用于确定横摆角速度偏移值的方法、系统和计算机程序产品与流程
本发明涉及一种用于确定横摆角速度偏移值的方法,该横摆角速度偏移值表示机动车辆的横摆角速度传感器的横摆角速度测量值的偏移。本发明还涉及一种用于确定横摆角速度值的方法。确定横摆角速度偏移值或横摆角速度值也可以理解为对其进行估计。本发明还涉及用于确定横摆角速度偏移值和/或横摆角速度值的相应控制装置、用于机动车辆的相应传感器装置、相应计算机程序产品及相应机动车辆。
背景技术:
1、许多车辆系统或驾驶员辅助系统需要可靠的横摆角速度(或横摆角速度值)作为其计算的输入变量或输入值,例如用于定位机动车辆、确定机动车辆的定向、估计机动车辆的自身运动等。横摆角速度传感器尤其是陀螺仪的横摆角速度的精度主要受两个因素影响:随时间和/或温度的偏差和漂移(或测量失真)。
2、补偿这种不准确性的常用方法是当车辆在第一情况下沿直线运动或者在第二情况下静止时确定或估计横摆角速度偏移值。例如在de10201811528a1中公开了这样一种方法。在第一和第二情况下,假设车辆的理论横摆角速度为0°/s。然后,常用方法在确定横摆角速度时将偏移值考虑在内,并相应地校正最后的横摆角速度值。
3、ep1264749b1公开了一种用于补偿用于测量机动车辆的横摆角速度的系统的方法,其中该系统包括横摆角速度传感器,并且从横摆角速度传感器信号中滤除信号的低频分量。如果滤波后的信号在预定时间间隔内没有超过预定幅度,则该系统与在该时间间隔结束的瞬间出现在传感器输出端的信号相匹配。
4、de19736199a1公开了一种用于中性点的估计装置,其包括第一检测单元,该第一检测单元检测汽车正在进行旋转运动的事实。第二检测单元检测从横摆角速度传感器的输出信号获得的横摆角速度的导数的值的收敛。在第一检测单元检测到正在执行旋转运动之后,当由第二检测单元检测到横摆角速度导数的值收敛时,用于中性点的检测单元借助于横摆角速度传感器的输出信号来确定横摆角速度传感器的中性点。在de19736199a1中,基于横摆角速度传感器的输出信号确定车辆的直线运动。
5、文献us9193382b2描述了一种用于计算横摆角速度信号的偏移的方法,该方法可以至少部分地基于代表驱动轮角度、车轮速度和横摆角速度的信号。可以确定这些信号并进行阈值比较,并且可以至少部分基于阈值比较的结果来确定横摆角速度信号。
6、文献de10201811528a1涉及一种用于确定惯性测量单元的偏移值的方法,其中偏移值是指机动车辆的静止运动状态。使用惯性测量单元在第一时刻获取第一组测量值。第一组测量值包括机动车辆的一个轴线的转向角的测量值和机动车辆的一个或多个车轮的转速的多个测量值。第一组测量值然后用于检查机动车辆的静止运动状态是否存在。在第二时刻,以与第一时刻相同的方式采集第二组测量值。第二组测量值用于再次检查机动车辆的静止运动状态是否存在。根据第一和第二组测量值以及根据机动车辆的静止运动状态,确定惯性测量单元的偏移值。在de10201811528a1中,机动车辆的静止运动状态的特征在于机动车辆的静止或匀速直线运动。
7、现在已经发现,当机动车辆静止但绕其自身轴线旋转时会出现问题。在这种情况下,横摆角速度大于0°/s。例如当车辆在转盘上时,可能会出现这种情况。在这种情况下,所测量的横摆角速度值不是偏移,而是实际测量值。
8、这种转盘目前用于例如公共停车场,例如主要在日本,或者用于私人住宅或其车道,例如在美国。这种转盘特别适用于几乎没有机动空间或空间受限的情况。转盘因此以最小的操作空间旋转车辆。
9、现有技术的当前系统或方法估计或确定车辆静止时的横摆角速度偏移值。现有技术中的系统或方法没有考虑或检测车辆是否在旋转转盘上。对于车辆位于旋转转盘上的情况,这将导致对横摆角速度偏移值的不准确估计。
技术实现思路
1、本发明的目的是提供方法、控制装置、传感器装置、计算机程序产品和机动车辆,它们可以用于更可靠地确定横摆角速度偏移值或横摆角速度值。
2、这个目的通过根据独立权利要求的方法、控制装置、计算机程序产品和机动车辆来实现。
3、本发明涉及一种用于确定(或估计)横摆角速度偏移值的方法,该横摆角速度偏移值构成机动车辆的横摆角速度传感器的横摆角速度测量值的偏移。该方法包括以下步骤:随时间从横摆角速度传感器接收多个横摆角速度测量值,其构成横摆角速度测量信号;检查机动车辆是否静止;如果是,则基于横摆角速度测量信号确定横摆角速度偏移值。
4、根据本发明,该方法现在包括以下步骤:确定在横摆角速度测量信号中形成斜率的横摆角速度测量值;并且忽略形成斜率的横摆角速度测量值,以便确定横摆角速度偏移值。这些步骤尤其可以在确定横摆角速度偏移值的步骤中或之前执行。忽略的步骤也可以理解为去除和/或滤除形成斜率的横摆角速度测量值。因此,这些值不用于确定或估计横摆角速度偏移值。
5、通过确定在横摆角速度测量信号中形成或具有斜率的横摆角速度值,可以说,检测机动车辆是否在旋转转盘上。如果横摆角速度测量值形成或具有斜率,则可以断定机动车辆在该时刻(当机动车辆处于静止时)位于旋转转盘上。这些横摆角速度测量值并不构成横摆角速度偏移,而是实际测量的横摆角速度值。因此,在确定横摆角速度偏移值时,应忽略或消除这些。
6、通过确定在横摆角速度测量信号中形成斜率的横摆角速度测量值,因此可以检测出机动车辆虽然静止但是否位于转盘上。如果检测到机动车辆位于转盘上,则执行忽略或去除所确定的形成或具有斜率的横摆角速度测量值的步骤,以确定横摆角速度偏移值。因此,为了确定横摆角速度偏移值,仅使用横摆角速度测量信号的一部分的横摆角速度测量值,其中机动车辆静止但不旋转。这导致更精确地确定或估计横摆角速度偏移值。
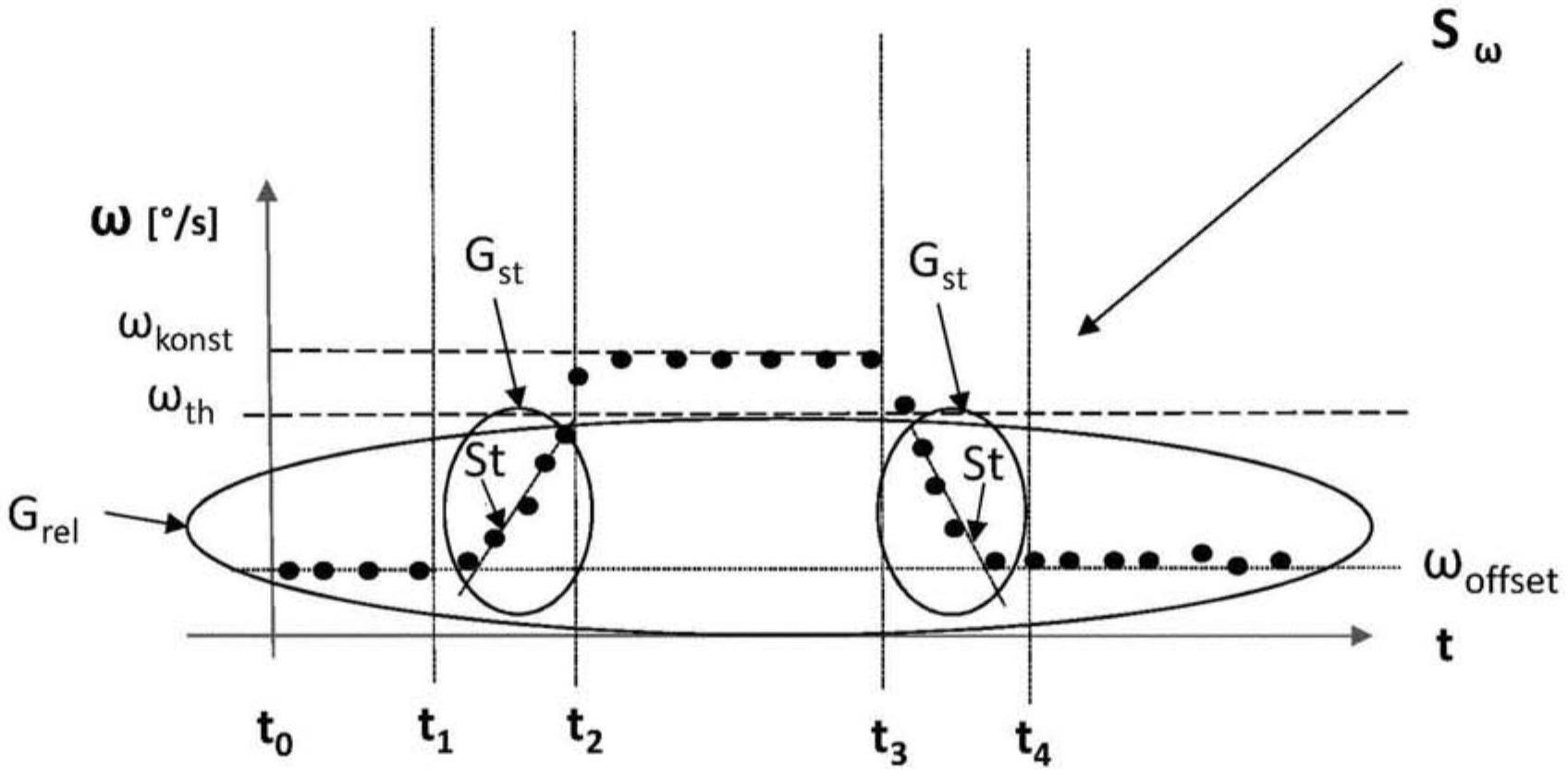
7、形成斜率的横摆角速度测量值可以例如通过统计过程来确定。特别地,形成斜率的横摆角速度测量值可以通过用横摆角速度测量值或其子集的(简单)或对其形成线性回归来确定。然后可以检查如此确定的直线的斜率(例如它是否足够陡),特别是该斜率是否超过斜率阈值(例如斜率>5%)。然后可以检查哪个横摆角速度测量值(例如来自子集)属于该斜率。这些属于斜率的横摆角速度测量值则被忽略。然后,不属于斜率的其他横摆角速度测量值可以用于确定横摆角速度偏移值。这种类型的斜率确定也可以用有限的存储空间和/或计算时间来执行,因此不需要过多的资源。然而,其他已知类型的斜率确定当然也是可能的。
8、本发明的另一方面涉及一种用于确定(或估计)横摆角速度值的方法,包括用于确定横摆角速度偏移值的方法的步骤,特别是根据本说明书中的方面或实施例。该方法还包括基于横摆角速度测量信号(或随时间变化的横摆角速度测量值)和所确定的横摆角速度偏移值来确定横摆角速度值或横摆角速度。
9、因此,该方法使用所确定的横摆角速度偏移值来确定横摆角速度值或横摆角速度。然后可以使用横摆角速度偏移值ωoffset来调整横摆角速度值或上次或当前实际测量的横摆角速度值ωreal。这允许确定横摆角速度值或横摆角速度ω。这可以根据以下公式进行:
10、ω(t)=ωreal+ωoffset(t) [1]
11、其中:ωoffset(t)=偏差+漂移(t) [2]。
12、已经发现,如果在确定横摆角速度偏移值时,即这里在公式[2]中,车辆处于静止状态但绕其自身轴线(或(竖直)车辆轴线)旋转,则会出现问题。在这种情况下,横摆角速度大于0°/s。例如,当车辆在转盘上时,可能会出现这种情况。这个问题通过根据本发明的用于确定横摆角速度偏移值的方法得以解决。
13、例如,转盘可以是车辆转盘或车道转盘。这种转盘是旋转的(或可旋转的)盘(或板),其被设计成旋转位于其上的车辆,特别是围绕其自身(竖直)轴线。这种转盘尤其可以是圆形的盘或板,机动车辆可以在其上绕其自身(竖直)轴线移动。因此,当机动车辆停在转盘上时,转盘绕其轴线旋转。这种转盘通常安装在地面上或凹入地面。这种转盘可以位于车道或车库中,或者可以安装在车道或车库的地面上,或者凹入其中。转盘可以手动或通过机动装置旋转或转动。这种转盘的目的或好处通常是简化和/或更安全地将机动车辆驶出车道或车库。
14、在一实施例中,检查机动车辆是否静止的步骤包括检查机动车辆的速度是否等于或近似为零和/或机动车辆的车轮脉冲是否等于或近似为零。特别地,在此可以检查,对于预定的去抖动时间(例如至少或约400ms),来自机动车辆的所有车轮的增量脉冲是否等于或约为零。
15、在一实施例中,该方法可以特别包括将横摆角速度测量信号(或多个横摆角速度测量值)与阈值进行比较。特别地,每个横摆角速度测量值可以单独与阈值进行比较。具体地,阈值可以具有约或最大3°/s的值,特别是约或最大2.5°/s,特别是约1°/s。具体地,低于阈值的横摆角速度测量值可以包括转盘开始旋转或停止旋转时的横摆角速度测量值。
16、因此,只分析一组可允许的横摆角速度测量值。这些也可以称为相关横摆角速度测量值。为了使横摆角速度测量值有效或相关,它必须在预定范围内。这通过阈值来检查,特别是检查这些值是否低于阈值。该范围或阈值可以是预定的或配置的值,特别是取决于特定的横摆角速度传感器。然而,横摆角速度测量值仅在一个范围内或低于阈值是不够的。横摆角速度测量值可能低于阈值,但可能是转盘的转动或旋转运动的一部分(特别是如果转盘开始转动或停止转动),因此对于确定横摆角速度偏移值可能是无效的。因此,根据本发明,在横摆角速度测量信号中形成斜率的横摆角速度测量值被确定,并且被忽略或滤除以确定横摆角速度偏移值。特别地,如果足够的(过滤的)值可用或存储在存储器中,则可以确定横摆角速度偏移值。
17、在一实施例中,该方法可以包括确定横摆角速度测量信号的低于阈值的相关横摆角速度测量值。特别地,对于每个横摆角速度测量值,可以单独确定它是否低于阈值。如果是这种情况,此横摆角速度测量值可被分类或存储为相关的横摆角速度测量值。因此,为了确定横摆角速度偏移值,仅考虑可能有效的或相关的横摆角速度测量值。
18、该方法尤其可以包括将低于阈值的所确定的横摆角速度测量值存储在存储器中,尤其是存储在环形缓冲器(例如最大缓冲器长度20)中。该方法尤其可以包括检查存储器中是否存储了足够数量的确定的横摆角速度测量值(例如在10和20个值之间,或者确切地说是20或10个值)。在存储器中是否存储了足够数量的确定的横摆角速度测量值尤其取决于横摆角速度测量值或横摆角速度测量信号的更新速率或者相应的软件程序或用于确定横摆角速度偏移值或横摆角速度值的软件模块。例如,对于约40ms的更新速率,存储器中的10个值可能就足够了。在约20ms的更新速率下,例如存储器中的20个值可能是足够的数量。
19、在一实施例中,确定形成横摆角速度测量信号中的斜率的横摆角速度测量值的步骤可以基于所确定的低于阈值的相关横摆角速度测量值来执行。还可以检查是否有足够的横摆角速度测量值(例如在存储器中)来测量斜率。
20、在一示例性实施例中,确定形成横摆角速度测量信号中的斜率的横摆角速度测量值可以包括用横摆角速度测量值或者对其形成(简单的)线性回归,特别是存储器中的横摆角速度测量值或者存储器中最近的横摆角速度测量值(例如存储器中最近的3-4个横摆角速度测量值)。特别地,低于阈值的相关横摆角速度测量值可以用于此目的。然后可以检查如此确定的直线的斜率(例如它是否足够陡),特别是该斜率是否超过斜率阈值(例如斜率>5%)。然后可以检查哪些横摆角速度测量值(尤其是存储器中的值)属于该斜率。属于斜率的这些横摆角速度测量值将被忽略。然后,不属于该斜率的其他横摆角速度测量值可以用于确定横摆角速度偏移值。
21、在一实施例中,忽略形成斜率的所确定的横摆角速度测量值可以包括从相关的横摆角速度测量值中去除(或滤除)低于阈值的这些值。然后,只有剩余的横摆角速度测量值可用于确定横摆角速度偏移值。换句话说,形成斜率的横摆角速度测量值不用于确定横摆角速度偏移值。
22、特别地,忽略形成斜率的所确定的横摆角速度测量值可以包括从存储器中去除这些值。特别地,可以检查存储器中是否存储足够数量的确定的横摆角速度测量值(例如在10和20个值之间,或者正好20或10个值)。因此,可以检查存储器中是否存在或保持足够的横摆角速度测量值,以便随后计算横摆角速度偏移值。
23、特别地,可以通过(存储器中)剩余的横摆角速度测量值来确定横摆角速度偏移值。特别地,剩余的横摆角速度测量值可以是(存储器中的)横摆角速度测量值,其是在扣除或忽略或去除形成斜率的所确定的横摆角速度测量值之后从相关的横摆角速度测量值得到的。剩余的横摆角速度测量值尤其可以用gver=grel-gst表示,其中grel表示相关的横摆角速度测量值(低于阈值),gst表示形成斜率的横摆角速度测量值。
24、在一实施例中,确定横摆角速度偏移值可以包括确定剩余横摆角速度测量值的平均值。平均值尤其可被计算为剩余横摆角速度测量值的总和与剩余横摆角速度测量值的数量的商。这尤其可以基于以下公式来执行:
25、ωoffset=sum(gver)/n[3]
26、其中,gver=grel-gst:剩余横摆角速度测量值
27、n:剩余横摆角速度测量值的数量。
28、在一实施例中,该方法包括检查所确定的横摆角速度偏移值的合理性。在一实施例中,合理性检查可以包括检查所确定的(模数或绝对值)横摆角速度偏移值是否在定义的范围内。该范围尤其可以在约(正/负)0.6°/s或更小的范围内,尤其是约(正/负)0.3°/s。例如,典型的(绝对)横摆角速度偏移值可以在0.2至0.3°/s的限定范围内。
29、本发明的另一方面涉及一种用于确定横摆角速度偏移值的控制装置,其被设计成执行根据本说明书中的方面或实施例之一的用于确定横摆角速度偏移值的方法。本发明的另一方面涉及一种用于确定横摆角速度值的控制装置,其被设计成执行根据本说明书中的方面或实施例之一的用于确定横摆角速度值(或横摆角速度)的方法。
30、本发明的另一方面涉及一种用于机动车辆的传感器装置,该传感器装置具有至少一个横摆角速度传感器,特别是陀螺仪,并且具有根据本说明书中的方面或实施例之一的控制装置。
31、控制装置和/或传感器装置尤其可以是驾驶员辅助系统的形式或其一部分,尤其用于辅助机动车辆的驾驶员和/或用于机动车辆的半自主或全自主运行。控制装置和/或传感器装置(或驾驶员辅助系统)尤其可被设计用于定位机动车辆、确定机动车辆的定向和/或估计机动车辆的自身运动。控制装置和/或传感器装置(或驾驶员辅助系统)可被设计用于高速运行,例如用于机动车辆的半自主或全自主驾驶。可替代地或累积地,控制装置和/或传感器装置(或驾驶员辅助系统)也可被设计用于低速运行,例如用于停车和/或操纵。
32、另一方面涉及一种计算机程序产品,其具有存储在计算机可读介质中的程序代码装置,以便当该计算机程序产品在电子控制单元的处理器上运行时,执行根据本说明书中的方面或实施例的方法。特别地,计算机程序产品可以在控制单元的处理器上实现并在那里被处理。
33、另一方面涉及一种具有根据本说明书中的方面或实施例的传感器装置的机动车辆。机动车辆可以是汽车或商用车辆的形式。
34、该方法的实施例的有利形式被视为控制装置、传感器装置、计算机程序产品和机动车辆的实施例的有利形式。为此,控制装置、传感器装置、计算机程序产品和机动车辆具有允许实施该方法及其有利实施例的特定特征。
35、本发明的其他特征可以从权利要求、附图和附图的描述中得到,在上面的描述中引用的特征和特征的组合,以及在下面的附图的描述中引用的和/或单独在附图中示出的特征和特征的组合,不仅可以在分别指出的组合中使用,而且可以在其他组合中使用或单独使用,而不脱离本发明的范围。因此,本发明的这种实施例也应被认为是被包括和公开的,虽然没有在附图中明确示出或解释,但它们从由单独的特征组合描述的实施例中出现并可以从这些实施例中产生。因此不具有最初表述的独立权利要求的所有特征的实施例和特征组合也应被认为是公开的。此外,特征的设计和组合,特别是上述设计的设计和组合,其超出或不同于权利要求的交叉引用中列出的特征组合,也应被认为是公开的。
- 还没有人留言评论。精彩留言会获得点赞!