水下定位系统及方法与流程
本发明涉及一种水下定位系统及方法。
背景技术:
1、在过去,对在水下或水底进行作业的挖掘机、推土机等的重型机械或沉埋箱涵等的结构体的水下位置进行定位。
2、例如,在专利文献1中公开了一种水下音响定位系统,包括:设置在已知坐标处的波发射器、设置在挖掘机上的波接收器、与波发射器连接的信号生成部、d/a转换器、放大器及gnss天线、控制装置,该控制装置基于从波发射器向波接收器每隔规定间隔发出的声波的传播时间来推定挖掘机的坐标。
3、现有技术文献
4、专利文献
5、专利文献1:jp特开2018-204970号公报
技术实现思路
1、发明要解决的课题
2、然而,在专利文献1所述的系统中,如图14所示的那样,从波发射器发出并到达波接收器的声波除了包括从波发射器朝向波接收器直行的声波(直达波)之外,还包括由水面、水底或结构体反射的声波(反射波)、由水底、结构体衍射的声波(衍射波)。
3、因此,如图15所示的那样,即使分别计算出波发射器与波接收器间传播路径的脉冲响应,将其峰值到达时间作为直达波到达时间来推定波发射器的坐标,由于直达波、反射波及衍射波对波接收器接收到的声波干扰,仅通过分别计算各脉冲响应的峰值到达时间,不能正确地计算直达波的到达时间,有可能在波接收器的位置推定结果中产生大的误差或产生缺失测量。
4、于是,为了正确地进行水下定位,产生了需要解决的技术课题,本发明的目的在于解决该课题。
5、用于解决课题的技术方案
6、为了达到上述目的,本发明的水下定位系统涉及下述的水下定位系统,其中,在已知坐标处设置一台以上波发射器及一台以上波接收器中的至少一台以上,对其它的上述波发射器或波接收器所设置的未知坐标的未知点进行定位,其特征在于,该水下定位系统包括:数据库,其中,在通过划分水下定位范围而设定的多个区域内设定了上述未知点的情况下,针对每个上述区域预先存储从上述波发射器发出的声波到达上述波接收器的时间窗;以及坐标推定部,其针对每个上述区域计算时间窗适用脉冲响应,该时间窗适用脉冲响应为上述时间窗与从上述波发射器到上述波接收器的声波传播路径的脉冲响应的内积,并推定上述未知点位于上述时间窗适用脉冲响应的能量最大的上述区域。
7、按照该方案,通过采取脉冲响应与时间窗的内积,排除了脉冲响应中包含的不想要的声波,按每个区域来比较时间窗适用脉冲响应的总能量的大小,能够高精度地推定设置在未知点的波发射器或波接收器所处的区域。
8、另外,为了实现上述目,本发明的水下定位方法涉及下述的水下定位方法,其中,在已知坐标处设置一台以上波发射器或一台以上波接收器中的至少一台以上,对其它的上述波发射器或波接收器所设置的未知坐标的未知点进行定位,其特征在于该方法包括:在通过划分水下定位范围而设定的多个区域内设定了上述未知点的情况下,将从上述波发射器发出的声波到达上述波接收器的时间窗按每个上述区域预先存储在数据库中的步骤;波接收器分别接收从波发射器发出声波的步骤;以及坐标推定部针对每个上述区域计算时间窗适用脉冲响应,并推定上述未知点位于上述时间窗适用脉冲响应的能量最大的区域的步骤,该时间窗适用脉冲响应为上述时间窗与从上述波发射器到上述波接收器的声波传播路径的脉冲响应的内积。
9、按照该方案,通过采取脉冲响应与时间窗的内积,排除了脉冲响应中包含的不想要的声波,按每个区域来比较时间窗适用脉冲响应的总能量的大小,能够高精度地推定设置在未知点的波发射器或波接收器所处的区域。
10、发明的效果
11、按照本发明,能够准确地定位设置在未知点处的波发射器或波接收器的水下位置。
技术特征:
1.一种水下定位系统,其中在已知坐标处设置一台以上波发射器及一台以上波接收器中的至少一台以上,并对其它的上述波发射器或波接收器所设置的未知坐标的未知点进行定位,其特征在于,该水下定位系统包括:
2.根据权利要求1所述的水下定位系统,其特征在于,还包括坐标指定部,该坐标指定部根据上述时间窗适用脉冲响应的峰值到达时间,指定所推定的上述区域内的未知点的坐标。
3.根据权利要求1或2所述的水下定位系统,其特征在于,上述时间窗是包含下述时间的时间范围:在上述区域内上述波发射器位于最靠近上述波接收器的情况下的直达波到达时间;以及在上述区域内上述波发射器位于最远离上述波接收器的情况下的直达波到达时间。
4.根据权利要求1至3中任一项所述的水下定位系统,其特征在于,上述声波是脉冲信号或调制信号。
5.根据权利要求1至4中任一项所述的水下定位系统,其特征在于,上述区域具有多个第一区域和划分上述第一区域而设定的多个第二区域;
6.一种水下定位方法,其中,在已知坐标处设置一台以上波发射器及一台以上波接收器中的至少一台以上,并对其它的上述波发射器或波接收器所设置的未知坐标的未知点进行定位,其特征在于,该方法包括:
技术总结
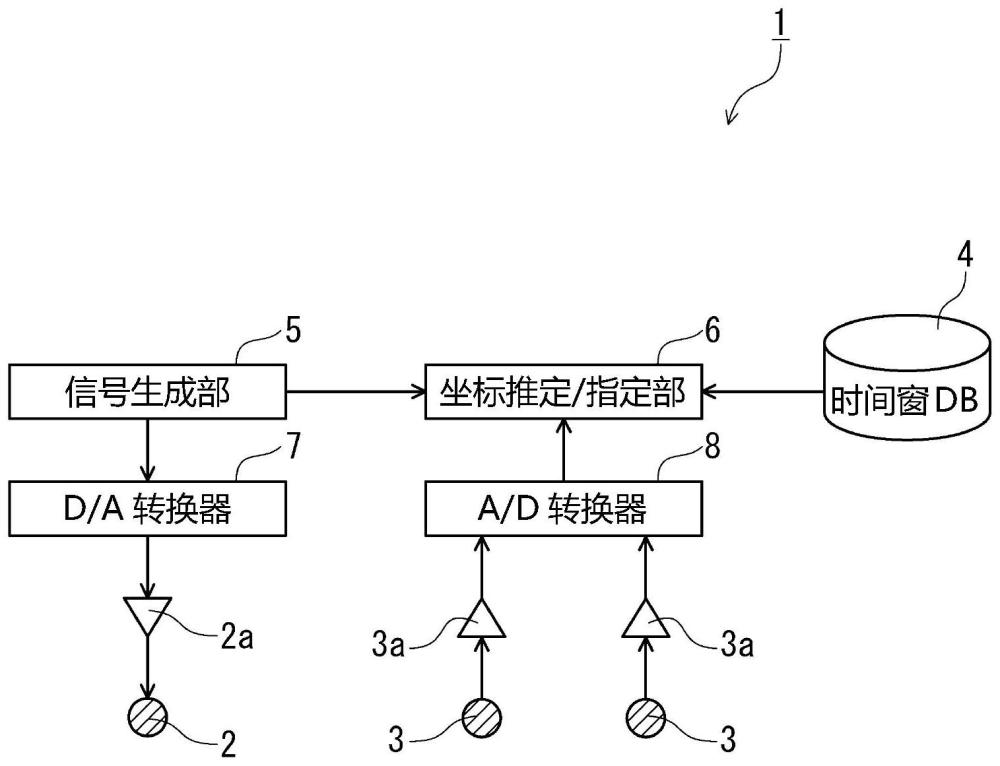
[问题]本发明的目的在于提供一种能够进行精确的水下定位的水下定位系统和方法。[解决方案]一种水下定位系统(1),其中在已知坐标处设置一台以上波发射器(2)或一台以上波接收器(3)中的至少一台以上,并对其它的波发射器(2)或波接收器(3)所设置的未知坐标的未知点进行定位,该水下定位系统(1)包括:时间窗DB(4),其中,在通过划分水下定位范围而设定的多个区域(R)内设定了未知点的情况下,针对每个区域(R)预先存储从波发射器(2)发射的声波到达波接收器(3)的时间窗;以及坐标推定/指定部(6),其针对每个区域(R)计算时间窗适用脉冲响应,该时间窗适用脉冲响应为时间窗与从波发射器(2)到波接收器(3)的声波传播路径的脉冲响应的内积,并推定未知点位于时间窗适用脉冲响应的能量最大的区域(R)。
技术研发人员:吉原到,海老原格,水谷孝一
受保护的技术使用者:AOMI建设株式会社
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!