一种基于毫米波雷达的智能马桶人体检测系统
本发明涉及毫米波雷达系统,尤其涉及一种基于毫米波雷达的智能马桶人体检测系统。
背景技术:
1、自动化领域的快速增长促进了更多人机交互的高效与便捷。而对于人体移动的雷达感知则进一步增加了人机交互体验。大多数基于毫米波的调频连续波雷达的人体检测研究采用的方法是从未加工的数据中进行距离和速度的估计,例如时频谱图,微多普勒频谱以及距离多普勒成像。此外,使用多重天线进行角度估计也包含丰富的人体移动信息,尤其是区分人体横向和纵向移动。
2、在人机交互领域,基于传感器的动态与静态的目标识别是一个重要部分。摆脱物理控制接口(如按钮和触屏的手势识别)是一个热点研究方向。有很多基于各种传感器的手势识别研究,例如基于影像式的使用opencv的解决方案,以及可穿戴式装置进行轨迹追踪的解决方案。无线人体检测作为一项非接触技术,无线信号可以穿透塑料、墙或衣服等材料。无线人体检测可以在晚上工作且性能不受可见光的影响。比起基于可见光的解决方案,基于无线的解决方案在隐私保护方面具有较大优势。而毫米波雷达是一项具有较好前景的无线技术。毫米波雷达拥有低功耗的系统芯片和传感器,可同时进行信号的特征提取与分类。目前在智能家居领域(如智能马桶)涉及到的毫米波雷达对于人体位置与速度检测与判定的研究工作较少,因此,设计一套识别率较高,抗干扰能力较强,可拓展且功能较全面的毫米波雷达人体检测系统对毫米波雷达的商业化应用具有重要意义。
技术实现思路
1、本发明的目的在于解决现有毫米波雷达人体检测在智能家居领域应用较少,缺少更加成熟、全面的系统进行更加精准的人体检测等问题,以智能马桶的实际应用为例,提出一种基于毫米波雷达的智能马桶人体检测系统,以识别人的正面进入、侧面进入、经过与退出等多种状态。
2、一种基于毫米波雷达的智能马桶人体检测系统,包括:毫米波雷达处理模块和智能马桶;
3、所述毫米波雷达处理模块安装在智能马桶盖子后方,该模块包括毫米波射频收发单元、微控制单元、发射天线和接收天线,其中,毫米波射频收发单元分别与微控制单元、发射天线和接收天线连接;
4、所述毫米波射频收发单元根据雷达波形参数产生相应的毫米波雷达信号,并接收毫米波雷达信号被测试人员反射回来的回波信号,再将回波信号传输给微控制单元;
5、所述微控制单元为可烧录和运行人体检测程序的单片机,用于处理回波信号得到人体检测判断结果,并传输给智能马桶;
6、所述发射天线用于发射毫米波射频收发单元产生的毫米波雷达信号;
7、所述接收天线用于接收空间中反射回来的毫米波雷达信号,并将其传输给毫米波射频收发单元;
8、所述智能马桶根据毫米波雷达处理模块返回的人体检测结果和相关通信协议控制开盖或者关盖。
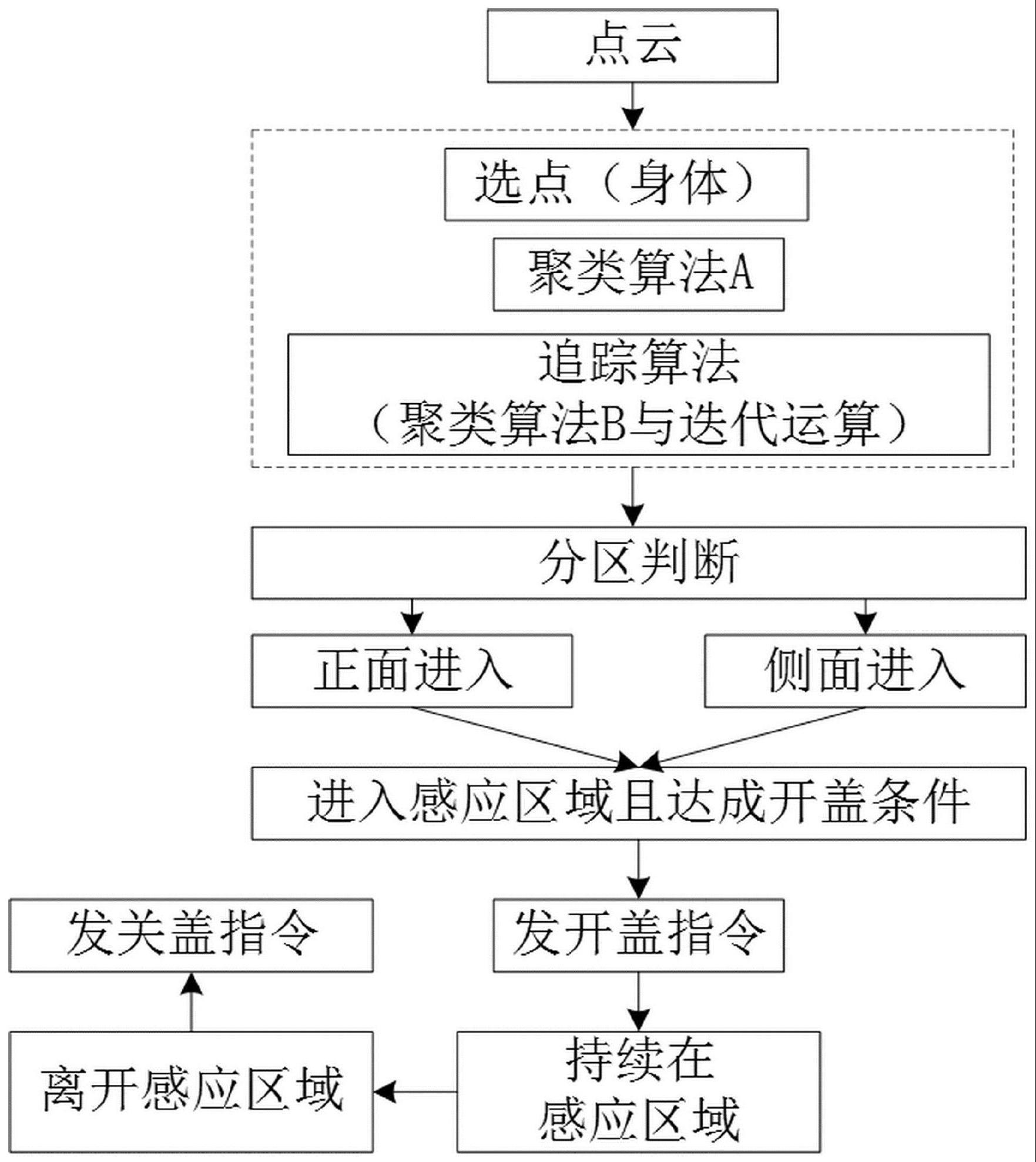
9、优选地,系统的人体检测算法在微控制单元处理回波信号的过程中完成,人体检测系统及智能马桶的工作包括以下步骤:
10、s1、微控制单元根据回波信号得到测试人员每一帧多个点的数据信息;
11、s2、运行聚类算法a,得到测试人员的位置信息和能量信息;
12、s3、运行追踪算法,得到测试人员的预测位置与x轴、y轴方向的运动速度;
13、s4、结合步骤s2和步骤s3中计算得到的数据信息运行人体检测算法,得到人体检测判断结果;
14、s5、智能马桶根据微控制单元返回的处理结果和通信协议决定是否开盖。
15、优选地,所述步骤s1中的数据信息包括:
16、当前帧的帧编号framenow;
17、当前帧采集的点云到雷达中心距离r;
18、当前帧采集的点云三维空间直角坐标(x,y,z);
19、当前帧采集的点云运动速度vel;
20、当前帧采集的点云功率pow;
21、经毫米波雷达处理后当前帧采集的有效点云数量targetnum。
22、优选地,所述步骤s2中的聚类算法a,具体步骤包括:
23、s2.1、将毫米波雷达采集并经过底层信号处理得到的每帧点云数据按照到雷达中心距离r由小到大排序,排序算法采用冒泡排序法,仅对点云数据的序号进行排序,不改变点云空间;
24、s2.2、按照到雷达中心距离r由小到大的升序开始遍历排序后的每帧所有点云数据:
25、s2.2.1、若当前点未分配,则为当前点新分配一个类,并将当前点标记为已分配,随后将其第一预设半径邻域内的点一起划分到当前点所在类中,并更新该类中所有点云数据的三维空间坐标加权平均值以及加权能量值,同时将该类中所有点标记为已分配;
26、若当前点已分配,则跳过当前循环继续遍历下一个点;
27、s2.2.2、重复过程s2.2.1直至当前帧所有点均已分配;
28、s2.3、当遍历完当前帧所有点云数据后,如果步骤s2.2得到的类的数量大于1个,则首先过滤掉点数少于2个的类,然后选取加权平均能量较大的类,以该类的坐标加权平均值以及加权能量值作为算法返回的聚类结果。
29、优选地,所述步骤s3所述的追踪算法,具体内容如下:
30、s3.1、对毫米波雷达采集并经过底层信号处理得到的每帧点云数据运行聚类算法b,算法步骤如下:
31、s3.1.1、对毫米波雷达采集处理得到的每帧点云数据通过遍历搜索找到最大功率点,并记录其功率值maxpow和序号索引maxpowidx;
32、s3.1.2、选取最大功率点第二预设半径邻域内功率大于0.4*maxpow的点云数据,随后将这些点与最大功率点一起划分到一个类中,并更新该类中所有点云数据的坐标加权平均值以及加权能量值作为算法返回的聚类结果;
33、s3.2、根据聚类算法b得到的每帧点云聚类结果,对测试人员与大地平行的平面内运动轨迹进行追踪与预测,相应迭代计算过程如下:
34、s3.2.1、初始化测试人员追踪位置(t_x,t_y)以及追踪速度(t_vx,t_vy):
35、t_x=0m,t_y=0m,t_vx=0m/s,t_vy=0m/s
36、s3.2.2、根据上一帧的测试人员追踪位置(t_x,t_y)以及追踪速度(t_vx,t_vy),帧间隔时间frame_t,当前帧由聚类算法b得到的聚类位置(xcenter,ycenter),计算测试人员当前帧的预测位置(x_predict,y_predict)和预测偏差(delta_x,delta_y):
37、x_predict=t_x+t_vx*frame_t;
38、y_predict=t_y+t_vx*frame_t;
39、delta_x=xcenter-x_predict;
40、delta_y=ycenter-y_predict;
41、s3.2.3、更新当前帧的追踪位置(t_x,t_y)以及追踪速度(t_vx,t_vy):
42、t_x=x_predict+λ*delta_x;
43、t_y=y_predict+λ*delta_y;
44、t_vx=t_vx+ω/frame_t*delta_x;
45、t_vy=t_vx+ω/frame_t*delta_y;
46、其中λ,ω取值在0-1,可根据实际需要进行调整,所述聚类算法b在1m以内的近距离的效果优于聚类算法a,用于配合追踪算法的速度估计。
47、优选地,所述步骤s4中的人体检测算法,将人体状态划分如下:
48、nothing:毫米波雷达未检测到任何目标;
49、notarget:毫米波雷达接收到信号,但未发现有目标靠近智能马桶;
50、body_in:毫米波雷达发现有目标靠近智能马桶,但目标尚未进入智能马桶感应区域不满足开盖条件;
51、body_pass:毫米波雷达发现有目标靠近智能马桶,但目标进入智能马桶感应区域后未满足开盖条件便离开感应区域;
52、body_stay:目标进入智能马桶感应区域并满足开盖条件,且在当前感应区域停留;
53、body_away:目标离开智能马桶感应区域并满足关盖条件;
54、各个人体状态的转换关系如下:
55、nothing:维持或转换到notarget,body_in,body_stay三种状态之一;
56、notarget:维持或转换到nothing,body_in,body_stay三种状态之一;
57、body_in:维持或转换到nothing,notarget,body_pass,body_stay四种状态之一;
58、body_pass:无法维持,一帧之后强制转换到body_away状态;
59、body_stay:维持或转换到body_away,notarget,nothing三种状态之一;
60、body_away:维持或转换到nothing,notarget,body_stay三种状态之一;
61、nothing,notarget,body_in三种状态均可不经其他状态进入body_stay状态。
62、优选地,所述进入body_stay状态的条件分为两类情况:
63、情况一,人体从正面进入智能马桶感应区域,此时快速开盖;情况二,人体从侧面进入智能马桶感应区域,当人体在y轴方向的移动速度小于速度阈值且在感应区域停留帧数达到帧数阈值时,此时慢速开盖;
64、其中,正面进入或侧面进入智能马桶感应区域的判定依据如下:
65、a、感应区域为智能马桶正前方一片指定大小的矩形区域,该矩形区域与智能马桶宽度相同,长度取值范围0.4m-0.5m;
66、b、测试人员从感应区域左右两侧或智能马桶后方绕过来进入感应区域时,均认为是侧面进入,其他情况下认为是正面进入。
67、优选地,所述步骤s5具体包括:
68、s5.1、智能马桶主板接收根据微控制单元返回的处理结果,当处理结果为body_stay时,控制智能马桶开盖,其他情况下不开盖;
69、s5.2、若当前人处于body_stay状态,且马桶盖处于开启状态,则当人离开感应区域处于body_away,notarget,nothing三种状态之一时,智能马桶关盖,其他情况下不关盖。
70、本发明具有以下优点:
71、1、本发明提供的一种基于毫米波雷达的智能马桶人体检测系统,能识别人的正面进入、侧面进入、经过与退出等多种状态。
72、2、本发明对于人体各种基本状态的识别准确率可达95%以上,且系统相关装置便于集成和安装,整体功耗较小。
73、3、本发明作为一种基于毫米波雷达的无线人体检测系统,可以在晚上工作且性能不受可见光的影响,相比于基于可见光的解决方案,本发明的技术方案在隐私保护方面具有较大优势。
- 还没有人留言评论。精彩留言会获得点赞!