一种水下大型潜航器水面观测系统及观测方法
本发明涉及海洋航行技术及水下潜航器,具体涉及一种水下大型潜航器水面观测系统及观测方法。
背景技术:
1、本发明中所述大型潜航器是指排水量达50吨以上的潜航器,包括有人潜艇或无人潜航器等。
2、在大型潜航器执行作业任务时,时常需要上浮至水面利用全球定位系统进行导航误差修正或实现对水面船只系泊情况的观测,然而上浮水面若有其他船只、海上监测系统,则大型潜航器会面临极大风险。研究表明,在天气良好的情况下,长度为12m的大型潜航器其光学隐蔽深度仅为25-35m,此时,在200m高空仅通过目力、望远镜或光学相机即可观测到大型潜航器,对大型潜航器的安全与隐蔽性构成极大威胁。
3、除上述缺陷外,大型潜航器上常用的海面观测系统常出现(1)上浮过程中,由于对水面船只运动情况不明,存在碰撞的风险。(2)在海况恶劣的环境下,观测系统的准确性较差。(3)现有算法对水面目标的识别与稳定跟踪能力不足。(4)现有技术中,由升降杆控制的摄像头伸出水面的高度不足,易受海浪影响。(5)现有技术中,水面观测模块抗倾覆性较差。(6)现有技术大多采用单摄像头,不能实现360°全方位同时观测。(7)与水下平台刚性连接的水面观测模块在观测过程中会受到水下平台运动的影响。(8)在夜晚及海雾等可视性较差的情况下,单纯的光学摄像头无法完成观测任务。(9)水面观测模块未携带北斗模块,导航定位需要潜航器浮出水面。等多项问题。
4、因此,发明一种可实现在水下自由释放及回收、在恶劣海况下实现稳定观测跟踪、具备卫星定位功能、鲁棒性好的水面观测装置对保障大型潜航器的安全隐蔽性航行具有重要意义。
技术实现思路
1、针对现有技术存在的问题,本发明的目的在于针对上述问题,提供一种能够精确识别水面船只或障碍物以规避碰撞的水下大型潜航器水面观测系统及观测方法。本发明中所述大型潜航器是指排水量达50吨以上的潜航器,本系统可广泛适用于有人潜艇或无人潜航器等。
2、为实现上述目的,本发明提供一种水下大型潜航器水面观测系统,所述系统包括:
3、水面目标检测识别单元,用于采集水面图像数据并识别目标,实时传输至操控显示终端,水面目标检测识别单元具有载压水模块,通过压载水量调节自身的重力与浮力;
4、水下收放装置,用于对水面目标检测识别单元进行释放和回收操作;
5、操控显示终端,作为水面观测系统的指挥控制中心,可对水面目标检测识别单元传回的图像数据以及进行采集、处理和显示,实现对水面目标检测识别单元和水下收放装置的控制;
6、其中,水面目标检测识别单元还包括目标识别模块、ais接收器和ais决策模块;目标识别模块和ais接收器分别将并将水面图像识别结果和从ais获取的周边水面船只系泊信息传输至ais决策模块进行判断,ais决策模块将判断结果实时传输至操控显示终端,进行汇总决策。
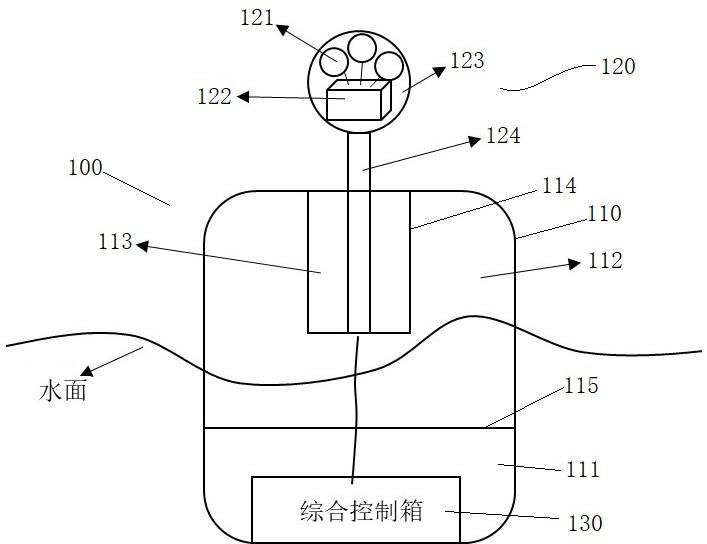
7、进一步,所述水面目标识别单元包括低密度浮标舱体、水面成像组件、综合控制箱、压载水模块和深度计;
8、所述水面成像组件通过摄像头采集海面目标光学影像,完成360°视野范围内观测;综合控制箱包含通信主控模块、目标识别模块、目标跟踪模块、磁罗经及北斗模块,实现供电、定位、定向功能;目标识别模块和目标跟踪模块通过大气光强值估计和图像对应透射率图,为水面目标检测识别单元提供算法支撑;压载水模块由压载水舱和水泵组成,用于水面目标检测识别单元释放与回收时通过压载水量调节系统的重力与浮力。
9、进一步,其中水面成像组件包括多个全景相机、自稳云台以及防水透明罩和升降杆,全景相机安装在自稳云台上,之后两者置于防水透明罩内,防水透明罩与升降杆连接,使用时升降杆伸出,使水面成像组件置于浮标舱体上方且高于水面设定距离。
10、进一步,低密度浮标舱体分为综合控制箱室、压载水舱室和水面成像组件回收安置区,水面成像组件回收安置区位于压载水舱室中心并通过浮标舱体的第一隔板与压载水舱室隔离开,第一隔板形成的圆柱形内腔成为水面成像组件回收安置区;综合控制箱室位于低密度浮标舱体的下层,通过低密度浮标舱体的第二隔板与压载水舱室隔离开。
11、进一步,所述自稳云台包括由方位座、俯仰球及支撑结构组成的转台,和由陀螺、控制单元、伺服执行机构组成的陀螺伺服系统。
12、进一步,所述升降杆采用气动式,通过对气缸内注入与排出空气实现气缸上升与下降运动。
13、进一步,水下收放装置包括释放器、主驱动电机、牵引电机、牵引导向部、压绳装置、排线装置和绞车框架;回收时牵引电机将拖拽力作用至线缆上,使得线缆受到拉力,向绞车框架内回收,之后经压绳装置和牵引导向部到达排线装置,最后在主驱动电机作用下将线缆圈起回收,由此实现对水面目标识别单元的回收。
14、进一步,所述释放器可实现在接收到操控显示终端指令后释放水面目标识别单元,并在回收水面目标识别单元时实现锁紧功能;释放器为声学释放器或机械锁紧装置。
15、进一步,ais决策模块获取ais接收器所采集的船只系泊及航行信息,并结合北斗模块传回的信息及目标识别模块的水面目标识别结果进行数据融合与船只信息综合绘算决策;结合ais接收器采集的信息与目标识别模块识别到的船只信息,通过ais决策模块内嵌程序对两者船只信息的时间和空间情况进行船只信息的相关性判断,将达到置信度阈值的船只判断为同一目标,标记为ais识别船只;其余为ais接收器未接收到但被目标识别模块识别出的船只标记为ais未识别船只;将ais未识别船只的信息进行重点标记,并发送至目标跟踪模块;ais决策模块将判断结果发送至操控显示终端进行汇总决策;对ais未识别船只通过目标跟踪模块进行进一步跟踪观测,并将观测结果实时汇总至操控显示终端。
16、另一方面,本发明提供一种水下大型潜航器水面观测方法,所述方法包括以下步骤:
17、s1.水下大型潜航器需要对海面进行观测时,可通过操控显示终端对水下收放装置及水面目标识别单元发出释放指令,在收到释放指令后水下收放装置中的释放器从锁紧状态转变为释放状态,水面目标识别单元内部压载水舱开始排水,此时水面目标识别单元浮力大于重力,开始上浮;
18、s2.在水面目标识别单元上浮至露出水面并达到设定深度时,停止放缆,升降杆开始伸出,使成像组件置于浮标舱体上方且距水面预定距离;在操控显示终端启动水面目标检测系统以及对观测设备的参数进行设置及控制;此时水面目标检测识别单元开始工作,结合ais接收器采集的信息与目标识别模块识别到的船只信息通过ais决策模块自动进行决策,将采集决策结果实时传输回操控显示终端,同时利用成像组件对水面的舰船目标进行观测、识别和跟踪,并将采集到的水面图像及识别结果实时传输至操控显示终端;
19、s3.在完成对水面目标相关信息的采集后,由操控显示终端对水下收放装置及水面目标识别单元发出回收指令,水面目标识别单元中的升降杆回收至安置区,压载水舱往水舱内注水,直到整个水面目标识别单元重力大于等于浮力;
20、s4.水下收放装置开始以恒张力模式回收零浮力线缆,并在操控显示平台上显示张力及收缆速度,直到水面目标识别单元被收回,水下收放装置的释放器感应到水面目标识别单元,从释放状态转变为锁紧状态,完成一次观测流程。
21、本发明的有益效果如下:
22、与现有技术相比,本发明具有以下优势:
23、(1)采用ais决策模块与水面成像组件共同实现对周边水面船只系泊情况的观测及自身的定位,对ais系统上未出现的船只或障碍物也可通过水面成像组件进行观测识别,可最大程度上对水面情况无遗漏的采集,规避因大型潜航器上浮导致与水面船只或障碍物发生的碰撞。
24、(2)在海况恶劣的环境下,利用带陀螺稳定的指向器有效隔离洋流的影响, 使得安装在其中的摄像机镜头始终对准目标,极大程度上克服了海面波动、海浪颠簸对图像影响。通过基于偏振光学的大气光强值算法,图像自动跟踪算法等提高观测系统的整体性能。通过操控显示终端控制、气动式升降布局、带陀螺稳定的指向器、抗倾覆性强的浮标体等使得观测系统在提高升降杆最大高度的同时,有效抑制了洋流和海风对观测系统的影响。
25、(3)采用3组摄像头协同工作,实现360°全方位无死角实时观测。
- 还没有人留言评论。精彩留言会获得点赞!