一种断路器的机械磨合设备的制作方法
1.本实用新型涉及一种机械磨合设备,具体涉及一种断路器的机械磨合设备。
背景技术:
2.断路器是指能够关合、承载和开断正常回路条件下的电流并能关合、在规定的时间内承载和开断异常回路条件下的电流的开关装置,断路器可用来分配电能,不频繁地启动异步电动机,对电源线路及电动机等实行保护,当它们发生严重的过载或者短路及欠压等故障时能自动切断电路,其功能相当于熔断器式开关与过欠热继电器等的组合。而且在分断故障电流后一般不需要变更零部件。目前,已获得了广泛的应用。
3.机械磨合是指在机器装配后使用前,为了使配合件正常稳定运转的一种措施,也称跑合,机械磨合是一种有意安排的磨损过程,同样在断路器装配完成后需要对其进行机械磨合,尤其是对转动手柄的磨合,采用人工磨合的话,不仅费时费力,而且效率低下,而目前只有半自动的对转动手柄进行磨合的机械设备,使用起来并不方便,故需要一种全自动的机械磨合设备对断路器的转动手柄进行机械磨合。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种断路器的机械磨合设备。
5.为实现上述目的,本实用新型提供了如下技术方案:包括将断路器进行输送的输送带、对输送带上的断路器进行固定的固定装置、对断路器进行检测的检测装置、将断路器进行磨合的磨合装置、将输送带与磨合装置上的断路器进行相互转移的转移装置;磨合装置包括磨合板、固定机构、左侧板、右侧板、左气缸及右气缸,磨合板上设置有用于容纳断路器的容纳位置,固定机构设置于磨合板并对处于容纳位置的断路器进行固定,左侧板与右侧板分别设置于磨合板的左侧与右侧,左气缸设置于左侧板并驱动设置左推件沿靠近及远离容纳位置的方向移动,右气缸设置于右侧板并驱动设置右推件沿靠近及远离容纳位置的方向移动,位于容纳位置两侧的左推件与右推件构成转动手柄的左右转动,所述的输送带具有第一工位、第二工位及第三工位,固定装置设置于第一工位,检测装置设置于第二工位,转移装置具有将第二工位的断路器转移至容纳位置的转入状态及将容纳位置的断路器转移至第三工位的转出状态,检测装置为市面常规的视觉检测装置,属于常规技术故不详细展开描述,转移装置为机械臂。
6.通过采用上述技术方案,当断路器装配完成后,由输送带将断路器进行输送,达到第二工位,进行检测,与此同时固定装置将下一个断路器固定在第一工位,防止干扰处于第二工位的断路器,而后转移装置将处于第二工位的断路器转移至容纳位置,由固定机构将断路器固定,而后左气缸驱动左推件向右移动,从而推动断路器的转动手柄向右转动,而后左推件回位,右气缸驱动右推件向左移动,从而推动断路器的转动手柄向左移动,而后右推件回位,重复左推件与右推件的往复,从而起到对转动手柄的机械磨合,当磨合完毕后,固
定机构解除对该断路器的固定,而后转移装置再将处于容纳位置的断路器移动至第三工位,由输送带将断路器移出,完成转动手柄机械磨合的全自动化处理,无需额外的人工进行辅助,处理效率高,且省时省力。
7.本实用新型进一步设置为:所述的固定机构包括第一推动气缸、第一固定块、第二推动气缸及第二固定块,第一推动气缸设置于磨合板并位于容纳位置的一侧,第一固定块固定设置于磨合板且第一固定块位于容纳位置相对第一推动气缸的另一侧,第二推动气缸设置于磨合板并位于容纳位置相对第一推动气缸的相邻侧,第二固定块固定设置于磨合板且第二固定块位于容纳位置相对第二推动气缸的另一侧,第一推动气缸、第一固定块、第二推动气缸及第二固定块构成对处于容纳位置断路器的固定。
8.通过采用上述技术方案,当需要对容纳位置的断路器进行固定时,第一推动气缸推动断路器向第一固定块移动直至相抵,同理第二推动气缸推动断路器向第二固定块移动直至相抵,完成对断路器的固定
9.本实用新型进一步设置为:所述的固定装置包括固定气缸与抵押块,固定气缸设置于第一工位的一侧且固定气缸的驱动方向垂直于输送带的输送方向,抵押块位于第一工位相对固定气缸的另一侧,第一工位前端设置有沿竖向移动的限位块,限位块、固定气缸及抵押块形成对位于第一工位断路器的固定。
10.通过采用上述技术方案,当需要固定装置将断路器固定时,固定气缸驱动断路器向抵押块移动直至与抵押块相抵,与此同时限位块向上移动至与断路器相抵,此时输送带与该断路器相互滑移,即断路器被固定,无法移动。
11.本实用新型进一步设置为:所述的固定机构、左气缸及右气缸的数量为多个,磨合板上设置有多个容纳位置。
12.通过采用上述技术方案,多个容纳位置的设置使得能同时对多个断路器进行磨合,提高工作效率。
13.本实用新型进一步设置为:所述的磨合板上设置有竖向气缸,竖向气缸驱动脱扣头沿竖向移动且脱扣头位于断路器上方。
14.通过采用上述技术方案,当磨合完毕后,脱扣头向下移动,按压断路器上的脱扣按键,使得转动手柄回中,即初始位置,随后将断路器移出。
附图说明
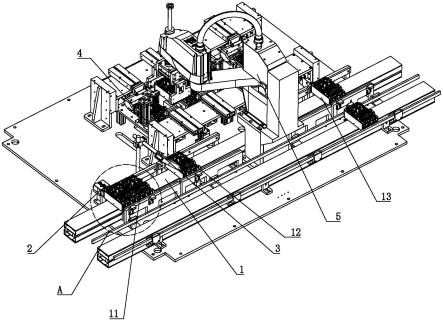
15.图1为本实用新型整体的结构示意图;
16.图2为本实用新型局部放大图a;
17.图3为本实用新型磨合装置及相关元件的结构示意图;
18.图4为本实用新型局部放大图b。
具体实施方式
19.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
21.如图1-4所示,本实用新型公开了一种断路器的机械磨合设备,包括将断路器进行输送的输送带1、对输送带1上的断路器进行固定的固定装置2、对断路器进行检测的检测装置3、将断路器进行磨合的磨合装置4、将输送带1与磨合装置4上的断路器进行相互转移的转移装置5;磨合装置4包括磨合板41、固定机构42、左侧板43、右侧板44、左气缸431及右气缸441,磨合板41上设置有用于容纳断路器的容纳位置45,固定机构42设置于磨合板41并对处于容纳位置45的断路器进行固定,左侧板43与右侧板44分别设置于磨合板41的左侧与右侧,左气缸431设置于左侧板43并驱动设置左推件432沿靠近及远离容纳位置45的方向移动,右气缸441设置于右侧板44并驱动设置右推件442沿靠近及远离容纳位置45的方向移动,位于容纳位置45两侧的左推件432与右推件442构成转动手柄的左右转动,输送带1具有第一工位11、第二工位12及第三工位13,固定装置2设置于第一工位11,检测装置3设置于第二工位12,转移装置5具有将第二工位12的断路器转移至容纳位置45的转入状态及将容纳位置45的断路器转移至第三工位13的转出状态,检测装置3为市面常规的视觉检测装置3,属于常规技术故不详细展开描述,转移装置5为机械臂,无需额外的人工进行辅助,处理效率高,且省时省力。
22.固定机构42包括第一推动气缸421、第一固定块422、第二推动气缸423及第二固定块424,第一推动气缸421设置于磨合板41并位于容纳位置45的一侧,第一固定块422固定设置于磨合板41且第一固定块422位于容纳位置45相对第一推动气缸421的另一侧,第二推动气缸423设置于磨合板41并位于容纳位置45相对第一推动气缸421的相邻侧,第二固定块424固定设置于磨合板41且第二固定块424位于容纳位置45相对第二推动气缸423的另一侧,第一推动气缸421、第一固定块422、第二推动气缸423及第二固定块424构成对处于容纳位置45断路器的固定,当需要对容纳位置45的断路器进行固定时,第一推动气缸421推动断路器向第一固定块422移动直至相抵,同理第二推动气缸423推动断路器向第二固定块424移动直至相抵,完成对断路器的固定
23.固定装置2包括固定气缸21与抵押块22,固定气缸21设置于第一工位11的一侧且固定气缸21的驱动方向垂直于输送带1的输送方向,抵押块22位于第一工位11相对固定气缸21的另一侧,第一工位11前端设置有沿竖向移动的限位块23,限位块23、固定气缸21及抵押块22形成对位于第一工位11断路器的固定,当需要固定装置2将断路器固定时,固定气缸21驱动断路器向抵押块22移动直至与抵押块22相抵,与此同时限位块23向上移动至与断路器相抵,此时输送带1与该断路器相互滑移,即断路器被固定,无法移动。
24.固定机构42、左气缸431及右气缸441的数量为多个,磨合板41上设置有多个容纳位置45,多个容纳位置45的设置使得能同时对多个断路器进行磨合,提高工作效率。
25.磨合板41上设置有竖向气缸46,竖向气缸46驱动脱扣头47沿竖向移动且脱扣头47位于断路器上方,当磨合完毕后,脱扣头47向下移动,按压断路器上的脱扣按键,使得转动手柄回中,即初始位置,随后将断路器移出。
26.具体实施例:当断路器装配完成后,由输送带1将断路器进行输送,达到第二工位12,进行检测,与此同时固定装置2将下一个断路器固定在第一工位11,防止干扰处于第二工位12的断路器,而后转移装置5将处于第二工位12的断路器转移至容纳位置45,由固定机构42将断路器固定,而后左气缸431驱动左推件432向右移动,从而推动断路器的转动手柄向右转动,而后左推件432回位,右气缸441驱动右推件442向左移动,从而推动断路器的转动手柄向左移动,而后右推件442回位,重复左推件432与右推件442的往复,从而起到对转动手柄的机械磨合,当磨合完毕后,固定机构42解除对该断路器的固定,而后转移装置5再将处于容纳位置45的断路器移动至第三工位13,由输送带1将断路器移出,完成转动手柄机械磨合的全自动化处理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1