具有用于感测低能量反射的检测器的扫描激光装置和方法与流程
背景技术:
1、已经针对各种应用(包括物体检测)开发并实施了扫描激光装置。例如,已经开发了光检测和测距(lidar)系统以生成表面的3d图,其中3d图描述了表面上的深度变化。这种物体检测和绘制深度图已经在各种应用(包括物体和运动感测、导航和控制)中使用。例如,这种lidar装置正用于自主车辆的导航和控制,包括用于运输和制造的自主装置。
2、一些lidar系统中的一个限制是缺乏检测器可靠性和灵敏度。例如,在一些lidar系统中,噪声可能会阻碍低能量反射的可靠性的可靠检测,并且因此干扰系统的操作。因此,仍然需要用于lidar系统和其他扫描激光装置中的检测的改进的系统和方法。
技术实现思路
技术特征:
1.一种设备,包括:
2.根据权利要求1所述的设备,其中,所述第一传感器具有第一传感器视场,其中所述第一传感器视场与扫描到所述扫描场中的所述激光脉冲光学对准,并且其中所述第二传感器具有第二传感器视场,其中所述第二传感器视场与扫描到所述扫描场中的所述激光脉冲未光学对准。
3.根据权利要求2所述的设备,其中,所述第一传感器的第一传感器视场和所述第二传感器的第二传感器视场具有在1度至3度之间的光学对准差。
4.根据权利要求1所述的设备,其中,所述第一传感器被配置有具有与所述设备相距2米至6米之间的工作距离的光学器件。
5.根据权利要求4所述的设备,还包括:短程传感器,所述短程传感器被配置成通过所述光学组件接收来自所述扫描场内的所述激光脉冲的反射,所述短程传感器被配置有具有与所述设备相距.1米至2米之间的工作距离的光学器件。
6.根据权利要求5所述的设备,其中,所述第一传感器包括第一硅光电倍增器,并且其中所述第二传感器包括第二硅光电倍增器,并且其中所述短程传感器包括光电二极管。
7.根据权利要求1所述的设备,其中,所述第一传感器通过第一光圈和第一光管被光学地耦接到所述光学组件,并且其中所述第二传感器通过第二光圈和第二光管被光学地耦接到所述光学组件。
8.根据权利要求1所述的设备,其中,所述光学组件中的所述光学元件包括至少一个扫描镜和至少一个扩展透镜。
9.根据权利要求1所述的设备,其中,所述感测电路包括减法装置,以从所述第二传感器的输出中减去所述第一传感器的输出。
10.根据权利要求9所述的设备,其中,所述感测电路包括第一校准电路,以校准从所述第一传感器的输出减去所述第二传感器的输出。
11.根据权利要求10所述的设备,其中,所述感测电路还包括第二校准电路,以校准所述扫描场中的物体的检测的阈值。
12.根据权利要求1所述的设备,其中,所述第一检测器还包括第三传感器,所述第三传感器被配置成接收来自所述光学组件内的激光脉冲的背反射,而不接收来自所述扫描场内的物体的显著反射,并且其中所述感测电路被附加地耦接到所述第三传感器。
13.根据权利要求1所述的设备,还包括:第二检测器,所述第二检测器被配置成通过第二光学组件接收来自所述扫描场内的激光脉冲的激光脉冲的反射,所述第二光学组件与所述光学组件的所述光学元件分开且不包括所述光学组件的所述光学元件。
14.根据权利要求1所述的设备,还包括:
技术总结
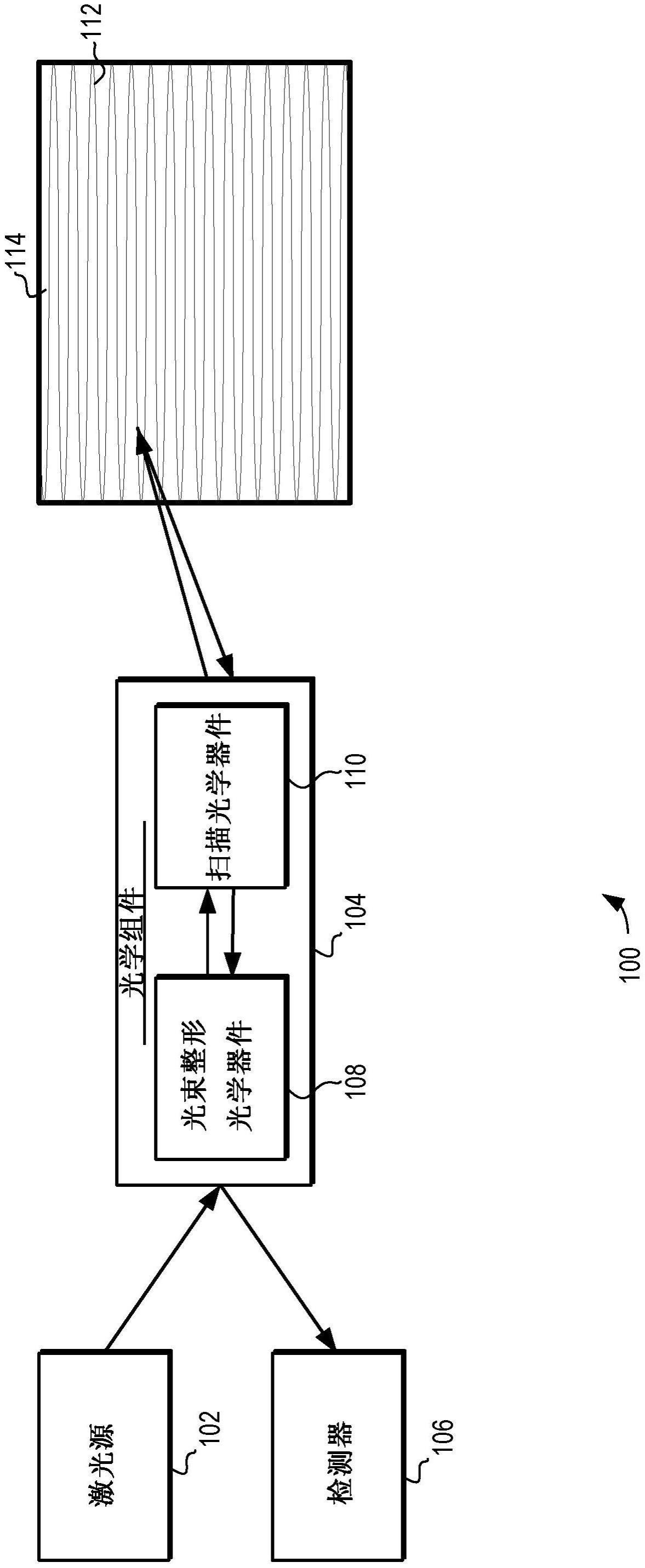
本文描述的实施例提供了可以促进增加扫描激光装置(100)中的检测器灵敏度和可靠性的系统和方法。具体地,该系统和方法利用具有多个传感器的检测器,该多个传感器被配置成接收来自扫描场(114)内的物体的激光脉冲的反射。这些多个传感器被配置成通过用于将激光脉冲扫描到扫描场的相同光学组件(104)来接收这些反射。此外,多个传感器被配置成至少部分地消除来自光学组件本身内的背反射的影响。消除来自光学组件内的背反射的影响可以提高检测器的灵敏度,特别是对于来自扫描场内的激光脉冲的低能量反射的检测。
技术研发人员:詹姆斯·迪安,克里斯托弗·坎农,阿尔加·诺则恩三世,乔尔·桑德加特
受保护的技术使用者:微视公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!