一种单历元双差整周模糊度快速解算确认方法
1.本发明涉及双差整周模糊度解算技术领域,尤其涉及一种单历元双差整周模糊度解算确认。
背景技术:
2.在高精度卫星定位领域,一般采用gnss载波相位测量法。载波相位信号是周期性的正弦信号,而gnss载波相位测量只能测量其不足一个波长的部分,因而存在整周不确定性的问题,即整周模糊度(也称整周未知数)的问题。整周模糊度的快速确定是高精度卫星实时动态定位的关键之一。在进行整周模糊度确定时,在确定出主频率信号对应的最优解时,目前的方法通常要使用ratio检验对该最优解进行可靠性检验,检验通过之后,再利用该最优解确定所有卫星对双差整周模糊度。使用ratio检验相对复杂,某种程度上减慢单历元双差整周模糊度的快速确定。另一方面,ratio检验的临界值通常设置为3.0,这是一个经验值,有一些文献表明设置为1.8~3.0均可,没有一个确定的数值,这对于可靠性要求强的实际应用来说,存在一定的“纳伪”或“弃真”可能情况。
3.本文对背景技术的描述只是为了方便对本发明的理解,不表明这些技术为本领域的技术人员所知,不应理所当然地被认为是现有技术。
技术实现要素:
4.本发明鉴于现有技术的以上情况作出,用以解决现有技术中存在的一项或更多项的问题,至少提供一种有益的选择。
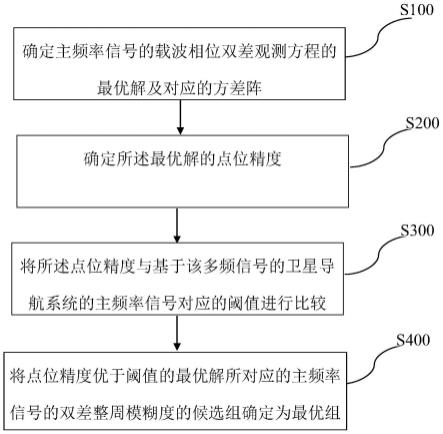
5.根据本发明的一个方面,提供了一种单历元双差整周模糊度快速解算确认方法。该方法用于多频信号的卫星导航系统,所述方法包括:确定主频率信号的载波相位双差观测方程的最优解及对应的方差阵;确定所述最优解的点位精度;将所述点位精度与基于该多频信号的卫星导航系统的主频率信号对应的阈值进行比较;将点位精度优于所述阈值的最优解对应主频率信号的双差整周模糊度的候选组确定为最优组。
6.根据本发明的一些实施方式,无需使用传统的ratio检验的方法,可以提高单历元双差整周模糊度的确定效率,至少可以作为一种有益的选择。
附图说明
7.结合附图可以更好地理解本发明,附图是示意性的,不是对本发明的保护范围的限制。
8.图1示出了依据本发明的一种实施方式的单历元双差整周模糊度快速解算确认方法的示意性流程图。
9.图2示出了依据本发明的一种实施方式的确定主频率信号的载波相位双差观测方程的最优解及对应的方差阵的方法的示意性流程图。
具体实施方式
10.图1示出了依据本发明的一种实施方式的单历元双差整周模糊度快速解算确认方法的示意性流程图。如图1所示,依据本发明的一种实施方式的单历元双差整周模糊度快速解算确认方法,首先在步骤s100确定主频率信号的载波相位双差观测方程的最优解及对应的方差阵。然后,在步骤s200,确定所述最优解的点位精度。接着,在步骤s300,将所述点位精度与基于该多频信号的卫星导航系统的主频率信号对应的阈值进行比较;最后,在步骤s400,将点位精度优于所述阈值的最优解所对应的主频率信号的双差整周模糊度的候选组确定为最优组。该方法可以使用卫星定位的流动站(以下也称流动站或监测站,可以是gnss监测站)和与监测站相通信的处理器完成。该监测站可以固定安装在例如高层建筑的顶部的位置。所述监测站主要用于卫星导航信号的数据采集,所述方法涉及的s100~s400步骤均由处理器来实现,监测站与处理器可以单独,也可以集成于一体。在实现该步骤s100~s400时,可以与存储器相配合。
11.确定主频率信号的载波相位双差观测方程的最优解及对应的方差阵的步骤s100可以采用本领域技术人员现在知道的或以后知悉的其它方法来实现。例如,采用最小二乘参数估计间接平差法确定主频率信号的载波相位双差观测方程的最优解及对应的方差阵。
12.图2示出了依据本发明的一种实施方式的确定主频率信号的载波相位双差观测方程的最优解及对应的方差阵的方法的示意性流程图。如图2所示,依据本发明的一种实施方式的确定主频率信号的载波相位双差观测方程的最优解及对应的方差阵的方法首先在步骤s110确定主频率信号和辅频率信号。主频率信号主要用于定位,辅频率信号主要用于交叉约束主频率信号的双差整周模糊度快速解算。根据一种实施方式,可以将多频率信号的卫星导航系统的第一频率信号确定为主频率信号,而将主频率信号之外的频率信号单独或线性组合确定为辅频率信号。也可以是将单一系统(例如bds系统的b1i、b1c、b2a、b2b、b3i或gps系统的l1、l2、l5)的多个频率信号进行宽巷组合或窄巷组合或超宽巷组合等线性组合形成一个新的组合频率信号确定为主频率信号,而将主频率信号之外的频率信号单独或线性组合确定为辅频率信号。根据一种实施方式,将载波相位观测量精度高的一个原始频率信号或经多个原始频率信号进行线性组合后形成一个新的组合频率信号确定为主频率信号。
13.然后在步骤s120,构建主频率信号的载波相位双差观测方程和辅频率信号的载波相位双差观测方程。
14.根据一种实施方式,如下地建立主频率信号的载波相位双差观测方程和辅频率信号的载波相位双差观测方程:
[0015][0016]
其中,λ为频率信号的波长,包括主频率信号和辅频率信号的波长,当λ为主频率信号的波长时,建立的为主频率信号的载波相位双差观测方程,当λ为辅频率信号的波长时,
建立的为辅频率信号的载波相位双差观测方程,
[0017]
其中,下标b表示基准站,下标r表示流动站,上标i表示卫星高度角最大的参考卫星,上标j表示除所述参考卫星之外的卫星,j=1,2,
…
,i-1,i+1,
…
,k,表示载波相位双差观测值,表示站星间距离观测值与卫地距差之差,和表示卫地距方向余弦系数,和为流动站r的三维坐标改正数,表示双差整周模糊度,k是正整数,指本历元观测的卫星的总数。
[0018]
接着,在步骤s130,利用辅频率信号的载波相位双差观测方程,确定主频率信号的双差整周模糊度的候选组。
[0019]
根据一种实施方式,如下地确定主频率信号的双差整周模糊度的候选组:
[0020]
首先,如下地计算辅频率信号的双差整周模糊度的初值:
[0021][0022]
其中,下标b表示基准站,下标r表示流动站,上标i表示卫星高度角最大的参考卫星,上标j表示除所述参考卫星之外的卫星,j=1,2,
…
,i-1,i+1,
…
,k,表示辅频率信号fa的双差整周模糊度的初值,表示辅频率信号fa的站星间距离观测值与卫地距差之差,表示辅频率信号fa的双差载波相位观测值,为辅频率信号fa的波长。
[0023]
其次,利用该初值,确定辅频率信号的双差整周模糊度的候选值:
[0024]
针对卫星对i和j,
[0025][0026]
其中,i为参考卫星,j为除参考卫星之外的卫星,j=1,2,
…
,i-1,i+1,
…
,k,e
length
指卫星对i和j的误差带的带长,根据一种实施方式,采用l倍伪距差分观测值的中误差估值构建。具体地,可以如下地确定:
[0027][0028]
其中,为伪距差分观测值的中误差估值,为辅频率信号的波长,l=2~5,int(
·
)表示取整运算。
[0029]
采用伪距差分观测值的中误差估值构建,可以增加卫星对i和j的误差带的准确性,其中所述伪距差分观测值可以是单差观测值,也可以是双差观测值。
[0030]
在上述公式中,为辅频率信号fa的双差整周模糊度的候选值,为w个具有整数特性的双差整周模糊度的候选组。
[0031]
再次,利用如下地关系式,将的确定为主频率信号fm的双差整周模糊度的候选值:
[0032][0033]
其中:
[0034]
其中,u为误差带,为主频率信号fm经站星间双差后的残余误差及测量噪声,为辅频率信号fa经站星间双差后的残余误差及测量噪声,为主频率信号的波长,为辅频率信号的波长,为辅频率信号fa的双差整周模糊度的候选值,e
wide
指卫星对i和j的误差带的带宽。
[0035]
根据一种实施方式,针对多频率信号,优选地,确定主频率信号和辅频率信号,使所述辅频率信号fa对应的波长与所述主频率信号fm对应的波长之比值尽量小,c为光速。换言之,针对多频率信号,确定主频率信号和辅频率信号,使所述主频率信号对应的频率fm与所述辅频率信号对应的频率fa之比值尽量小。能够使得在确定的w个具有整数特性的双差整周模糊度的候选组中,基于误差带u的交叉搜索(或约束)下,可以获得更少数量的v个具有整数特性的双差整周模糊度的候选组
[0036]
根据一种实施方式,可采用基准站b与流动站r之间形成的基线长度l
br
构建误差带的带宽。根据一种实施方式如下地确定:
[0037][0038]
利用这种实施方式,由于使用了基线长度l
br
,可以更好地确定误差带的带宽,增加了卫星对i和j的误差带构建的准确性。
[0039]
为主频率信号fm的双差整周模糊度的候选值,
[0040]
为v个具有整数特性的双差整周模糊度的候选组。
[0041]
最后,单历元数据中所有的卫星对的主频率信号的双差整周模糊度的候选值如下地表示:
[0042][0043]
对所述候选值进行组排列组合,获得单历元数据中所有的卫星对的主频率信号的双差整周模糊度的候选组,t表示候选组总数。
[0044]
然后,在步骤s140,根据所述双差整周模糊度的候选组,确定主频率信号的载波相位双差观测方程的最优解及对应的方差阵。根据一种实施方式,如下地确定主频率信号的双差整周模糊度的最优解及对应的方差阵:
[0045]
首先,将主频率信号的双差整周模糊度的t组候选组依次代入主频率的载波相位双差观测方程中,根据最小二乘参数估计间接平差法,对应的主频率信号的载波相位双差观测方程的误差方程为:
[0046]
[0047]
写成矩阵形式为:
[0048][0049]
其中,其中,其中,
[0050]
下标b表示基准站,下标r表示流动站,上标i表示卫星高度角最大的参考卫星,上标j表示所述参考卫星外的卫星,j=1,2,
…
,i-1,i+1,
…
,k,为载波相位双差观测值,为主频率信号的波长,为主频率信号的双差整周模糊度的候选组;为站星间距离观测值与卫地距差之差,和为卫地距方向余弦系数,和为流动站r的三维坐标改正数,为载波相位双差观测值的残差,为主频率信号的载波相位双差观测方程的常数项;
[0051]
其次,根据最小二乘参数估计间接平差法,如下地计算主频率信号的载波相位双差观测方程的验后单位权方差估值:
[0052][0053]
其中:k为单历元数据中的观测卫星总数,k≥5,p为单历元数据中的载波相位双差观测值的权矩阵。
[0054]
由t组候选组,可以计算获得t个验后单位权方差估值,用集合表示为
[0055]
接着,对集合中的元素进行从小到大排序,获得最小的验后单位权方差估值
[0056][0057]
则m对应的候选组确定为最优组,即
[0058]
根据所述最优组,由最小二乘参数估计间接平差法可以解算获得流动站r的最优
解:
[0059][0060]
所述最优解对应的方差阵为:
[0061][0062]
其中,为流动站r的单历元卫星定位位置参数估值及其方差阵;为流动站r的单历元卫星定位位置参数改正数及其相应的方差阵;p为单历元数据中的载波相位双差观测值的权矩阵;为流动站r的单历元卫星定位的待估参数初始值,为流动站r的单历元卫星定位x方向中误差估值,为流动站r的单历元卫星定位y方向中误差估值,为流动站r的单历元卫星定位z方向中误差估值,为流动站r的单历元卫星定位x方向与y方向之间的协方差估值,为流动站r的单历元卫星定位x方向与z方向之间的协方差估值,为流动站r的单历元卫星定位y方向与z方向之间的协方差估值。
[0063]
根据一种实施方式,可以由单历元数据中的粗码观测值的伪距差分定位计算获得。根据另一种实施方式,针对例如高层建筑倾斜监测实际应用,由高层建筑顶部的监测点位置的参考已知值提供(即监测站固定安装的位置,可以由高精度卫星定位控制测量网技术获得):
[0064][0065]
其中,xm=[b
m l
m hm]
t
为高层建筑顶部的监测点位置的参考已知值(即监测站固定安装的位置)。
[0066]
若采用流动站r的站心坐标系中的表达形式衡量流动站的定位精度,针对站心坐标系流动站的单历元卫星定位位置参数估值的方差阵用表示,则由方差-协方差传播律可得:
[0067][0068]
式中,其中:b0、l0分别为流动站r的位置的参考已知值对应的大地纬度和大地经度;为流动站的单历元卫星定位北向中误差估值,为流动站的单历元卫星定位东向中误差估值,为流动站的单历元卫星定位高程向中误差估值,为流动站的单历元卫星定位北向与东向之间的协方差估值,
为流动站的单历元卫星定位北向与高程向之间的协方差估值,为流动站的单历元卫星定位东向与高程向之间的协方差估值。
[0069]
回到图1,在步骤s200确定所述最优解的点位精度。
[0070]
根据一种实施方式,如下地确定所述最优解的点位精度:
[0071]
由所述方差阵该点位精度确定为:
[0072][0073]
其中,为流动站r的单历元卫星定位的点位精度。
[0074]
根据另一种实施方式,如下地确定所述最优解的点位精度:
[0075]
由所述方差阵则根据获得获得
[0076]
其中,b0、l0分别为流动站r的位置的大地纬度和大地经度。
[0077]
然后,该点位精度确定为:
[0078][0079]
其中,为流动站r的点位精度,为流动站r的单历元卫星定位北向中误差估值,为流动站r的单历元卫星定位东向中误差估值,为流动站r的单历元卫星定位高程向中误差估值,为流动站r的单历元卫星定位北向与东向之间的协方差估值,为流动站r的单历元卫星定位北向与高程向之间的协方差估值,为流动站r的单历元卫星定位东向与高程向之间的协方差估值。
[0080]
然后,在步骤s300,将所述点位精度与基于该多频信号的卫星导航系统的主频率信号对应的阈值进行比较。
[0081]
根据一种实施方式,如下地根据基于多频信号的卫星导航系统的主频率信号对应的波长或频率确定该阈值:
[0082]
[0083]
其中,为所述阈值,为所述基于多频信号的卫星导航系统的主频率信号对应的波长,fm为所述基于多频信号的卫星导航系统的主频率信号对应的频率,c为光速。
[0084]
另外,根据实验结果,针对当前的基于多频信号的卫星导航系统的第一频率(gps系统的l1频率1575.420mhz、bds系统的b1i频率1561.098mhz、glonass系统的l1频率1598.0625~1609.3125mhz以及galileo系统的e1频率1575.420mhz)而言,该阈值可以在0.1613~0.1663米的区间取值。
[0085]
根据一种实施方式,针对基于多频信号的卫星导航系统的主频率信号为窄巷组合观测值频率,该阈值设置为0.092米。根据推算结果,将该值设置为阈值,能够很好地适应当前的基于多频信号的卫星导航系统的线性组合观测值频率,并且在可靠性检验和错检率之间取得很好的平衡。
[0086]
在该步骤s300中,将在步骤s200获得的点位精度与该基于多频信号卫星导航系统的主频率信号对应的阈值进行比较,如果比较的结果是该点位精度大于该阈值,即精度不够,则舍弃该最优解,重新回到步骤s100进行下一个单历元数据的双差整周模糊度快速解算确认。
[0087]
最后,在步骤s400,当比较的结果是该点位精度小于该阈值时,将所述点位精度优于所述阈值的最优解所对应的主频率信号的双差整周模糊度的候选组确定为最优组。
[0088]
根据一种实施方式,所述方法还包括将所述的最优解代入主频率信号的载波相位双差观测方程,确定主频率信号的双差整周模糊度的取整组;以及确认最优组和取整组的一致性,确定单历元双差整周模糊度。
[0089]
根据一种实施方式,如下地确定主频率信号的双差整周模糊度的取整组:
[0090]
首先,将所确定的主频率信号的双差整周模糊度的最优组代入主频率信号的载波相位双差观测方程,采用最小二乘参数估计间接平差法,计算获得流动站r的三维坐标改正数并将三维坐标改正数代回主频率信号的载波相位双差观测方程,如下地解算主频率信号的双差整周模糊度的实数解:
[0091][0092]
然后,将所述实数解按照“四舍六入、遇五奇进偶不进”原则取整运算,如下地获得
主频率信号的双差整周模糊度的取整组:
[0093][0094]
其中,为主频率信号的双差整周模糊度的取整组,int(
·
)为取整算子。
[0095]
根据一种实施方式,如下地确认所述最优组和所述取整组的一致性。
[0096]
针对单历元数据中的卫星对i和j的双差整周模糊度,确认所述最优组中的与所述取整组中是否相等,j=1,2,
…
,i-1,i+1,
…
,k,其中k≥5;
[0097]
如果与是相等的,则判定为单历元数据中的卫星对i和j的双差整周模糊度快速解算通过确认,表示卫星对i和j的双差整周模糊度快速解算成功;
[0098]
如果与是不相等的,则判定为单历元数据中的卫星对i和j的双差整周模糊度快速解算未通过确认,表示卫星对i和j的双差整周模糊度快速解算失败;
[0099]
根据一种实施方式,如下地获得通过确认的单历元数据中的卫星对的双差整周模糊度,即:j1=1,2,
…
,i-1,i+1,
…
,s,s为通过确认的单历元数据中的卫星对的个数,其中s≤k。
[0100]
根据本发明的一种实施方式,在所述方法中,可以适用于gnss接收机数据采样率不低于1hz的实时定位。
[0101]
本发明的实施方式由于考虑了卫星导航系统具有多频信号特征,优选主、辅频率载波相位观测值,无需进行传统的复杂的ratio检验,只需采用简单地一致性确认即能快速确定整周模糊度,为高频数据单历元双差整周模糊度快速确定提供一种可靠性强、解算效率快且简单有效的快速解算确认方法。
[0102]
本发明的上述详细的描述仅仅给本领域技术人员更进一步的相信内容,以用于实施本发明的优选方面,并且不会对本发明的范围进行限制。仅有权利要求用于确定本发明的保护范围。因此,在前述详细描述中的特征和步骤的结合不是必要的用于在最宽广的范围内实施本发明,并且可替换地仅对本发明的特别详细描述的代表性实施例给出教导。此外,为了获得本发明的附加有用实施例,在说明书中给出教导的各种不同的特征可通过多种方式结合,然而这些方式没有特别地被例举出来。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1