一种无人机抗干扰高精度导航装置的制作方法
一种无人机抗干扰高精度导航装置
1.【技术领域】
2.本实用新型涉及导航模块技术领域,特别是一种无人机抗干扰高精度导航装置。
3.
背景技术:
4.现有技术中,无人机导航模块多采用gps芯片结合地磁传感器、气压计等传感器进行融合导航,电子元件之间容易产生相互干扰。
5.为此,公开号为cn212674172u的实用新型公开了一种无人机抗干扰高精度导航模块,包括天线模块和滤波器件,所述天线模块与滤波器件电气连接,无人机抗干扰高精度导航模块通过定位模块会自动工作,会将来天线模块接收的信号进行过滤、放大、再抑制放大后的带外信号,再让定位模块的gps芯片进行处理。当连接飞行控制器时,通过can收发模块收发飞行控制器数据,处理器模块处理来自气压计、定位模块、rm3100的工业级地磁传感器、及安全开关的数据进行打包,发送给飞行控制器,并根据飞行控制指令号,控制安全开关的led颜色变化、蜂鸣器音色及进行传感器校准,从而实现对对飞行控制器的融合定位导航、状态指示、上锁与解锁功能。
6.上述专利存在以下问题:无人机机身往往比较小,电气设备复杂,将所有电子元件都设置在一个电路板上,电子元件不可随意分载,各个电子元件容易受到某些电子元件的干扰以及对某些电子元件长期触碰可能造成电子元件的松动。
7.因此现有技术并不能满足我们的需要。
8.
技术实现要素:
9.为解决上述问题,本实用新型提供一种抗干扰效果好的无人机抗干扰高精度导航装置。
10.为实现上述目的,本实用新型提供如下技术方案:
11.一种无人机抗干扰高精度导航装置,包括天线模块和与所述天线模块电连接的滤波模块,还包括第一电路板和与所述第一电路板可拆卸连接的第二电路板,所述天线模块和滤波模块设置在所述第一电路板上,所述第一电路板上还设置有与所述滤波模块电连接的定位模块、与所述定位模块电连接的处理器单元以及与所述处理器单元电连接的收发模块,所述第二电路板上设置有安全开关,当所述第一电路板和第二电路板连接时所述安全开关与所述处理器单元电连接,所述第一电路板或第二电路板上设置有与所述处理器单元电连接的传感器。
12.作为优选实施方式,进一步限定为:所述第一电路板上设置有第一接头,所述第二电路板上设置有与所述第一接头相适配的第二接头,当所述传感器设置在所述第二电路板上时,所述传感器和安全开关通过所述第一接头和第二接头与所述处理器单元电连接。
13.作为优选实施方式,进一步限定为:所述传感器包括设置在所述第一电路板上的惯性导航传感器、设置在所述第二电路板上的蜂鸣器以及设置在所述第一电路板或第二电路板上的地磁传感器和气压传感器;当所述地磁传感器和气压传感器设置在所述第二电路板上时,所述地磁传感器和气压传感器以及所述安全开关和蜂鸣器均通过所述第一接头和第二接头与所述处理器单元电连接。
14.作为优选实施方式,进一步限定为:所述传感器包括设置在所述第二电路板上的惯性导航传感器以及设置在所述第一电路板或第二电路板上的地磁传感器和气压传感器;当所述地磁传感器和气压传感器设置在所述第二电路板上时,所述地磁传感器和气压传感器以及所述安全开关和惯性导航传感器均通过所述第一接头和第二接头与所述处理器单元电连接。
15.作为优选实施方式,进一步限定为:还包括保护壳,所述第一电路板设置在所述保护壳内,所述保护壳开设有供所述第一接头或供所述第二电路板露出的开口使得所述第二电路板设置在所述保护壳内或设置在所述保护壳上。
16.作为优选实施方式,进一步限定为:所述保护壳包括第一壳体和第二壳体,所述第一壳体和第二壳体盖合形成容纳所述第一电路板的容纳腔,所述开口设置在所述第二壳体上。
17.作为优选实施方式,进一步限定为:当所述地磁传感器和气压传感器设置在所述第二电路板上时,所述地磁传感器和气压传感器设置在所述第二电路板位于所述第二接头一侧的端面上或背离所述第二接头一侧的端面上,所述蜂鸣器设置在所述第二电路板背离所述第二接头一侧的端面上或位于所述第二接头一侧的端面上。
18.作为优选实施方式,进一步限定为:所述第二电路板背离所述第二电路板一侧端面上还设置有tf/sd卡槽。
19.作为优选实施方式,进一步限定为:所述第二电路板上设置有若干个第一螺孔,所述第一电路板上设置有装配后与所述第一螺孔相对准的第二螺孔,所述第一电路板和第二电路板通过螺栓固定连接在一起。
20.作为优选实施方式,进一步限定为:所述第一电路板上还设置有与所述处理器单元电连接的输出接口。
21.本实用新型的有益效果是:本实用新型将容易干扰其他电子元件的传感器、电子元件和安全开关移出并设置在第二电路板上,并且第二电路板与设置有天线模块和滤波模块的第一电路板可拆卸连接,电子元件可以根据需要随意设置在第一电路板或第二电路板上,有效避免容易干扰其他电子元件的传感器或电子元件干扰天线模块和滤波模块的正常工作,有效提高导航装置的抗干扰能力,以及有效避免长时间按压安全开关,导致出现天线模块、滤波模块等设置在第一电路板上的电子元件松动,进而出现开焊或脱落连接等问题,进一步提高导航装置的抗干扰能力。
22.【附图说明】
23.图1是本实用新型的结构示意图之一;
24.图2是本实用新型的结构示意图之二;
25.图3是本实用新型的分解图;
26.图4是本实用新型的横向剖视图;
27.图5是第一电路板的结构示意图之一;
28.图6是第一电路板的结构示意图之二;
29.图7是第二电路板的结构示意图之一;
30.图8是第二电路板的结构示意图之二;
31.图9是本实用新型实施例一的连接框图;
32.图10是本实用新型实施例二的连接框图;
33.图11是本实用新型实施例三的连接框图;
34.图12是本实用新型实施例四的连接框图;
35.图13是本实用新型的电路原理图。
36.【具体实施方式】
37.以下结合附图和具体实施方式对本实用新型作进一步详细说明:
38.实施例一
39.如附图1至附图9和附图13所示,一种无人机抗干扰高精度导航装置,包括天线模块1和与所述天线模块1电连接的滤波模块2,还包括第一电路板100和与所述第一电路板100可拆卸连接的第二电路板200,所述天线模块1和滤波模块2设置在所述第一电路板100上,所述第一电路板100上还设置有与所述滤波模块2电连接的定位模块4、与所述定位模块4电连接的处理器单元7以及与所述处理器单元7电连接的收发模块8,所述第二电路板200上设置有安全开关3,当所述第一电路板100和第二电路板200连接时所述安全开关3与所述处理器单元7电连接,所述第一电路板100或第二电路板200上设置有与所述处理器单元7电连接的传感器。将容易干扰其他电子元件的传感器、电子元件和安全开关3移出并设置在第二电路板200上,并且第二电路板200与设置有天线模块1和滤波模块2的第一电路板100可拆卸连接,电子元件可以根据需要随意设置在第一电路板100或第二电路板200上,有效避免容易干扰其他电子元件的传感器或电子元件干扰天线模块1和滤波模块2的正常工作,如蜂鸣器,有效提高导航装置的抗干扰能力,以及有效避免长时间按压安全开关3,导致出现天线模块1、滤波模块2等设置在第一电路板100上的电子元件松动,进而出现开焊或脱落连接等问题,进一步提高导航装置的抗干扰能力。
40.如附图1至附图8所示,在本实施例中,所述第一电路板100上设置有第一接头101,所述第二电路板200上设置有与所述第一接头101相适配的第二接头201,当所述传感器设置在所述第二电路板200上时,所述传感器和安全开关3通过所述第一接头101和第二接头201与所述处理器单元7电连接。所述安全开关3包括按键开关、led等。所述第一接头101和第二接头201可徒手快速拆装,通过所述第一接头101和第二接头201的快速拆装即可实现所述第一电路板100和第二电路板200的快速装配、拆卸以及第二电路板200的快速更换,即可实现各种传感器、模块的随意选择以及组合使用,更进一步来说,所述第一接头101和第二接头201为板对板连接器。所述第一接头101和第二接头201连接在一起后形成通路,所述传感器和安全开关3即可与所述处理器单元7电连接。
41.如附图1至附图8所示,在本实施例中,所述传感器包括设置在所述第一电路板100上的惯性导航传感器51、设置在所述第二电路板200上的蜂鸣器52以及设置在所述第一电路板100或第二电路板200上的地磁传感器5和气压传感器6;当所述地磁传感器5和气压传感器6设置在所述第二电路板200上时,所述地磁传感器5和气压传感器6以及所述安全开关3和蜂鸣器52均通过所述第一接头101和第二接头201与所述处理器单元7电连接。也即所述第一接头101和第二接头201连接在一起后形成通路,所述地磁传感器5、气压传感器6、所述安全开关3和蜂鸣器52即可与所述处理器单元7电连接。
42.更进一步来说,滤波模块2采用的lna+saw滤波的两重滤波或述saw+lna+saw滤波三重滤波等方式,可以选用的是b39152b3421u410等的saw滤波器;所述地磁传感器5可以采
用rm3100工业级地磁传感器等传感器,所述收发模块8采用是uav can总线等方式。
43.如附图1至附图8所示,更进一步来说,在实施例一中,所述地磁传感器5和气压传感器6设置在所述第二电路板200上,使得所述蜂鸣器52、安全开关3、地磁传感器5和气压传感器6均设置在所述第二电路板200上,从而使得蜂鸣器52、安全开关3远离第一电路板100,有效避免蜂鸣器52的震动以及其电磁式蜂鸣器的线圈干扰天线模块1、滤波模块2和定位模块4等设置在所述第一电路板100上的电子元件的正常工作,有效提高导航装置的抗干扰能力,同时有效避免长时间按压安全开关3,导致出现天线模块1、滤波模块2等设置在第一电路板100上的电子元件松动,进而出现开焊或脱落连接等问题,进一步提高导航装置的抗干扰能力。
44.如附图3至附图8所示,更进一步来说,还可以所述第一接头101和第二接头201之间或所述第一电路板100和第二电路板200之间设置有减震物(图中未表示出),如减震棉,防止蜂鸣器52的震动传递至所述第一电路板100上。
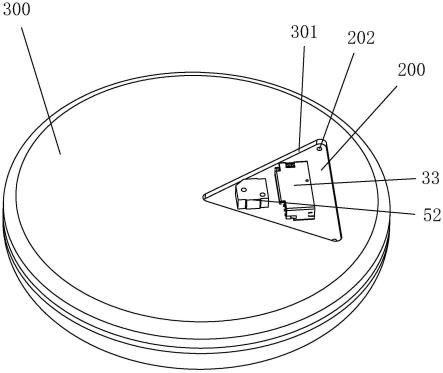
45.如附图1至附图8所示,在本实施例中,还包括保护壳300,所述第一电路板100设置在所述保护壳300内,所述保护壳300开设有供所述第一接头101或供所述第二电路板200露出的开口301使得所述第二电路板200设置在所述保护壳300内或设置在所述保护壳300上。所述保护壳300包括第一壳体302和第二壳体303,所述第一壳体302和第二壳体303盖合形成容纳所述第一电路板100的容纳腔304,所述开口301设置在所述第二壳体303上。所述保护壳300可以对第一电路板100和第二电路板200起保护作用,还可以在所述第二电路板200与第一电路板100或保护壳300直接设置防水件,如密封防水圈,可以进一步提高对第一电路板100起保护作用,当然也可以在第二电路板200设置在所述保护壳300上时,增设一个用于保护所述第二电路板200的保护壳300。
46.如附图1至附图8所示,在本实施例中,当所述地磁传感器5和气压传感器6设置在所述第二电路板200上时,所述地磁传感器5和气压传感器6设置在所述第二电路板200位于所述第二接头201一侧的端面上或背离所述第二接头201一侧的端面上,所述蜂鸣器52设置在所述第二电路板200背离所述第二接头201一侧的端面上或位于所述第二接头201一侧的端面上。本实施例附图中只提供了一个实施例,传感器具体的放置位置可以根据实际使用情况自行选择,不受本实施例的限制。所述蜂鸣器52设置在所述第二电路板200背离所述第二接头201一侧的端面上使得蜂鸣器52朝外,增大蜂鸣器52声音的传播范围,使得用户能清楚听到蜂鸣器52的声音,同时还可以避免出现当蜂鸣器52设置在位于所述第二接头201一侧的端面上时,蜂鸣器52的声音因保护壳300的限制导致传播范围小以及蜂鸣器52靠近第一电路板100时蜂鸣器52的震动和电磁式蜂鸣器的线圈会干扰天线模块1和滤波模块2的正常工作等问题的发生。
47.更进一步来说,所述安全开关3可以设置在所述第二电路板200背离所述第二接头201一侧的端面上。
48.如附图1至附图8所示,在本实施例中,所述第二电路板200背离所述第二电路板200一侧端面上还设置有tf/sd卡槽33。tf/sd卡槽33露出,方便用户随时取下tf卡或sd卡读取数据,避免频繁对所述保护壳300进行拆卸,影响工作效率。
49.如附图1和附图4所示,更进一步来说,所述第二电路板200的端面与所述保护壳300的外侧端面之间的距离大于等于0。在本实施例中,所述第二电路板200的端面与所述保
护壳300的外侧端面之间存在一定距离,即距离大于0,方便tf卡或sd卡插入至所述tf/sd卡槽33后,tf卡或sd卡与所述第二壳体303的外侧端面齐平,限制tf卡和sd卡的移动,防止误触造成tf卡和sd卡从tf/sd卡槽33中脱落造成tf卡和sd卡的丢失等情况的发生。当然所述第二电路板200的端面与所述保护壳300的外侧端面之间的距离等于0,即所述第二电路板200的端面与所述保护壳300的外侧端面平齐。
50.如附图1至附图8所示,在本实施例中,所述第二电路板200上设置有若干个第一螺孔202,所述第一电路板100上设置有装配后与所述第一螺孔202相对准的第二螺孔102,所述第一电路板100和第二电路板200通过螺栓固定连接在一起。为了无人机飞行的稳定性,将所述第一电路板100和第二电路板200通过螺栓固定连接在一起,避免第二电路板200在无人机在飞行时第二电路板200的脱落造成无人机失控、数据丢失等情况的发生,当然还可以使用快拆件对第二电路板200进行固定。
51.如附图1至附图8所示,在本实施例中,所述第一电路板100上还设置有与所述处理器单元7电连接的输出接口9。所述保护壳300对应所述输出接口9设置有供导线或接头伸入的开口(图中未示出),方便导航装置与无人机进行连接、通讯。
52.实施例二
53.如附图10所示,与实施例一中所述地磁传感器5和气压传感器6设置在所述第二电路板200上不同的是,在实施例二中所述地磁传感器5和气压传感器6设置在所述第一电路板100上,使得蜂鸣器52和安全开关3均设置在所述第二电路板200上,从而使得蜂鸣器52、安全开关3远离第一电路板100以及远离地磁传感器5和气压传感器6,有效避免蜂鸣器52的震动以及其电磁式蜂鸣器的线圈干扰天线模块1、滤波模块2、地磁传感器5和气压传感器6等设置在所述第一电路板100上的电子元件的正常工作,有效提高导航装置的抗干扰能力,同时有效避免长时间按压安全开关3,导致出现天线模块1、滤波模块2等设置在第一电路板100上的电子元件松动,进而出现开焊或脱落连接等问题,进一步提高导航装置的抗干扰能力。
54.实施例三
55.如附图1至附图8、附图11和附图13所示,一种无人机抗干扰高精度导航装置,包括天线模块1和与所述天线模块1电连接的滤波模块2,还包括第一电路板100和与所述第一电路板100可拆卸连接的第二电路板200,所述天线模块1和滤波模块2设置在所述第一电路板100上,所述第一电路板100上还设置有与所述滤波模块2电连接的定位模块4、与所述定位模块4电连接的处理器单元7以及与所述处理器单元7电连接的收发模块8,所述第二电路板200上设置有安全开关3,当所述第一电路板100和第二电路板200连接时所述安全开关3与所述处理器单元7电连接,所述第一电路板100或第二电路板200上设置有与所述处理器单元7电连接的传感器。将容易干扰其他电子元件的传感器、电子元件和安全开关3移出并设置在第二电路板200上,并且第二电路板200与设置有天线模块1和滤波模块2的第一电路板100可拆卸连接,电子元件可以根据需要随意设置在第一电路板100或第二电路板200上,有效避免容易干扰其他电子元件的传感器或电子元件干扰天线模块1和滤波模块2的正常工作,有效提高导航装置的抗干扰能力,以及有效避免长时间按压安全开关3,导致出现天线模块1、滤波模块2等设置在第一电路板100上的电子元件松动,进而出现开焊或脱落连接等问题,进一步提高导航装置的抗干扰能力。
56.如附图1至附图8所示,在本实施例中,所述第一电路板100上设置有第一接头101,所述第二电路板200上设置有与所述第一接头101相适配的第二接头201,当所述传感器设置在所述第二电路板200上时,所述传感器和安全开关3通过所述第一接头101和第二接头201与所述处理器单元7电连接。所述安全开关3包括按键开关、led等。所述第一接头101和第二接头201可徒手快速拆装,通过所述第一接头101和第二接头201的快速拆装即可实现所述第一电路板100和第二电路板200的快速装配、拆卸以及第二电路板200的快速更换,即可实现各种传感器、模块的随意选择以及组合使用,更进一步来说,所述第一接头101和第二接头201为板对板连接器。
57.如附图1至附图8所示,在本实施例中,所述传感器包括设置在所述第二电路板200上的惯性导航传感器51以及设置在所述第一电路板100或第二电路板200上的地磁传感器5和气压传感器6;当所述地磁传感器5和气压传感器6设置在所述第二电路板200上时,所述地磁传感器5和气压传感器6以及所述安全开关3和惯性导航传感器51均通过所述第一接头101和第二接头201与所述处理器单元7电连接。
58.更进一步来说,滤波模块2采用的lna+saw滤波的两重滤波或述saw+lna+saw滤波三重滤波等方式,可以选用的是b39152b3421u410等的saw滤波器;所述地磁传感器5可以采用rm3100工业级地磁传感器等传感器,所述收发模块8采用是uav can总线等方式。
59.如附图1至附图8所示,更进一步来说,在实施例三中,所述地磁传感器5和气压传感器6设置在所述第二电路板200上,使得惯性导航传感器51、安全开关3、地磁传感器5和气压传感器6均设置在所述第二电路板200上,从而使得安全开关3远离第一电路板100,有效避免长时间按压安全开关3,导致出现天线模块1、滤波模块2等设置在第一电路板100上的电子元件松动,进而出现开焊或脱落连接等问题,进一步提高导航装置的抗干扰能力。
60.如附图1至附图8所示,更进一步来说,由于蜂鸣器52的震动以及电磁式蜂鸣器的线圈会严重干扰所述惯性导航传感器51的正常工作,因此为了提高导航装置的抗干扰能力,当所述第二电路板200上设置有所述惯性导航传感器51时,蜂鸣器52不能与惯性导航传感器51同时设置在所述第二电路板200上,并且为了进一步防止蜂鸣器52设置在第一电路板100上影响天线模块1、滤波模块2的正常工作,所以在本实施例中,所述第一电路板100和第二电路板200均没有设置蜂鸣器52,从而提高本实施例的导航装置的抗干扰能力。
61.如附图3至附图8所示,更进一步来说,还可以所述第一接头101和第二接头201之间或所述第一电路板100和第二电路板200之间设置有减震物(图中未表示出),如减震棉,防止蜂鸣器52的震动传递至所述第一电路板100上。
62.如附图1至附图8所示,在本实施例中,还包括保护壳300,所述第一电路板100设置在所述保护壳300内,所述保护壳300开设有供所述第一接头101或供所述第二电路板200露出的开口301使得所述第二电路板200设置在所述保护壳300内或设置在所述保护壳300上。所述保护壳300包括第一壳体302和第二壳体303,所述第一壳体302和第二壳体303盖合形成容纳所述第一电路板100的容纳腔304,所述开口301设置在所述第二壳体303上。所述保护壳300可以对第一电路板100和第二电路板200起保护作用,还可以在所述第二电路板200与第一电路板100或保护壳300直接设置防水件,如密封防水圈,可以进一步提高对第一电路板100起保护作用,当然还可以在第二电路板200设置在所述保护壳300上时,增设一个用于保护所述第二电路板200的保护壳300。
63.如附图1至附图8所示,在本实施例中,当所述地磁传感器5和气压传感器6设置在所述第二电路板200上时,所述地磁传感器5和气压传感器6设置在所述第二电路板200位于所述第二接头201一侧的端面上或背离所述第二接头201一侧的端面上,所述蜂鸣器52设置在所述第二电路板200背离所述第二接头201一侧的端面上或位于所述第二接头201一侧的端面上。本实施例附图中只提供了一个实施例,传感器具体的放置位置可以根据实际使用情况自行选择,不受本实施例的限制。所述蜂鸣器52设置在所述第二电路板200背离所述第二接头201一侧的端面上使得蜂鸣器52朝外,增大蜂鸣器52声音的传播范围,使得用户能清楚听到蜂鸣器52的声音,同时还可以避免出现当蜂鸣器52设置在位于所述第二接头201一侧的端面上时,蜂鸣器52的声音因保护壳300的限制导致传播范围小以及蜂鸣器52靠近第一电路板100时蜂鸣器52的震动和电磁式蜂鸣器的线圈会干扰天线模块1和滤波模块2的正常工作等问题的发生。
64.更进一步来说,所述安全开关3可以设置在所述第二电路板200背离所述第二接头201一侧的端面上。
65.如附图1至附图8所示,在本实施例中,所述第二电路板200背离所述第二电路板200一侧端面上还设置有tf/sd卡槽33。tf/sd卡槽33露出,方便用户随时取下tf卡或sd卡读取数据,避免频繁对所述保护壳300进行拆卸,影响工作效率。
66.如附图1至附图8所示,更进一步来说,所述第二电路板200的端面与所述保护壳300的外侧端面之间的距离大于等于0。在本实施例中,所述第二电路板200的端面与所述保护壳300的外侧端面之间存在一定距离,即距离大于0,方便tf卡或sd卡插入至所述tf/sd卡槽33后,tf卡或sd卡与所述第二壳体303的外侧端面齐平,限制tf卡和sd卡的移动,防止误触造成tf卡和sd卡从tf/sd卡槽33中脱落造成tf卡和sd卡的丢失等情况的发生。当然所述第二电路板200的端面与所述保护壳300的外侧端面之间的距离等于0,即所述第二电路板200的端面与所述保护壳300的外侧端面平齐。
67.如附图1至附图8所示,在本实施例中,所述第二电路板200上设置有若干个第一螺孔202,所述第一电路板100上设置有装配后与所述第一螺孔202相对准的第二螺孔102,所述第一电路板100和第二电路板200通过螺栓固定连接在一起。为了无人机飞行的稳定性,将所述第一电路板100和第二电路板200通过螺栓固定连接在一起,避免第二电路板200在无人机在飞行时第二电路板200的脱落造成无人机失控、数据丢失等情况的发生,当然还可以使用快拆件对第二电路板200进行固定。
68.如附图1至附图8所示,在本实施例中,所述第一电路板100上还设置有与所述处理器单元7电连接的输出接口9。所述保护壳300对应所述输出接口9设置有供导线或接头伸入的开口(图中未示出),方便导航装置与无人机进行连接、通讯。
69.实施例四
70.如附图12所示,与实施例三中所述地磁传感器5和气压传感器6设置在所述第二电路板200上不同的是,本实施例四中所述地磁传感器5和气压传感器6设置在所述第一电路板100上,使得安全开关3设置在所述第二电路板200上,从而使得安全开关3远离第一电路板100以及远离地磁传感器5和气压传感器6,有效避免长时间按压安全开关3,导致出现天线模块1、滤波模块2等设置在第一电路板100上的电子元件松动,进而出现开焊或脱落连接等问题,进一步提高导航装置的抗干扰能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1