提供组合的地图信息的制作方法
本发明涉及提供组合的地图信息。本发明特别是涉及提供涉及相同区域的两张不同地图的信息。
背景技术:
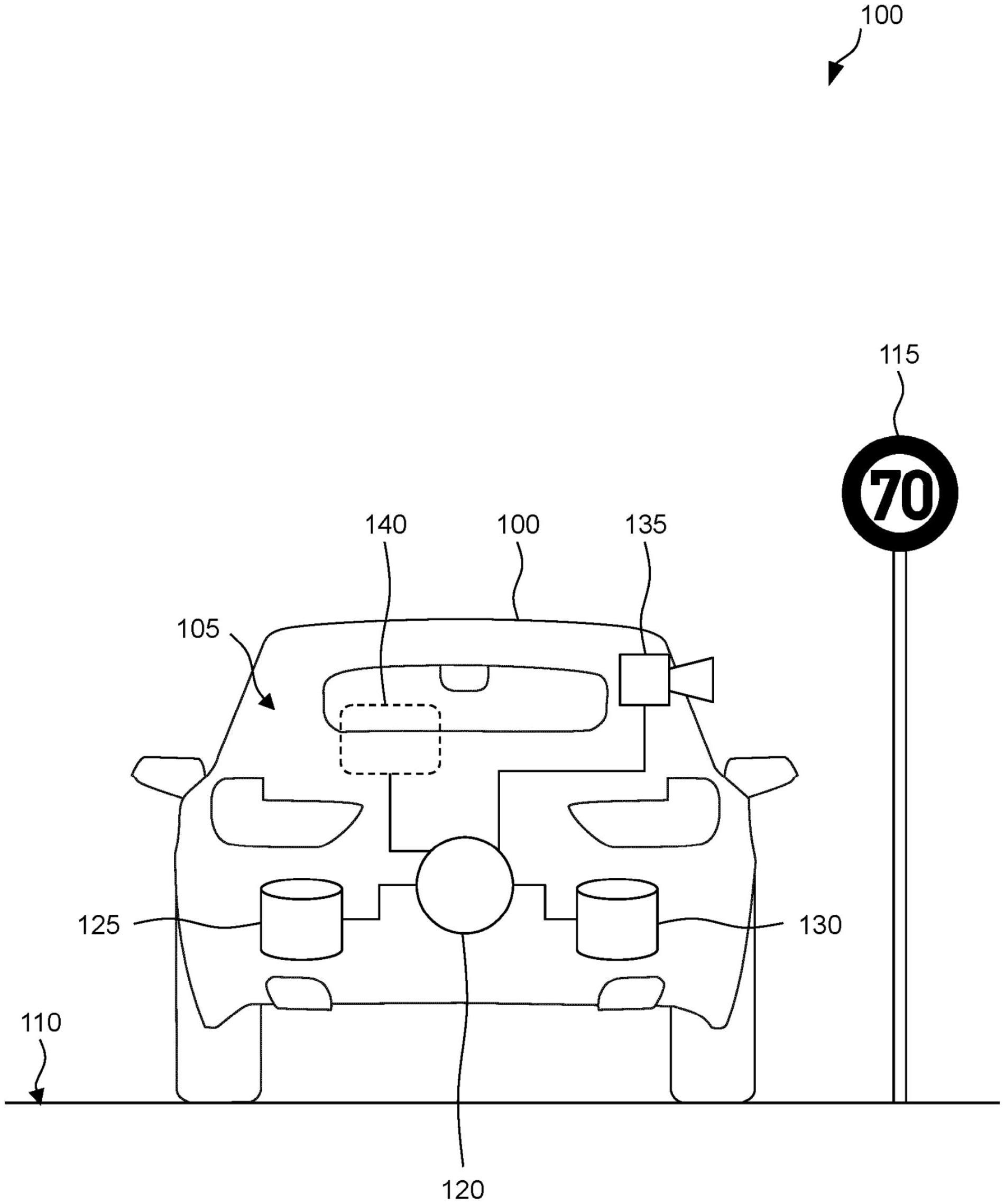
1、车辆包括平视显示器(head-up-display,hud),所述平视显示器被设置用于,利用存储的信息丰富对车辆紧邻的周围环境的印象并且向驾驶员展示所述印象。这些信息特别是可以来自地图存储器,在该地图存储器中存储有地图,所述地图例如包括在预确定的区域中的路标或街道。
2、在现代机动车中可以提供不同的这种地图。例如,第一地图可以足够精确以便允许在纵向和/或横向方向上自动控制车辆。这种地图必须不断地更新,因此一般仅有针对围绕车辆的有限的视界的更新的地图信息可供使用。第二地图可以用于车辆的导航并且覆盖更大范围、例如国家、地区或大陆。车辆可行驶的道路网一般变化相对缓慢,因此第二地图的信息可能具有以月为单位给出的新旧性。此外,第二地图一般不如第一地图详细,并且在第二地图中,定位元素的位置可能比第一地图的位置更偏离现实。
3、通常期望的是在平视显示器中显示来自这两种地图的信息。例如,可以同时显示来自第二地图的充电桩的位置和来自第一地图的关于路段阻塞的当前信息。为了进行合并(conflation),例如已知被称为统计参考、动态参考或位置参考的方案。然而,来自不同地图的信息的合并一般是耗费且有误差的,并且可能不是始终产生单义的结果。
技术实现思路
1、本发明的目的在于,提供一种改进的用于合并两张不同地理地图的信息的技术。本发明借助于独立权利要求的技术方案来实现所述目的。各从属权利要求给出优选的实施方式。
2、根据本发明的第一方面,一种用于在车辆上提供组合的地图信息的方法包括以下步骤:确定第一地图到所述车辆的周围环境的第一映射;确定第二地图到第一地图的第二映射;所述第二映射将地标在第一地图中的位置映射到同一地标在第二地图中的位置;以及提供第一地图和第二地图的关于环境的信息。
3、在这两个地图之间的误差可以通过地标在所述两个地图中的位置的差异来补偿。因此,第二地图的信息可以更好地关联到第一地图上。然后,这些信息可以共同地关联到围绕车辆的现实。也可以以采用相反的方案,其中,将第一地图的信息关联到第二地图上。
4、在各地图之间的映射可以需要相对少的计算资源,并且可以由车辆的车载的处理装置在可接受的时间内执行。通过映射产生的误差可以是小的。然而应当注意的是,从不同的地图融合的位置信息可以分别仅具有与原始地图中的信息相同的精度。
5、当然,所述方法也可以借助于级联或与预确定的地图相关联来关于多个地图使用。在级联的情况下,第一地图可以关联到第二地图,第二地图可以关联到第三地图,以此类推。在第二种情况下,第一地图可用作第二地图、第三地图等的参考。这两种方案的混合形式也是可行的。
6、一般地优选的是,所述两个地图具有不同的特性。特别是,各地图可以在其精确性、其细节丰富度或其新旧性方面不同。在一种优选的实施方式中,所述第一地图设置用于关于车辆的环境来控制车辆,并且所述第二地图设置用于在道路网上导航车辆。这两个地图都可以作为矢量地图存在。第一地图可以比第二地图更新并且更详细。此外,在第二地图中对象位置的精确性可以高于第一地图中对象位置的精确性。一般,关于确定的对象的信息存储在这两个地图中。但除了地标之外这不是强制必须的。
7、此外优选的是,各地图分别具有高的相对精度。换言之优选的是,所述地标在各地图中的位置分别与在同一地图中的其他对象的位置相匹配。例如,在同一地图中,在地标与其他地标之间的距离可以相对精确地匹配于在现实中在相应对象之间的距离。各距离与实际距离的平均偏差或最大偏差可被称为相对精度。
8、而绝对精度表示地标在各地图中的一个地图中的位置与该地标在现实中的位置的最大距离或平均距离。两个地图的相对精度可以明显高于绝对精度。特别是优选的是,在所述两个地图中的相对精度小于约5m、进一步优选地小于约1m。绝对精度可以明显更大,在第二地图中,相对于现实的大于10m、大于50m或大于100m的位置偏差也可以是可容忍的。
9、可以基于地标的位置在这两个地图之间的偏差来确定第二映射。一个地图的与另一个地图相关联的其他信息的位置可以通过第二映射获得如下绝对精度,该绝对精度可以相应于相对精度。所述映射特别是可以包括在南北方向上和/或在东西方向上的平移。
10、特别优选的是,基于多个地标的位置在这两个地图之间的偏差来确定第二映射。在此,这些地标可以相对于车辆的位置位于预确定的最大距离之内。通过考虑多个地标可以确定更精确的第二映射。此外,第二映射可以包括附加的变换、特别是旋转、剪切、拉伸或压缩。
11、由于在地图之间的绝对偏差一般不是在地图的有效范围上恒定的,因此特别是可以观察如下地标,所述地标相对于车辆的位置具有小于例如约100m的距离。在一种实施方式中,仅考虑如下地标,所述地标不比借助光学传感器从车辆出发要确定的距离更远。特别是当第一地图和第二地图的信息应当呈现给车辆上的人员时,已经可以以这种方式排除位于所述人员可视范围之外的信息。通过选择相对小的最大距离,可以最大化第二映射的精度,而不必丢弃重要的待显示的信息。
12、可以以任意方式确定在所述两个地图中的地标。地标可以被分类、例如分类为路标或道路标记;或者地标可以不分类、例如作为一般的细长物体、边缘、树木、路灯、墙壁、房屋角落等。地标也可以包括一定数量的点,所述点例如借助于雷达传感器或光达传感器检测,这些点一般形成一定的聚集,所述聚集可以与其他对象或噪声区别开。
13、在一种实施方式中,基于车辆对地标的多次观察并且基于分别确定的车辆位置来确定该地标在地图中的位置。例如,可以由车队中的多个车辆收集对地标的记录并且作为构建地图的基础。在每次观察时,可以关于车辆的相应位置确定地标的位置,从而得到地标的绝对位置。
14、此外优选的是,在各地图中的相互对应的地标分别带有相同的标识符。因此,可以迅速且明确地在所述两个地图中确定彼此对应的地标。标识符可以由一个中央主体统一分配。例如,收集所述多个车辆的观察的主体可以分配标识符。由此可以避免在所述两个地图中相互对应的地标之间的错配或者避免无法建立在所述两个地图中相互对应的地标之间的关系。
15、在另一种实施方式中,在各地图中的一个地图中的路标分别配设有附加信息,所述附加信息允许在另一个地图中确定所述路标的标识符。因此,可以继续使用地图制造商所使用的用于所包括的地标或其他对象的标识符系统。例如可以在地图的预确定的层中存储提示。在此,所述提示特别是可以包括目标地图的标识符、不同目标地图的多个标识符、映射规则或对转换服务的参阅,所述转换服务将一个地图的标识符转换成另一个地图的标识符。
16、所述第一地图的信息和所述第二地图的信息可以与所述信息所涉及的对象在空间上直接相关联地呈现给车辆上的人员。所述呈现可以通过第一映射精确地进行。所述信息可以扩展、补充所述对象或叠加在所述对象上。
17、特别优选的是,以关于所述对象的增强现实的形式来呈现所述信息。在一种改进方案中,例如以人工现实的形式来显示也是可行的,其中,不对环境进行直接的观察。
18、在另一种实施方式中,借助所述方法产生映射规则,以便将各地图中的一个地图中的地标映射到另一地图中的地标。所述映射规则例如可以包括表格或者可以实现为服务,该服务可由以其中一个地图进行工作的任意设备自动调用。
19、借助所述方法确定的地图合并可以用于提供给车辆之外的其他服务、例如确定路线,该路线具有关于所述两个地图的预确定的特性。在一种变型方案中可以支持大量数据的处理,其方式为,例如基于第二地图的信息针对第一地图的一个地点确定在预确定的距离之内的空闲停车位的概率。
20、根据本发明的第二方面,一种用于在车辆上提供组合的地图信息的设备包括:用于探测所述车辆的环境的装置;和处理装置。在此,所述处理装置设置用于:确定第一地图到车辆的周围环境的第一映射;确定第二地图到第一地图的第二映射;和提供第一地图的和第二地图的关于环境的信息。
21、所述设备可以设置用于实施在此所描述的方法的全部或部分。为此,所述设备可以包括处理装置,所述处理装置包括可编程的微型计算机或微控制器。所述方法可以以具有程序代码段的计算机程序产品的形式存在。计算机程序产品也可以存储在计算机可读的数据载体上。所述方法的特征或优点可以转用到所述设备上,或者反之亦然。
22、在另一种优选的实施方式中,所述设备还包括平视显示器以用于向车辆上的人员提供所述关于环境的信息。所述车辆特别是可以包括机动车、例如摩托车、轿车、载重汽车或公共汽车。所述人员特别是可以包括车辆或机动车的驾驶员。
23、根据本发明的又一方面,一种车辆包括在此所述的设备。
- 还没有人留言评论。精彩留言会获得点赞!