一种基于Y波导半波电压的光纤陀螺温漂补偿装置及光纤陀螺的制作方法
本技术涉及光纤陀螺传感,具体涉及基于y波导半波电压的光纤陀螺温漂补偿装置,利用实时锁定的y波导半波电压作为温度测量数据,并以此对光纤陀螺输出的角速率进行温漂建模补偿,该方案可避免采用外接温度传感器测温所导致的温漂补偿滞回现象。
背景技术:
1、光纤陀螺是一种通过测量萨格奈克(sagnac)相位差来获得载体角速率的全固态惯性仪表,是惯性导航系统的核心传感器件。光纤环作为光纤陀螺中的敏感元件,易受环境温度变化引起的shupe效应影响,引入非互易相位差导致测量的角速率产生随温度的漂移,因而需要对光纤环所感受到的温度进行精确测量,以此来建立补偿模型对角速率的漂移进行补偿,从而提升光纤陀螺的测量精度。目前主要是通过在固定光纤环的结构上安装热敏电阻来进行温度测量,该方法的问题是温度变化过程中热敏电阻所测量的温度与光纤环实际温度时间上不匹配,进行温漂补偿会导致角速率随温度变化存在滞回现象,引入补偿偏差,所以对提升光纤陀螺温漂补偿精度有重要意义。
2、集成光学器件y波导与光纤环组成了光纤陀螺核心敏感元件,光经过y波导相位调制后进入光纤环沿两个相反方向传播完成角速率测量,相关研究表明,y波导半波电压vπ与温度t呈明显的相关性,可用如下数学模型描述:vπ=ktt+bt,kt为模型斜率,bt为模型直线截距,因而温度t可通过半波电压vπ来表征:t=(vπ-bt)/kt。由于光纤环的shupe效应,温度变化会导致光纤陀螺输出角速率ω产生偏差,通常利用光纤环温度t的温漂补偿模型为:
3、
4、其中,c1和c2分别是时间一阶导数和二阶导数对应的温补系数,ω0(t)为角速率原始数据,进而可推导出,基于y波导半波电压vπ的温漂补偿模型为:
5、
6、其中,k1=c1/kt,k2=c2/kt。
7、为提升干涉式光纤陀螺的标度因数稳定性,典型的光纤陀螺数字闭环算法中存在针对y波导半波电压的锁定控制,因此能够实时输出y波导的半波电压vπ(t),基于此就可以利用式(2)对输出角速率直接进行温漂补偿,不仅可以抑制外接热敏电阻测温所导致的温漂补偿滞回误差,而且避免了复杂的温度采集电路设计,降低了电路成本。
技术实现思路
1、本实用新型的目的在于提供一种基于y波导半波电压的光纤陀螺温漂补偿方案。利用y波导半波电压表征光纤环的温度,进而建立基于y波导半波电压的光纤陀螺角速率温漂补偿模型,以此抑制由温度测量不匹配所导致的变温过程中角速率补偿滞回现象,同时避免了复杂的温度采集电路设计。
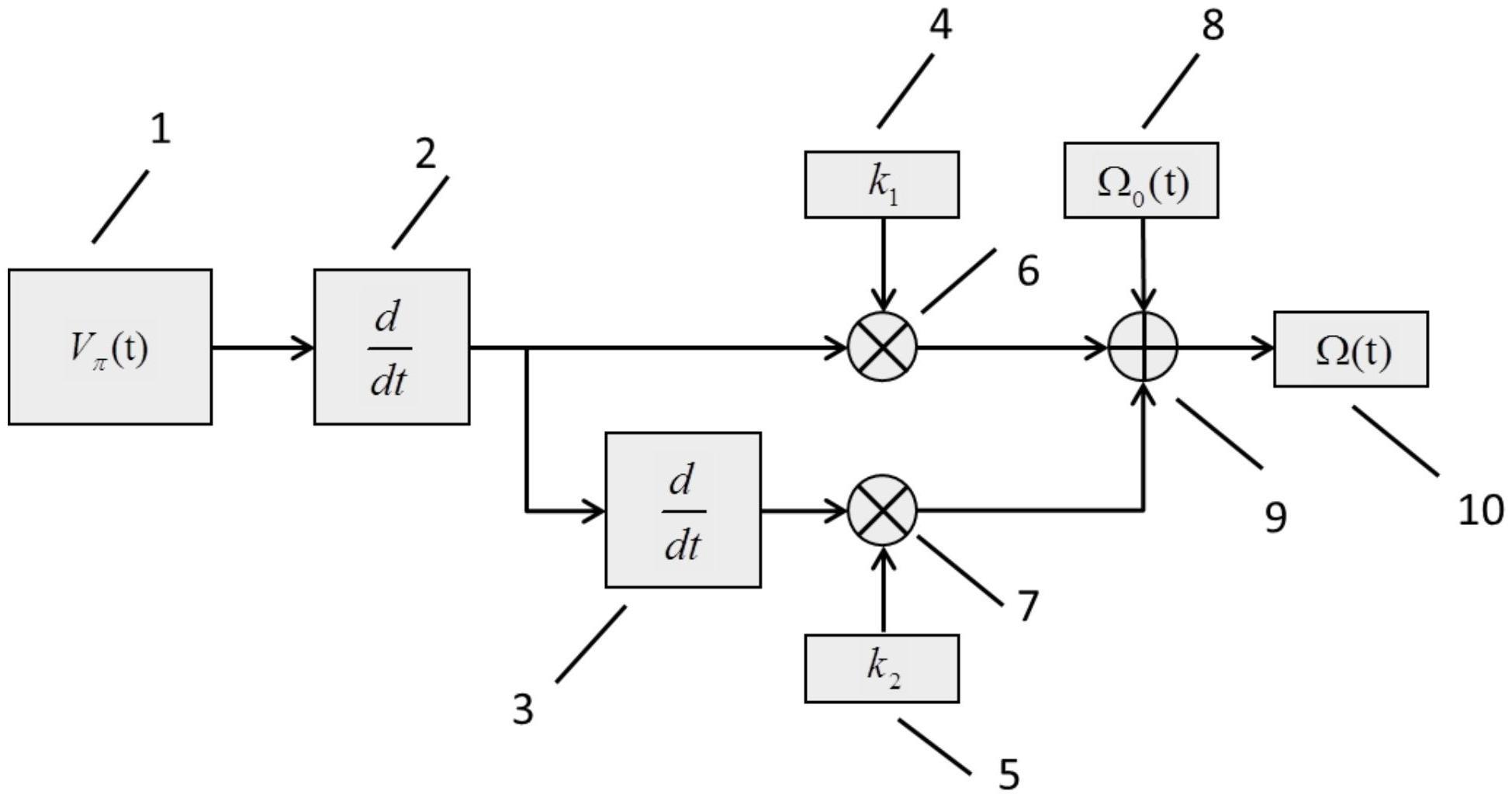
2、为实现上述目的,本实用新型提供了如下技术方案:一种基于y波导半波电压的光纤陀螺温漂补偿方案,该方案基于干涉式光纤陀螺典型的y波导半波电压闭环控制回路,如图1所示,温漂补偿不需增加任何其他温度测量器件,直接利用y波导半波电压闭环控制回路所输出的锁定电压,所涉及温漂补偿算法框图如图2所示,本申请主要保护一种基于y波导半波电压的光纤陀螺温漂补偿装置,包括:y波导半波电压锁定模块、第一时间求导模块、第二时间求导模块、第一参数寄存器、第二参数寄存器、第一乘法器、第二乘法器、累加器、初始角速率寄存器、补偿后角速率寄存器;所述y波导半波电压锁定模块连接第一时间求导模块,用于将所述y波导半波电压锁定模块输出的实时半波电压信号,输入所述第一时间求导模块,所述第一时间求导模块一路通过第一乘法器与所述第一参数寄存器中的第一参数相乘得到第一乘数;所述第一时间求导模块输出的另一路进入所述第二时间求导模块,所述第二时间求导模块的输出结果通过第二乘法器与所述第二参数寄存器中的第二参数相乘得到第二乘数,所述第一乘数、所述第二乘数和所述初始角速率寄存器中的角速率一同进入所述累加器进行累加,所述累加器连接所述补偿后角速率寄存器,所述补偿后角速率寄存器用于存储所述累加器累加的结果。
3、进一步地,所述的y波导半波电压锁定模块是干涉式闭环光纤陀螺控制电路中的半波电压锁定模块。
4、更进一步,所述y波导半波电压锁定模块输出y波导半波电压vπ,所述y波导半波电压与温度t的关系为:vπ=ktt+bt,kt为模型斜率,bt为模型直线截距,温度变化会导致光纤陀螺输出角速率ω产生偏差为
5、
6、其中,c1和c2分别是时间一阶导数和二阶导数对应的温补系数,ω0(t)为所述初始角速率寄存器中存储的角速率原始数据,基于y波导半波电压vπ的温漂补偿模型为:
7、
8、其中,k1=c1/kt,k2=c2/kt;其中,所述第一参数寄存器中的第一参数为温漂补偿模型中的一阶时间导数项的系数k1;
9、进一步地,所述的第二参数寄存器中的第二参数为所述温漂补偿模型中的二阶时间导数项的系数k2。
10、进一步地,所述的初始角速率寄存器中存储的角速率原始数据为光纤陀螺角速度解算控制闭环输出的数据。
11、除此以外,本申请还保护一种光纤陀螺,包括所述的基于y波导半波电压的光纤陀螺温漂补偿装置。
12、与现有技术相比,本实用新型的有益效果有:本实用新型保护一种基于y波导半波电压的光纤陀螺温漂补偿装置及光纤陀螺;适用于光纤陀螺温漂建模补偿,能够通过利用实时锁定的y波导半波电压进行光纤环温度测量,建立关于半波电压的角速率温漂补偿模型,以此来抑制外接热敏电阻测温所导致的温漂补偿滞回误差,同时舍弃了复杂的温度采集电路设计,降低了电路成本。
技术特征:
1.一种基于y波导半波电压的光纤陀螺温漂补偿装置,包括:y波导半波电压锁定模块、第一时间求导模块、第二时间求导模块、第一参数寄存器、第二参数寄存器、第一乘法器、第二乘法器、累加器、初始角速率寄存器、补偿后角速率寄存器;所述y波导半波电压锁定模块连接第一时间求导模块,用于将所述y波导半波电压锁定模块输出的实时半波电压信号,输入所述第一时间求导模块,所述第一时间求导模块一路通过第一乘法器与所述第一参数寄存器中的第一参数相乘得到第一乘数;所述第一时间求导模块输出的另一路进入所述第二时间求导模块,所述第二时间求导模块的输出结果通过第二乘法器与所述第二参数寄存器中的第二参数相乘得到第二乘数,所述第一乘数、所述第二乘数和所述初始角速率寄存器中的角速率一同进入所述累加器进行累加,所述累加器连接所述补偿后角速率寄存器,所述补偿后角速率寄存器用于存储所述累加器累加的结果。
2.如权利要求1所述的基于y波导半波电压的光纤陀螺温漂补偿装置,所述的y波导半波电压锁定模块是干涉式闭环光纤陀螺控制电路中的半波电压锁定模块。
3.如权利要求1所述的基于y波导半波电压的光纤陀螺温漂补偿装置,所述y波导半波电压锁定模块输出y波导半波电压vπ,所述y波导半波电压与温度t的关系为:vπ=ktt+bt,kt为模型斜率,bt为模型直线截距,温度变化会导致光纤陀螺输出角速率ω产生偏差为
4.如权利要求3所述的基于y波导半波电压的光纤陀螺温漂补偿装置,所述的第二参数寄存器中的第二参数为所述温漂补偿模型中的二阶时间导数项的系数k2。
5.如权利要求3所述的基于y波导半波电压的光纤陀螺温漂补偿装置,所述的初始角速率寄存器中存储的角速率原始数据为光纤陀螺角速度解算控制闭环输出的数据。
6.一种光纤陀螺,其特征在于,包括权利要求1-5中任一项所述的基于y波导半波电压的光纤陀螺温漂补偿装置。
技术总结
本技术公开了一种基于Y波导半波电压的光纤陀螺温漂补偿装置,用于将所述Y波导半波电压锁定模块输出的实时半波电压信号,输入所述第一时间求导模块,所述第一时间求导模块一路通过第一乘法器与所述第一参数寄存器中的第一参数相乘得到第一乘数;所述第一时间求导模块输出的另一路进入所述第二时间求导模块,所述第二时间求导模块的输出结果通过第二乘法器与所述第二参数寄存器中的第二参数相乘得到第二乘数,所述第一乘数、所述第二乘数和所述初始角速率寄存器中的角速率一同进入所述累加器;本技术可抑制外接热敏电阻测温所导致的温漂补偿滞回误差。
技术研发人员:李伟,张云赫,郭子赟
受保护的技术使用者:北京同方华创科技有限公司
技术研发日:20221103
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!