一种全自动取样装置的制作方法
本技术涉及机械自动化,具体涉及一种全自动取样装置。
背景技术:
1、目前在传统模式的制铝行业中,为人工取样块,人员需要进入熔炼区进行取样,具有很大的安全隐患,而且,人为取样,样块大小通常相对不一致。因此主要存在以下缺陷:
2、1、人员进入熔炼区,造成安全隐患,
3、2、样块大小不一致,无法保证取样品质。
4、综上所述,目前需要一种取代人员取样作业的自动化工装。
技术实现思路
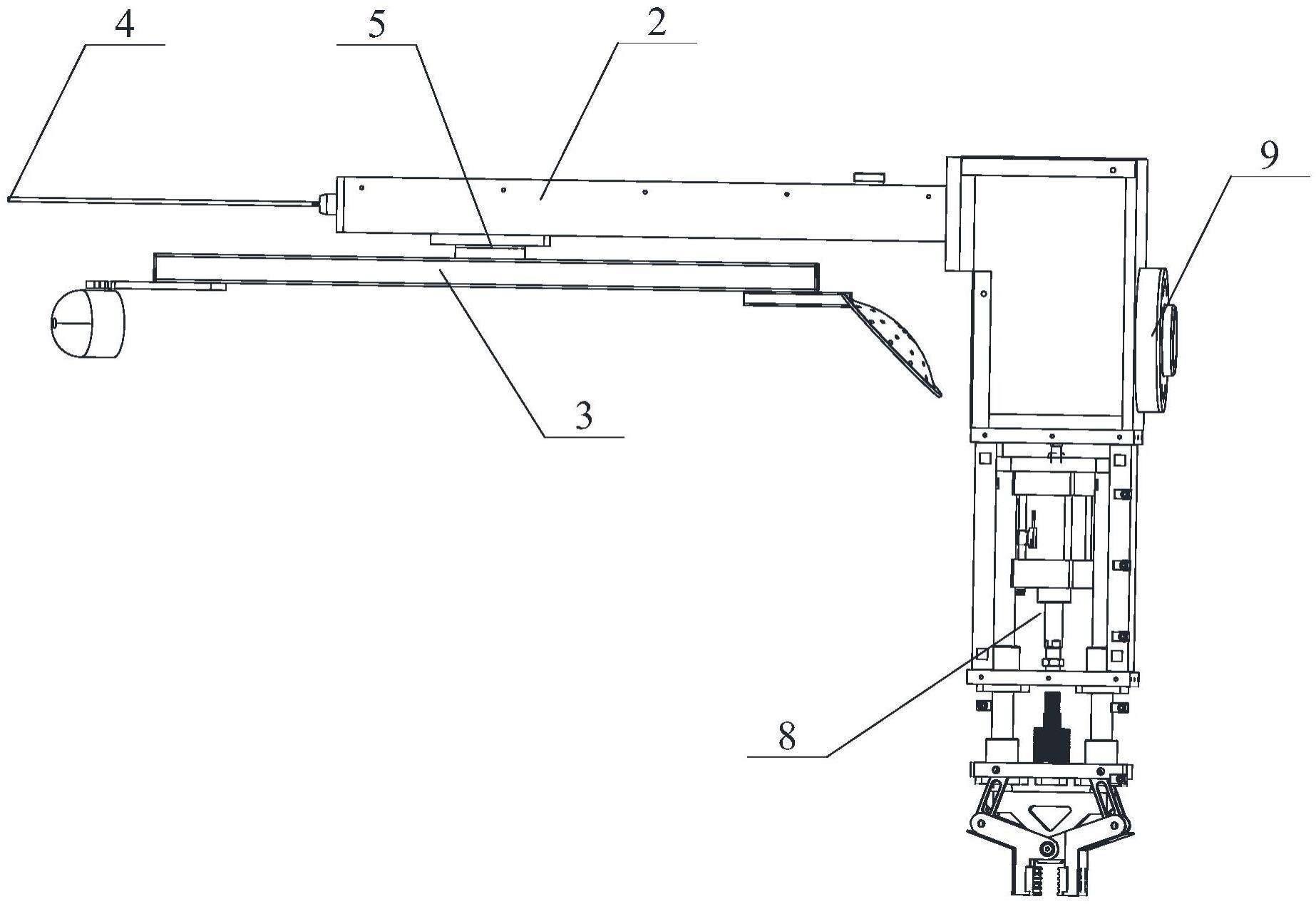
1、为了解决上述技术问题,本实用新型所采用的技术方案是提供一种全自动取样装置,依次包括取样机器人、取样工装和取样勺,所述取样机器人与取样工装呈相互垂直可拆卸连接,所述取样工装的自由端穿出设有探针,所述取样工装的内部设有连接所述探针与所述取样机器人的控制元件,所述取样勺平行于所述取样工装的一侧布置,所述取样勺的中部和所述取样工装的上部通过铰轴旋转连接,所述铰轴与所述控制元件连接,所述取样勺的两端分别设有筛状的第一勺体和碗状的第二勺体,所述第一勺体的直径大于所述第二勺体的直径。
2、在上述方案中,所述探针的最远端长度大于所述取样勺的最远端突出长度。
3、在上述方案中,所述取样机器人的内部设有伸缩臂结构,所述伸缩臂结构的自由端连接有抓取装置。
4、在上述方案中,所述取样机器人上设有外接动力源以及控制终端的接口
5、本实用新型,以及自动化取样臂和取样勺取代人工取样,避免了安全隐患。且取样块大小一致易控,保证了取样的品质。
技术特征:
1.一种全自动取样装置,其特征在于,依次包括取样机器人、取样工装和取样勺,所述取样机器人与取样工装呈相互垂直可拆卸连接,所述取样工装的自由端穿出设有探针,所述取样工装的内部设有连接所述探针与所述取样机器人的控制元件,所述取样勺平行于所述取样工装的一侧布置,所述取样勺的中部和所述取样工装的上部通过铰轴旋转连接,所述铰轴与所述控制元件连接,所述取样勺的两端分别设有筛状的第一勺体和碗状的第二勺体,所述第一勺体的直径大于所述第二勺体的直径。
2.如权利要求1所述的全自动取样装置,其特征在于,所述探针的最远端长度大于所述取样勺的最远端突出长度。
3.如权利要求1所述的全自动取样装置,其特征在于,所述取样机器人的内部设有伸缩臂结构,所述伸缩臂结构的自由端连接有抓取装置。
4.如权利要求1所述的全自动取样装置,其特征在于,所述取样机器人上设有外接动力源以及控制终端的接口。
技术总结
本技术公开了一种全自动取样装置,依次包括取样机器人、取样工装和取样勺,所述取样机器人与取样工装呈相互垂直可拆卸连接,所述取样工装的自由端穿出设有探针,所述取样工装的内部设有连接所述探针与所述取样机器人的控制元件,所述取样勺平行于所述取样工装的一侧布置,所述取样勺的中部和所述取样工装的上部通过铰轴旋转连接,所述铰轴与所述控制元件连接,所述取样勺的两端分别设有筛状的第一勺体和碗状的第二勺体,所述第一勺体的直径大于所述第二勺体的直径。本技术,以及自动化取样臂和取样勺取代人工取样,避免了安全隐患。且取样块大小一致易控,保证了取样的品质。
技术研发人员:梁鹏宇,范悦,韩锋
受保护的技术使用者:吉林省浪江科技有限公司
技术研发日:20221231
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!