机器人充电桩、机器人及机器人系统的制作方法
本申请涉及机器人,尤其是涉及一种机器人充电桩、机器人及机器人系统。
背景技术:
1、随着机器人技术与人工智能技术的发展,以及人们对生活质量的追求日渐提高,家居机器人开始获得广泛应用。家居机器人想要实现真正的人工智能,自主回桩充电功能是最基础的功能,而回桩充电过程中对桩的精确度及对桩成功率,是一款人工智能机器人是否优秀的评判标准之一。
2、以扫地机器人为例,目前扫地机器人的回桩充电方式为,通过充电桩不断发出红外信号,机器人上的接收器接收到信号后,找到充电桩实现回桩充电。然而,这种回桩方式机器人在距离充电桩一定范围内需要通过自身旋转的方式进行定位,回桩效率和对准精度相对而言并不太高。
技术实现思路
1、为解决现有存在的技术问题,本申请提供一种机器人充电桩、机器人及机器人系统,能够提升机器人回桩效率。
2、为达到上述目的,本申请实施例的技术方案是这样实现的:
3、一方面,本申请实施例提供一种机器人充电桩,包括充电桩本体及设置在所述充电桩本体内的红外对准接收器;所述红外对准接收器用于接收机器人的红外对准传感器发出的红外线,包括分别用于探测水平面内不同区域的至少两个红外接收端,使所述机器人相对所述机器人充电桩处于不同位置上时,所述红外对准传感器发出的红外线被所述红外对准接收器中的不同红外接收端接收。
4、在其中一个实施例中,所述红外对准接收器包括第一红外接收端、第二红外接收端及第三红外接收端,所述第二红外接收端和所述第三红外接收端分别设置于所述第一红外接收端的左右两侧;
5、当所述第一红外接收端接收到红外线时,所述机器人对准所述机器人充电桩;当所述第二红外接收端接收到红外线时,所述机器人相对所述机器人充电桩偏左;当所述第三红外接收端接收到红外线时,所述机器人相对所述机器人充电桩偏右。
6、在其中一个实施例中,所述第一红外接收端、所述第二红外接收端及所述第三红外接收端安装在沿竖直方向设置的背板上,所述背板的前端面上连接有沿竖直方向设置的第一隔板和第二隔板;
7、所述第一红外接收端设于所述第一隔板与所述第二隔板之间,以接收进入所述第一隔板与所述第二隔板之间的红外线;所述第二红外接收端设于所述第一隔板与所述背板之间,以接收进入所述第一隔板与所述背板之间的红外线;所述第三红外接收端设于所述第二隔板与所述背板之间,以接收进入所述第一隔板与所述背板之间的红外线。
8、在其中一个实施例中,所述第一隔板与所述第二隔板对称设置在所述第一红外接收端的两侧,所述第二红外接收端与所述第三红外接收端对称设置在所述第一红外接收端的两侧。
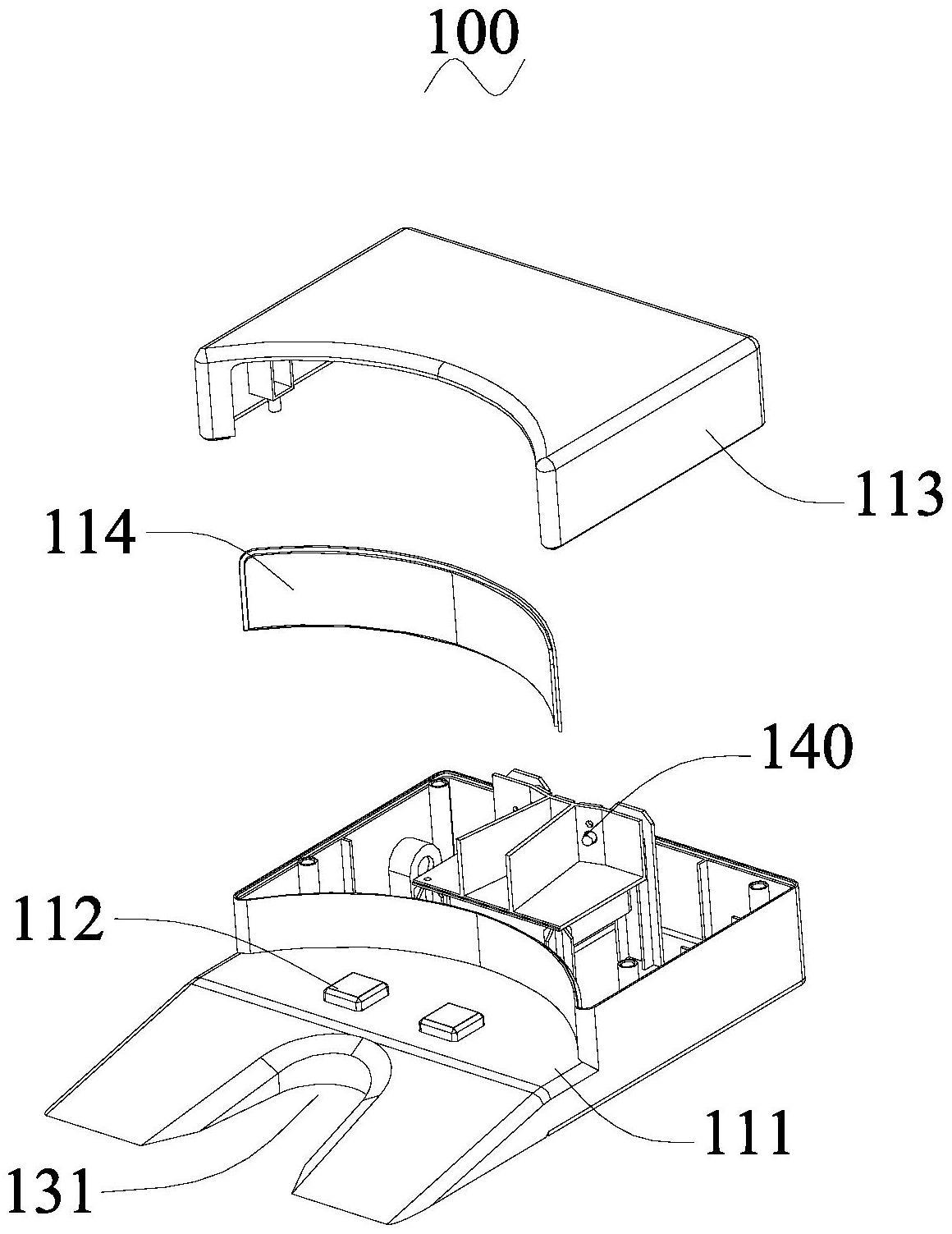
9、在其中一个实施例中,所述充电桩本体的前端设有凸台,所述凸台上设有用于连接所述机器人的充电接口的充电弹片,所述充电桩本体在所述充电弹片上方凹设形成对桩辅助仓,所述对桩辅助仓的形状与所述机器人的机器人本体的后端外廓形状相同以约束机器人的位置。
10、在其中一个实施例中,所述凸台的前端连接有斜坡板,所述斜坡板由前端向后端高度递增至与所述凸台等高。
11、在其中一个实施例中,所述斜坡板的中部开设有后轮对桩辅助槽,所述后轮对桩辅助槽相对所述对桩辅助仓的位置与所述机器人中的后轮相对所述机器人本体的位置相同,所述后轮对桩辅助槽呈开口宽的敞口槽,以供后轮从所述后轮对桩辅助槽的开口进入并逐渐限位。
12、在其中一个实施例中,所述充电桩本体内还设有用于测量所述机器人与所述充电桩本体之间距离的充电桩测距传感器。
13、另一方面,本申请实施例提供一种机器人,采用如前文所述的机器人充电桩进行充电,包括机器人本体、行走轮、充电接口及红外对准传感器;所述机器人本体设置在所述行走轮上,所述充电接口及所述红外对准传感器设于所述机器人本体上,所述红外对准传感器与所述红外对准接收器相匹配,以使所述红外对准传感器发出的红外线被所述红外对准接收器中的不同红外接收端接收。
14、在其中一个实施例中,所述红外对准传感器设于所述机器人本体的后端,所述机器人本体的后端还设有红外防撞传感器,所述红外防撞传感器用于通过红外测距测量所述机器人本体与机器人充电桩之间的直线距离。
15、再一方面,本申请实施例提供一种机器人系统,包括机器人以及为所述机器人充电的机器人充电桩;所述机器人充电桩包括充电桩本体及设置在所述充电桩本体内的红外对准接收器;所述机器人包括机器人本体及设置在所述机器人本体上的红外对准传感器;所述红外对准接收器与所述红外对准传感器相匹配,所述红外对准接收器包括分别用于探测水平面内不同区域的至少两个红外接收端,以使所述机器人相对所述机器人充电桩处于不同位置上时所述红外对准传感器发出的红外线被所述红外对准接收器中的不同红外接收端接收。
16、本申请的机器人充电桩、机器人及机器人系统至少具有以下有益效果:本申请的机器人充电桩、机器人及机器人系统通过设置于机器人充电桩内的红外对准接收器接收机器人的红外对准传感器发出的红外线,红外对准接收器具有分别用于探测水平面内不同区域的至少两个红外接收端,通过至少两个红外接收端其中之一接收到红外线可得到机器人相对机器人充电桩的位置范围,由此可加速机器人返回机器人充电桩,从而提升机器人回桩效率。
技术特征:
1.一种机器人充电桩,其特征在于:包括充电桩本体(110)及设置在所述充电桩本体(110)内的红外对准接收器(140);所述红外对准接收器(140)用于接收机器人(200)的红外对准传感器(240)发出的红外线,包括分别用于探测水平面内不同区域的至少两个红外接收端,使所述机器人(200)相对机器人充电桩(100)处于不同位置上时,所述红外对准传感器(240)发出的红外线被所述红外对准接收器(140)中的不同红外接收端接收。
2.根据权利要求1所述的机器人充电桩,其特征在于:所述红外对准接收器(140)包括第一红外接收端(141)、第二红外接收端(142)及第三红外接收端(143),所述第二红外接收端(142)和所述第三红外接收端(143)分别设置于所述第一红外接收端(141)的左右两侧;
3.根据权利要求2所述的机器人充电桩,其特征在于:所述第一红外接收端(141)、所述第二红外接收端(142)及所述第三红外接收端(143)安装在沿竖直方向设置的背板(146)上,所述背板(146)的前端面上连接有沿竖直方向设置的第一隔板(144)和第二隔板(145);
4.根据权利要求3所述的机器人充电桩,其特征在于:所述第一隔板(144)与所述第二隔板(145)对称设置在所述第一红外接收端(141)的两侧,所述第二红外接收端(142)与所述第三红外接收端(143)对称设置在所述第一红外接收端(141)的两侧。
5.根据权利要求1所述的机器人充电桩,其特征在于:所述充电桩本体(110)的前端设有凸台(111),所述凸台(111)上设有用于连接所述机器人(200)的充电接口(230)的充电弹片(112),所述充电桩本体(110)在所述充电弹片(112)上方凹设形成对桩辅助仓(120),所述对桩辅助仓(120)的形状与所述机器人(200)的机器人本体(210)的后端外廓形状相同以约束所述机器人(200)的位置。
6.根据权利要求5所述的机器人充电桩,其特征在于:所述凸台(111)的前端连接有斜坡板(130),所述斜坡板(130)由前端向后端高度递增至与所述凸台(111)等高。
7.根据权利要求6所述的机器人充电桩,其特征在于:所述斜坡板(130)的中部开设有后轮对桩辅助槽(131),所述后轮对桩辅助槽(131)相对所述对桩辅助仓(120)的位置与所述机器人(200)中的后轮(222)相对所述机器人本体(210)的位置相同,所述后轮对桩辅助槽(131)呈开口宽的敞口槽,以供后轮(222)从所述后轮对桩辅助槽(131)的开口进入并逐渐限位。
8.根据权利要求1所述的机器人充电桩,其特征在于:所述充电桩本体(110)内还设有用于测量所述机器人(200)与所述充电桩本体(110)之间距离的充电桩测距传感器(150)。
9.一种机器人,采用根据权利要求1至8中任一项所述的机器人充电桩进行充电,其特征在于:包括机器人本体(210)、行走轮(220)、充电接口(230)及红外对准传感器(240);所述机器人本体(210)设置在所述行走轮(220)上,所述充电接口(230)及所述红外对准传感器(240)设于所述机器人本体(210)上,所述红外对准传感器(240)与所述红外对准接收器(140)相匹配,以使所述红外对准传感器(240)发出的红外线被所述红外对准接收器(140)中的不同红外接收端接收。
10.根据权利要求9所述的机器人,其特征在于:所述红外对准传感器(240)设于所述机器人本体(210)的后端,所述机器人本体(210)的后端还设有红外防撞传感器(250),所述红外防撞传感器(250)用于通过红外测距测量所述机器人本体(210)与机器人充电桩(100)之间的直线距离。
11.一种机器人系统,包括机器人(200)以及为所述机器人(200)充电的机器人充电桩(100),其特征在于:所述机器人充电桩(100)包括充电桩本体(110)及设置在所述充电桩本体(110)内的红外对准接收器(140);所述机器人(200)包括机器人本体(210)及设置在所述机器人本体(210)上的红外对准传感器(240);所述红外对准接收器(140)与所述红外对准传感器(240)相匹配,所述红外对准接收器(140)包括分别用于探测水平面内不同区域的至少两个红外接收端,以使所述机器人(200)相对所述机器人充电桩(100)处于不同位置上时所述红外对准传感器(240)发出的红外线被所述红外对准接收器(140)中的不同红外接收端接收。
技术总结
本申请提供一种机器人充电桩、机器人及机器人系统,所述机器人充电桩包括充电桩本体及设置在所述充电桩本体内的红外对准接收器;所述红外对准接收器用于接收机器人的红外对准传感器发出的红外线,包括分别用于探测水平面内不同区域的至少两个红外接收端,使所述机器人相对所述机器人充电桩处于不同位置上时,所述红外对准传感器发出的红外线被所述红外对准接收器中的不同红外接收端接收。本申请的机器人充电桩、机器人及机器人系统,通过设置于机器人充电桩内的红外对准接收器接收机器人发出的红外线,通过至少两个红外接收端其中之一接收到红外线可得到机器人相对机器人充电桩的位置,可加速机器人返回机器人充电桩,从而提升机器人回桩效率。
技术研发人员:侯程坤
受保护的技术使用者:烟台艾睿光电科技有限公司
技术研发日:20221229
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!