基于龙门架的整车雷达测试系统的制作方法
1.本实用新型涉及雷达性能测试技术领域,尤其涉及一种基于龙门架的整车雷达测试系统。
背景技术:
2.目前,在进行整车雷达性能的测试时,需要测量如图1所示的六个位置的雷达的性能,分别是位置a、位置b、位置c、位置d、位置e和位置f。在具体测试时,有如下两种方式:
3.方式一:
4.待测上述六个位置雷达性能的整车位于转台中间,转台转动带动整车转动,以此控制机器人相对于整车的位置,在整车的某个雷达到达预定测试位置时,由机器人对当前位置的雷达进行性能测试。
5.方式二:
6.测整车不动,通过机器人(机械臂也可以)在其滑动轨道的运动实现对整车不同位置的雷达性能测试。
7.第一种测试方式存在的问题是,转台成本很高,动辄千万级别的费用;所以一般采用第二种测试方式。
8.但是,第二种测试方式存在的问题是,测量精度低,无法满足测试要求,例如,在实际测试时,需要至少满足0.1度的角测试精度。这个问题的根源是,第二种测试方式无法高精度确定机器人的所停的位置,也就是说,机器人很难高精度对准整车上的待测雷达。
9.因此,对本领域的技术人员来说,如何改进现有的整车雷达测试系统,以降低测试成本,提高测试精度,适应测试要求。
技术实现要素:
10.本实用新型旨在提出一种基于龙门架的整车雷达测试系统,以降低测试成本,提高测试精度,适应测试要求。
11.本实用新型提出了一种基于龙门架的整车雷达测试系统,包括:龙门架、雷达测试系统、车辆坐标校准装置和控制装置;所述龙门架设置于微波暗室内;所述雷达测试系统滑动连接于所述龙门架的架体上;所述车辆坐标校准装置用于确定待测整车的每一待测雷达在车辆坐标系下的第一位置坐标;所述控制装置包括信号输入端和信号输出端,所述信号输入端与所述车辆坐标校准装置通过电信号连接,所述信号输出端与所述雷达测试系统通过电信号连接;所述控制装置将所述第一位置坐标转换为龙门架坐标系下的第二位置坐标,并驱动所述雷达测试系统移动至所述第二位置坐标。
12.进一步地,所述基于龙门架的整车雷达测试系统中,所述龙门架包括第一架体、第二架体和活动横梁;所述第一架体和所述第二架体平行且间隔设置;所述第一架体与所述第二架体之间形成的空间用于容纳所述待测整车;所述活动横梁横跨所述第一架体与所述第二架体,且分别与所述第一架体与所述第二架体滑动连接;所述雷达测试系统连接于所
述活动横梁。
13.进一步地,所述基于龙门架的整车雷达测试系统中,所述第一架体顶部和所述第二架体顶部均设置有滑动机构;所述活动横梁通过所述滑动机构分别与所述第一架体和所述第二架体连接。
14.进一步地,所述基于龙门架的整车雷达测试系统中,所述活动横梁还固定有与其垂直的连接架;所述雷达测试系统连接于所述连接架上。
15.进一步地,所述基于龙门架的整车雷达测试系统中,所述连接架为可伸缩连接架;所述连接架的高度在竖直方向可调,安装在连接架末端的整车雷达测试系统还可以俯仰方向可调。
16.进一步地,所述基于龙门架的整车雷达测试系统中,所述车辆坐标校准装置包括摄像头和坐标计算单元;所述摄像头与所述坐标计算单元电连接;所述摄像头用于通过视频方式确定所述待测雷达的位置;所述坐标计算单元用于将所述待测雷达的位置转换为基于所述车辆坐标系的第一位置坐标。
17.进一步地,所述基于龙门架的整车雷达测试系统中,所述车辆坐标校准装置为汽车定位标靶。
18.本实用新型中,车辆坐标校准装置和控制装置可以通过待测整车不同位置的待测雷达的位置,确定雷达测试系统的坐标位置,进而,在龙门架上按照确定的坐标位置滑动的雷达测试系统,高精度对准整车上的待测雷达,进而准确对待测雷达进行性能测试。并且,从设备成本核算,龙门架大概在人民币七八十万左右,车辆坐标校准装置大概是人民币四五万,儿雷达测试系统大概在人民币百万以下,综合来看,相对于千万成本的转台,本实用新型也更加经济实用。
附图说明
19.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本实用新型的实施例,并与说明书一起用于解释本实用新型的原理。
20.图1为现有技术中整车测试六个点位的雷达测试示意图;
21.图2为本实用新型基于龙门架的整车雷达测试系统实施例的结构框图;
22.图3为本实用新型基于龙门架的整车雷达测试系统一个优选实施例的立体结构示意图;
23.图4为图3的俯视图。
具体实施方式
24.应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
25.参照图2,图2为本实用新型基于龙门架的整车雷达测试系统实施例的结构框图。
26.本实施例基于龙门架的整车雷达测试系统包括:龙门架10、雷达测试系统20、车辆坐标校准装置30和控制装置40;龙门架10设置于微波暗室内;雷达测试系统20滑动连接于龙门架10的架体上;车辆坐标校准装置30确定待测整车的每一待测雷达在车辆坐标系下的第一位置坐标;控制装置40包括信号输入端和信号输出端,信号输入端与车辆坐标校准装
置30通过电信号连接,信号输出端与雷达测试系统20通过电信号连接;控制装置40将第一位置坐标转换为龙门架坐标系下的第二位置坐标,并驱动雷达测试系统20移动至第二位置坐标。
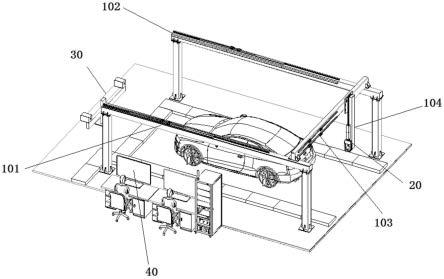
27.参照图3和图4,示出了本实用新型基于龙门架的整车雷达测试系统一个优选实施例。
28.本实施例基于龙门架的整车雷达测试系统包括:龙门架、雷达测试系统20、车辆坐标校准装置30和控制装置40;龙门架10设置于微波暗室60内;雷达测试系统20滑动连接于龙门架的架体上;车辆坐标校准装置30确定待测整车的每一待测雷达在车辆坐标系下的第一位置坐标;控制装置40包括信号输入端和信号输出端,信号输入端与车辆坐标校准装置30通过电信号连接,信号输出端与雷达测试系统20通过电信号连接;控制装置40将第一位置坐标转换为龙门架坐标系下的第二位置坐标,并驱动雷达测试系统20移动至第二位置坐标。
29.在一个实施例中,车辆坐标校准装置30包括摄像头和坐标计算单元;摄像头与所述坐标计算单元电连接。摄像头用于通过视频方式确定所述待测雷达的位置;坐标计算单元用于将待测雷达的位置转换为基于所述车辆坐标系的第一位置坐标。车辆坐标校准装置30可以为汽车定位标靶。
30.更加具体地,参照图2和图3,龙门架10包括第一架体101、第二架体和102活动横梁103;第一架体101和第二架体102平行且间隔设置。第一架体101与第二架体102之间形成的空间用于容纳待测整车50。活动横梁103横跨第一架体101与第二架体102,且分别与第一架体101与第二架体102滑动连接。雷达测试系统20连接于活动横梁103。
31.在该实施例中,第一架体101的顶部和第二架体102的顶部均设置有滑动机构;活动横梁103通过滑动机构分别与第一架体101和第二架体102连接。
32.在该实施例中,雷达测试系统20连接于活动横梁103可以通过如下方式:在活动横梁103还固定有与其垂直的连接架104;雷达测试系统20连接于连接架103上。优选地,连接架103为可伸缩连接架,连接架103的高度在竖直方向可调。
33.本实施例中,车辆坐标校准装置和控制装置可以通过待测整车不同位置的待测雷达的位置,确定雷达测试系统的坐标位置,进而,在龙门架上按照确定的坐标位置滑动的雷达测试系统,高精度对准整车上的待测雷达,进而准确对待测雷达进行性能测试。并且,从设备成本核算,龙门架大概在人民币七八十万左右,车辆坐标校准装置大概是人民币四五万,儿雷达测试系统大概在人民币百万以下,综合来看,相对于千万成本的转台,本实用新型也更加经济实用。
34.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1