基于RFID定位导航的标签布局阵列结构
基于rfid定位导航的标签布局阵列结构
技术领域
1.本实用新型涉及无线通信定位技术领域,具体为基于rfid定位导航的标签布局阵列结构。
背景技术:
2.现有室内导航定位技术主要是视觉定位,红外线定位,超宽带定位,wifi定位,蓝牙定位等。视觉定位和红外定位技术容易受到视距,视线的影响,对障碍物多的室内环境来说具有很大的挑战;超宽带定位并且成本很高;wifi定位精度低,信号容易受到干扰;蓝牙定位精度低和视线要求高。
技术实现要素:
3.本实用新型的目的在于提供基于rfid定位导航的标签布局阵列结构,以解决上述背景技术中提出的现有室内导航定位技术主要是视觉定位,红外线定位,超宽带定位,wifi定位,蓝牙定位等。视觉定位和红外定位技术容易受到视距,视线的影响,对障碍物多的室内环境来说具有很大的挑战;超宽带定位并且成本很高;wifi定位精度低,信号容易受到干扰;蓝牙定位精度低和视线要求高的问题。
4.为实现上述目的,本实用新型提供如下技术方案:基于rfid定位导航的标签布局阵列结构,包括机器人、地面标签区域和电子标签布局阵列结构,所述机器人上安装有读写器和位于读写器上方的近端服务器,所述地面标签区域由设置在地面上的多个地面标签组成,所述电子标签布局阵列结构由十一个电子标签组成,十一个所述电子标签呈从内到外依次分布一个、四个、六个的空间阵列,机器人上安装读写器和近端服务器,机器人移动时,读写器通过感应地面标签区域的地面标签,获取采集地面标签的rss能量值,利用rfid地面标签指纹技术,先建立指纹数据库,利用获取采集到的地面标签的rss能量值与地图中的rss比较,获取能量与位置关系,指纹数据库建立完成后,利用rfid定位技术,读写器通过电子标签布局阵列结构的电子标签,获取采集电子标签的信号强度,利用rfid定位技术,并通过近端服务器处理,根据能量增强情况进行路由决策,实现机器人到达目标位置,并通过rfid地面标签指纹技术获取机器人实时位置信息,达到定位机器人目的,同时机器人在基于能量导航找到需要服务的目标位置,并精确进行服务定位。
5.作为本实用新型的一种优选技术方案,所述地面标签区域为边长2m的正方形,多个所述地面标签为空间网格结构,每个地面标签间间隔均为10cm。
6.作为本实用新型的一种优选技术方案,所述读写器与多个地面标签和十一个电子标签信号连接,所述读写器与近端服务器电性连接,读写器获取采集地面标签的rss能量值和获取采集电子标签的信号强度,近端服务器对读写器获取采集的信号进行处理。
7.作为本实用新型的一种优选技术方案,中心的一个所述电子标签为中心点,中间的四个所述电子标签为正四边形结构,外边的六个所述电子标签为正六边形结构,电子标签构成定位服务区域,这种布局利用相互修正,中心能量最强,距离越远能量越弱,距离目
标点20cm时,机器人实现精确定位和导航。
8.作为本实用新型的一种优选技术方案,所述读写器的读写方向正对地面,读写器获取地面上的地面标签或者电子标签的rss能量。
9.与现有技术相比,本实用新型的有益效果是:提出了使用rfid定位技术,结合rfid地面标签指纹技术,电子标签阵列设计,通过rss能量变化进行决策,实现室内目标物体的低成本、高精度的定位,从而实现室内机器人在复杂室内环境中为人们提供智能充电,视频投放及发现服务对象等智能服务功能,为智慧家庭提供一套经济合理的室内定位技术。
附图说明
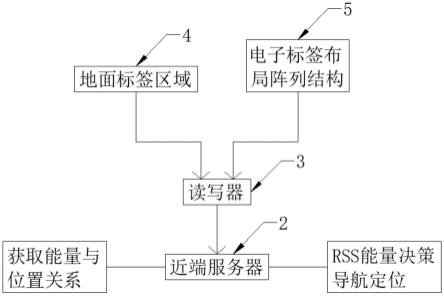
10.图1为本实用新型的方框图;
11.图2为本实用新型电子标签布局阵列结构的示意图;
12.图3为本实用新型地面标签区域的示意图;
13.图4为本实用新型机器人的结构示意图。
14.图中:1、机器人;2、近端服务器;3、读写器;4、地面标签区域;5、电子标签布局阵列结构;6、地面标签;7、电子标签。
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
16.实施例1:请参阅图1、图3和图4,本实用新型提供了基于rfid定位导航的标签布局阵列结构,包括机器人1和地面标签区域4,机器人1上安装有读写器3和位于读写器3上方的近端服务器2,地面标签区域4由设置在地面上的多个地面标签6组成。
17.优选的,地面标签区域4为边长2m的正方形,多个地面标签6为空间网格结构,每个地面标签6间间隔均为10cm。
18.优选的,读写器3与多个地面标签6信号连接,读写器3与近端服务器2电性连接。
19.优选的,读写器3的读写方向正对地面。
20.本技术实施例在使用时:地面构建了一个正方形的4m2地面标签区域4,每个地面标签6距离10cm,形成空间网格,该空间网格又称为指纹;原理是利用rfid地面标签指纹技术,先在近端服务器2中建立指纹数据库,指纹数据库又称为rss能量地图,之后通过实时机器人1运动,在机器人1上安装好一个地面标签6的读写器3和近端服务器2,读写器3获取采集到的rss,通过近端服务器2处理后得到实时rss能量值并与地图中的rss比较,获取能量与位置关系;rss为接收信号强度,信号源距离近,信号就强,距离远信号就弱。
21.实施例2:请参阅图1、图2和图4,本实用新型提供了基于rfid定位导航的标签布局阵列结构,包括机器人1和电子标签布局阵列结构5,机器人1上安装有读写器3和位于读写器3上方的近端服务器2,电子标签布局阵列结构5由十一个电子标签7组成,十一个电子标签7呈从内到外依次分布一个、四个、六个的空间阵列。
22.优选的,读写器3与多个地面标签6和十一个电子标签7信号连接,读写器3与近端服务器2电性连接。
23.优选的,中间的一个电子标签7为中心点,中间的四个电子标签7为正四边形结构,
外边的六个电子标签7为正六边形结构。
24.优选的,读写器3的读写方向正对地面。
25.本技术实施例在使用时:电子标签布局阵列结构5由十一个电子标签7组成,十一个电子标签7呈从内到外依次分布一个、四个、六个的空间阵列,中心的一个电子标签7为中心点,中间的四个电子标签7为正四边形结构,外边的六个电子标签7为正六边形结构,构成定位服务区域,这种布局利用相互修正,中心能量最强,距离越远能量越弱,距离目标点20cm时,机器人1实现精确定位和导航;在机器人1上安装好一个电子标签7的读写器3和近端服务器2,读写器3用于采集电子标签7的rss,并通过近端服务器2处理,根据能量增强情况进行路由决策,实现机器人1到达目标位置,并通过rfid地面标签指纹技术获取机器人1实时位置信息,达到定位机器人1的目的,同时机器人1在基于能量导航找到需要服务的目标位置,并精确进行服务定位,实现室内目标物体的低成本、高精度的定位;rss为接收信号强度,信号源距离近,信号就强,距离远信号就弱。
26.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1