫米波雷达模块,是工作在毫米波波段(millimeter wave)探测的雷达。通常毫米波是指30~300ghz频域(波长为1~10mm)的。毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点,在毫米波雷达模块生产时需要进行测试标定,使得从而实现雷达坐标的标定。
3.中国专利号cn201822006298.3涉及一种车载雷达标定装置。该装置将第一固定件和第二固定件分别对称安装在与待标定雷达的两侧并与之保持平齐的位置处,将标定物设置在第三固定件上,第一固定件和第二固定件分别利用一等长的绳索与第三固定件相连,从而形成一等腰三角形的连接结构,而待标定雷达则处在该等腰三角形的垂直其底边的中心线上。
4.在对毫米波雷达模块进行测试标定时,需要对反射物进行移动,如上述专利中的雷达标定装置对第一固定件和第二固定件进行移动时,需要通过手调整绳索的长短实现对第一固定件和第二固定件进行移动,导致反射物的移动较为麻烦,进而使得毫米波雷达模块进行测试时过程较为麻烦。因此,亟需设计毫米波雷达测试标定装置来解决上述问题。
技术实现要素:
5.本实用新型的目的是提供毫米波雷达测试标定装置,以解决现有技术中的上述不足之处。
6.为了实现上述目的,本实用新型提供如下技术方案:
7.毫米波雷达测试标定装置,包括滑轨,所述滑轨的内部滑动连接有滑块,所述滑块的顶部通过螺栓连接有反射物,所述滑轨的内部通过轴承连接有主动带轮和从动带轮,所述主动带轮和从动带轮之间传动连接有传动皮带,所述滑块的底部外壁与传动皮带通过螺栓连接,所述滑轨的一侧外壁通过螺栓连接有电机,所述电机的输出轴一端与主动带轮通过键连接,所述反射物的一侧设置有雷达模块。
8.进一步的,所述滑轨的底部外壁通过螺栓连接有支撑架,所述支撑架的一侧设置有控制箱。
9.进一步的,所述支撑架的一侧设置有固定箱,所述固定箱的顶部外壁通过螺栓连接有定夹板,所述固定箱的顶部设置有动夹板,所述固定箱的顶部内壁通过螺栓连接有支板,所述支板的一侧外壁通过轴承连接有螺杆,所述动夹板与螺杆通过螺纹连接,所述螺杆的一端延伸至固定箱的外部焊接有旋钮。
10.进一步的,所述定夹板和动夹板的一侧外壁均设置有凹槽,所述雷达模块位于凹槽的内部。
11.进一步的,所述固定箱的顶部外壁设置有活动槽,所述动夹板位于活动槽的内部。
12.进一步的,所述支板的一侧外壁通过螺栓连接有导柱,所述动夹板与导柱滑动连接。
13.在上述技术方案中,本实用新型提供的毫米波雷达测试标定装置,有益效果为:
14.(1)通过设置的电机、主动带轮和传动皮带,利用电机带动主动带轮进行转动,使得主动带轮通过传动皮带带动滑块和反射无进行移动,使得在对毫米波雷达模块进行测试时,使得反射物的移动更加的方便。
15.(2)通过设置的螺杆、动夹板和定夹板,利用螺杆的转动带动动夹板进行运动,使得动夹板和定夹板能够带动方便的对雷达模块进行固定,因此实现了不同型号尺寸的雷达模块在进行固定时更加方便的效果。
附图说明
16.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
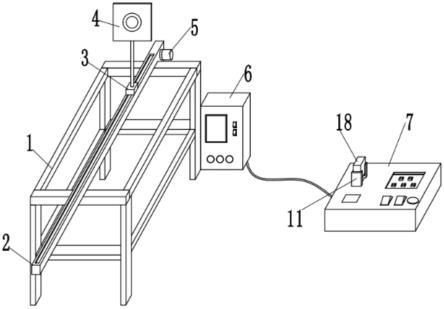
17.图1为本实用新型毫米波雷达测试标定装置实施例提供的整体结构示意图。
18.图2为本实用新型毫米波雷达测试标定装置实施例提供的滑轨结构示意图。
19.图3为本实用新型毫米波雷达测试标定装置实施例提供的动夹块结构示意图。
20.附图标记说明:
21.1支撑架、2滑轨、3滑块、4反射物、5电机、6控制箱、7固定箱、8从动带轮、9主动带轮、10传动皮带、11定夹板、12动夹板、13活动槽、14支板、15螺杆、16旋钮、17凹槽、18雷达模块、19导柱。
具体实施方式
22.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
23.如图1-3所示,本实用新型实施例提供的毫米波雷达测试标定装置,包括滑轨2,滑轨2的内部滑动连接有滑块3,滑块3的顶部通过螺栓连接有反射物4,滑轨2的内部通过轴承连接有主动带轮9和从动带轮8,主动带轮9和从动带轮8之间传动连接有传动皮带10,滑块3的底部外壁与传动皮带10通过螺栓连接,滑轨2的一侧外壁通过螺栓连接有电机5,电机5的输出轴一端与主动带轮9通过键连接,反射物4的一侧设置有雷达模块18。
24.具体的,本实施例中,包括滑轨2,滑轨2的内部滑动连接有滑块3,滑块3的顶部通过螺栓连接有反射物4,通过反射物4的移动来实现对毫米波雷达的测试标定,滑轨2的内部通过轴承连接有主动带轮9和从动带轮8,主动带轮9和从动带轮8之间传动连接有传动皮带10,传动皮带10为同步皮带,主动带轮9和从动带轮8为同步带轮,滑块3的底部外壁与传动皮带10通过螺栓连接,使得传动皮带10转动时带动滑块3在滑轨2的内部进行滑动,进而使得反射物4进行移动,滑轨2的一侧外壁通过螺栓连接有电机5,电机5的输出轴一端与主动带轮9通过键连接,利用电机5带动主动带轮9进行转动,反射物4的一侧设置有雷达模块18,雷达模块18为被测的毫米波雷达装置。
25.本实用新型提供的毫米波雷达测试标定装置,通过设置的电机5、主动带轮9和传
动皮带10,利用电机5带动主动带轮9进行转动,使得主动带轮9通过传动皮带10带动滑块3和反射无进行移动,使得在对毫米波雷达模块18进行测试时,使得反射物4的移动更加的方便。
26.本实用新型提供的另一个实施例中,滑轨2的底部外壁通过螺栓连接有支撑架1,支撑架1的一侧设置有控制箱6,控制箱6的内部具有主控板、电机驱动板和电源模块,控制箱6的外部具有显示模块,电机5与电机驱动板呈电性连接,显示模块、电机驱动板和电源模块均与主控板呈电性连接,具体连接原理为现有技术。
27.本实用新型提供的另一个实施例中,支撑架1的一侧设置有固定箱7,固定箱7的内部具有电路板,电路板上具有通讯模块,固定箱7的顶部外壁通过螺栓连接有定夹板11,固定箱7的顶部设置有动夹板12,通过动夹板12的移动对有雷达模块18进行夹持固定,固定箱7的顶部内壁通过螺栓连接有支板14,支板14的一侧外壁通过轴承连接有螺杆15,动夹板12与螺杆15通过螺纹连接,利用螺杆15的转动带动动夹板12进行移动,使得定夹板11和动夹板12对有雷达模块18进行夹持固定,螺杆15的一端延伸至固定箱7的外部焊接有旋钮16,利用旋钮16方便对螺杆15进行转动,定夹板11和动夹板12的一侧外壁均设置有凹槽17,雷达模块18位于凹槽17的内部,利用凹槽17使得雷达模块18的固定更加的牢固,通过螺杆15的转动带动动夹板12进行运动,使得动夹板12和定夹板11能够带动方便的对雷达模块18进行固定,因此实现了不同型号尺寸的雷达模块18在进行固定时更加方便的效果,固定箱7的顶部外壁设置有活动槽13,动夹板12位于活动槽13的内部,活动槽13为动夹板12提供活动的空间。
28.本实用新型提供的再一个实施例中,支板14的一侧外壁通过螺栓连接有导柱19,动夹板12与导柱19滑动连接,利用动夹板12与导柱19滑动连接,使得动夹板12的运动更加的稳定。
29.具体的,雷达模块18的测试标定步骤如下:
30.打开总电源,打开控制箱6电源开机;
31.使用者将待测雷达模块安装到固定箱7上,将固定箱7内部的通信线路与控制箱6连接;
32.按下雷达模块18的供电开关,给雷达模块18供电;
33.按下执行按钮后,控制箱将与雷达模块18通信,控制箱通过ttl串口协议读取雷达模块18内部存储的数据,并根据此数据产生标定策略;
34.执行标定步骤,控制箱控制电机驱动板带动电机,电机通过传动皮带输出动力带动反射物移动回零点;
35.主控板控制电机驱动板改变反射物运动方向,开始反向移动;
36.反射物从零点出发向待测雷达模块移动,主控板实时监控反射物的运动状态,并记录反射物的运动数据;
37.待测雷达模块18测到反射物移动,将输出测量信息给主控板;
38.主控板结合反射物移动数据(此为标准数据)和待测雷达模块的测量数据生成校准参数;
39.主控板通过串口将新生成的数据写入待测的雷达模块18模块;
40.主控板控制电机驱动板带动电机,控制反射物移动回零点;
41.主控板控制电机驱动板改变反射物运动方向,开始反向移动;
42.主控板监控雷达模块18数据,并与标准距离对比,判断写入数据是否校准到合理误差范围内,如误差范围在既定范围内,则完成退出,如未再既定范围内,则重复校准步骤。
43.本实用新型,可用于标定多普勒雷达,包括cw雷达,fsk雷达;可以调节反射物移动速度,以适应不同的使用场景,可以反射物能够从滑块上进行拆卸,进而调节标准反射物大小,以使用不同灵敏度的雷达传感器;可以根据待测雷达模块的标准响应距离,定制轨道长度;可以进行多次测量,区平均值,减小偶然误差,从而将测量值收敛于小于0.5db的范围;可以通过显示模块,时观察待测模拟器的数值,操作简单易懂,人机交互友好,其采用的arm cortex-m4内核mcu作为主控芯片。当前雷达模拟器设备主要使用延长线方式模拟不符合实际目标运动特点,且现有雷达模拟器一般价格高昂不适合作为生产设备,雷达模拟器一般都针对于车辆fmcw雷达设计,对于多普勒雷达模拟精度较差。现有雷达模拟器对于近处目标(如1m以内)有盲区,本实用新型中大大降低了毫米波雷达模块的标定和目标模拟成本,对比现有模拟器,本实用新型对于多普勒型雷达的模拟效果更佳出众,通过多次测量可以将测量误差收敛在0.5db以内,本实用新型对于中近距离的雷达传感器进行目标模拟时没有测量盲区,图3为固定箱7的夹持部分,用于固定待测雷达模块,使用时将待测雷达模块与标准反射物之间处于同一轴线上,便于标准化操作,固定箱7拥有独立电源可以保证其电源纹波不受主机电源波动的影响,给待测雷达模块提供更稳定的供电,且电源电压可调节,用于匹配不同的雷达模块,固定箱7右侧安装有接口转接板,以匹配不同线序,不同协议的雷达模块。
44.工作原理:当需要对反射物4进行移动时,通过电机5带动主动带轮9进行转动,使得主动带轮9带动皮带进行转动,进而使得皮带带动滑块3在滑轨2的内部进行滑动,使得滑块3带动反射物4进行移动;当需要对雷达模块18进行夹持固定时,将雷达模块18放置在凹槽17的内部,并通过旋钮16对螺杆15进行转动,使得螺杆15带动动夹板12进行运动,使得动夹板12和定夹板11对雷达模块18进行夹持固定。
45.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1