具有枢转棱镜和反射镜的LIDAR扫描仪的制作方法
本公开总体上涉及光学扫描,并且更特别地,涉及一种使用光学折射设备的紧凑型lidar系统。
背景技术:
1、光探测和测距(lidar)系统使用光脉冲来创建外部环境的图像或点云。一些典型的lidar系统包括光源、光传输器、光转向系统和光检测器。光源生成光束,该光束在从lidar系统传输时被光转向系统定向到特定方向。当所传输的光束被物体散射时,所散射的光的一部分作为返回光脉冲返回到lidar系统。光检测器检测返回光脉冲。使用检测到返回光脉冲的时间和光束中相应光脉冲被传输的时间之间的差,lidar系统可以使用光速确定到物体的距离。光转向系统可以沿着不同的路径导向光束,以允许lidar系统扫描周围环境并产生图像或点云。lidar系统还可以使用除了飞行时间和扫描之外的技术来测量周围环境。
技术实现思路
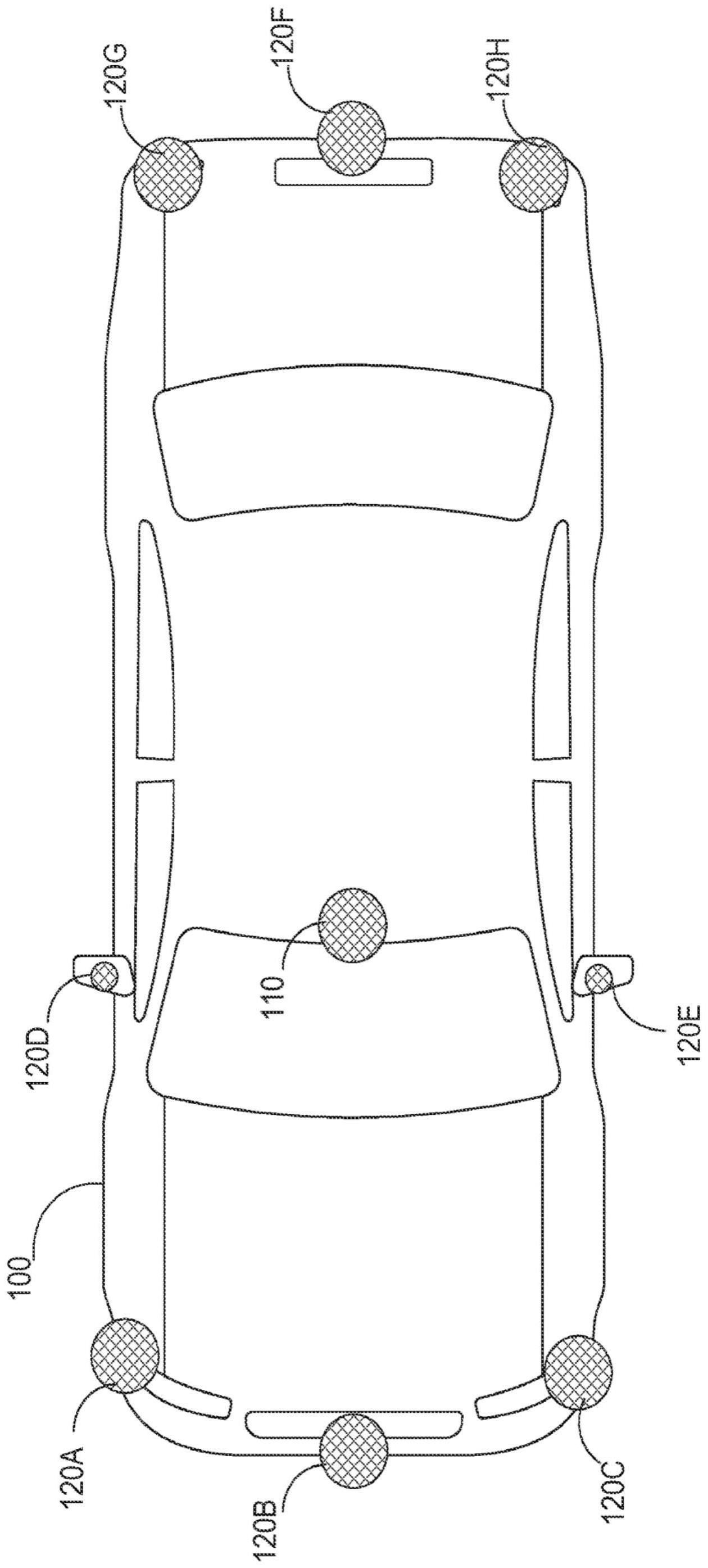
1、本公开的实施例包括紧凑型lidar系统的转向机构。转向机构包括光学折射设备和光学反射设备(例如,反射镜)。通过控制光学折射设备和光学反射设备振荡而非旋转,可以减小转向机构的尺寸,从而使lidar系统更紧凑。转向机构的减小的尺寸使lidar系统或其至少一部分更容易装配到车辆或另一平台中的小空间中。这些小空间可以包括例如后视镜、车辆拐角、摄像机组件等。此外,光学折射设备和光学反射设备的移动轮廓(profile)可以被配置成使得这两个设备以相对于彼此交替的方式移动,以在水平和竖直扫描方向两者上获得平坦的扫描线。在lidar扫描线的后续处理(例如,感知过程)中,平坦的扫描线通常是期望的。另外,提供位置反馈用于实时控制光学折射设备和光学反射设备。因此,可以调节或补偿它们各自的移动轮廓,以提高两个设备的位置精度。从而提高了lidar系统的整体性能。
2、在一个实施例中,本公开提供了一种光探测和测距(lidar)扫描系统。该系统包括耦合到第一致动器的光学折射设备,第一致动器被配置成使光学折射设备振荡。该系统还包括反射镜,该反射镜光学耦合到光学折射设备并且耦合到被配置成使反射镜振荡的第二致动器。该系统还包括通信地耦合到第一致动器和第二致动器的一个或多个控制器。控制器被配置成控制光学折射设备的振荡和反射镜的振荡以竖直和水平地转向一个或多个光束以照射视场内的一个或多个物体,获得基于照射视场内的一个或多个物体的被转向的一个或多个光束而生成的返回光,并将返回光重定向到设置在系统中的收集透镜。
3、在一个实施例中,本公开提供了一种光探测和测距(lidar)扫描系统的控制器设备。控制器设备包括:一个或多个处理器;存储器;以及存储在存储器中的处理器可执行指令。处理器可执行指令包括指令,当指令由一个或多个处理器执行时,使得控制器设备执行控制第一致动器以使光学折射设备基于光学折射设备的第一移动轮廓振荡的处理。还使得控制器设备执行控制第二致动器以使反射镜基于反射镜的第二移动轮廓振荡的处理。光学折射设备和反射镜被控制成竖直和水平地转向一个或多个光束以照射视场内的一个或多个物体,获得基于照射视场内的一个或多个物体的被转向的一个或多个光束而生成的返回光,并将返回光重定向到设置在lidar系统中的收集透镜。
4、在一个实施例中,公开了一种用于控制光探测和测距(lidar)扫描系统的方法。该方法由一个或多个处理器和存储器执行。该方法包括控制第一致动器以使光学折射设备基于光学折射设备的第一移动轮廓振荡。该方法还包括控制第二致动器以使反射镜基于反射镜的第二移动轮廓振荡。光学折射设备和反射镜被控制成竖直和水平地转向一个或多个光束以照射视场内的一个或多个物体,获得基于照射视场内的一个或多个物体的被转向的一个或多个光束而生成的返回光,并将返回光重定向到设置在lidar系统中的收集透镜。
技术特征:
1.一种光探测和测距(lidar)扫描系统,包括:
2.根据权利要求1所述的系统,其中,所述光学折射设备是光学棱镜。
3.根据权利要求2所述的系统,其中,所述光学棱镜包括以下中的至少一项:
4.根据权利要求2和3中任一项所述的系统,其中,所述光学棱镜包括两个侧表面,所述两个侧表面被配置成折射所述一个或多个光束。
5.根据权利要求1至4中任一项所述的系统,还包括传输器,其中,所述光学折射设备设置在所述传输器和所述反射镜之间,并且其中,所述光学折射设备折射所述一个或多个光束以形成折射光束,并将所述折射光束引导至所述反射镜。
6.根据权利要求1至5中任一项所述的系统,还包括规划器,所述规划器被配置成确定所述光学折射设备的第一移动轮廓和所述反射镜的第二移动轮廓;
7.根据权利要求6所述的系统,其中,确定所述光学折射设备的所述第一移动轮廓和所述反射镜的所述第二移动轮廓包括:
8.根据权利要求7所述的系统,其中,所述一个或多个lidar扫描要求包括以下中的至少一项:
9.根据权利要求6至8中任一项所述的系统,其中,确定所述光学折射设备的所述第一移动轮廓和所述反射镜的所述第二移动轮廓包括:
10.根据权利要求6至9中任一项所述的系统,其中,所述光学折射设备的所述第一移动轮廓包括表示所述光学折射设备在第一角位置和第二角位置之间的振荡轨迹的角位置和时间关系。
11.根据权利要求6至10中任一项所述的系统,其中,所述光学折射设备的所述第二移动轮廓包括表示所述反射镜在第三角位置和第四角位置之间的振荡轨迹的角位置和时间关系。
12.根据权利要求6至11中任一项所述的系统,其中,控制所述第一致动器以使所述光学折射设备基于所述光学折射设备的所述第一移动轮廓振荡包括:
13.根据权利要求12所述的系统,还包括:
14.根据权利要求6至13中任一项所述的系统,其中,控制所述第二致动器以使所述反射镜基于所述光学折射设备的所述第二移动轮廓振荡包括:
15.根据权利要求14所述的系统,还包括:
16.根据权利要求1至15中任一项所述的系统,其中,所述光学折射设备是光学棱镜,所述光学棱镜是光学折射设备组件的一部分,所述光学折射设备组件还包括:
17.根据权利要求1至16中任一项所述的系统,其中,所述反射镜是反射镜组件的一部分,所述反射镜组件还包括:
18.一种光探测和测距(lidar)扫描系统的控制器设备,包括:
19.一种用于控制光探测和测距(lidar)扫描系统的方法,所述方法由一个或多个处理器和存储器执行,所述方法包括:
20.根据权利要求19所述的方法,还包括确定所述光学折射设备的所述第一移动轮廓和所述反射镜的所述第二移动轮廓。
21.根据权利要求20所述的方法,其中,确定所述光学折射设备的所述第一移动轮廓和所述反射镜的所述第二移动轮廓包括:
22.根据权利要求19至21中任一项所述的方法,其中,确定所述光学折射设备的所述第一移动轮廓和所述反射镜的所述第二移动轮廓包括:
23.根据权利要求19至22中任一项所述的方法,其中,控制所述第一致动器以使所述光学折射设备基于所述光学折射设备的所述第一移动轮廓振荡包括:
24.根据权利要求23所述的方法,还包括:
25.根据权利要求19至24中任一项所述的方法,其中,控制所述第二致动器以使所述反射镜基于所述光学折射设备的所述第二移动轮廓振荡包括:
26.根据权利要求25所述的方法,还包括:
27.一种存储处理器可执行指令的非暂时性计算机可读介质,所述处理器可执行指令包括指令,当所述指令由电子设备的一个或多个处理器执行时使所述电子设备执行根据权利要求19至26中任一项所述的方法。
28.一种车辆,包括根据权利要求1至17中任一项所述的光探测和测距(lidar)扫描系统。
技术总结
公开了一种光探测和测距(LiDAR)扫描系统。在一个实施例中,该系统包括耦合到第一致动器的光学折射设备,第一致动器被配置成使光学折射设备振荡。该系统还包括反射镜,该反射镜光学耦合到光学折射设备并耦合到被配置成使反射镜振荡的第二致动器。该系统还包括通信地耦合到第一致动器和第二致动器的一个或多个控制器。控制器被配置成控制光学折射设备的振荡和反射镜的振荡以竖直和水平转向一个或多个光束以照射视场内的一个或多个物体,获得基于照射视场内的一个或多个物体的被转向的一个或多个光束而生成的返回光,并将返回光重定向到设置在系统中的收集透镜。
技术研发人员:王浩森,李义民
受保护的技术使用者:图达通智能美国有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!