一种基于联邦学习惯性导航融合定位方法
本发明涉及室内定位。
背景技术:
1、惯性导航是室内定位的关键部分,但广泛应用的商业级惯性导航器件偏差大,采用传统的航位推迹方法在短时间内会有较大定位误差,无法满足室内定位的要求。有使用深度学习的方法提高惯性导航定位精度,公开号cn107655472b使用深度学习的高精度惯性导航设备误差补偿方法,从误差层面一定程度上提高了导航定位的精度。公开号cn108168548b发明了一种通过机器学习算法与模型辅助的行人惯性导航系统,通过对传感器信息进行训练,实现对行人导航系统进行实时故障检测,一定程度上减少故障率的发生。公开号cn112595313a将惯性导航器件获取的位置和速度输入机器学习模型,从而建立辅助导航信息,避免长时间定位误差的发散,提高定位精度。但上述方法会涉及到惯性导航数据的安全隐私问题,且集中收集数据难度大,训练效率低。
技术实现思路
1、本发明首次提出基于联邦学习的惯性导航定位框架,创新性提出分段融合定位方法,解决单锚点在大场景中无法全面覆盖的问题。
2、本发明针对现有集中式深度学习惯导定位方法存在的安全隐私、数据采集难度大、训练效率低等问题,发明了基于联邦学习的惯性导航方法可解决上述问题,同时采用边缘测距端分段融合定位的方法,使用低成本可极大提高系统的定位精度。
3、本发明技术方案如下:
4、一种基于联邦学习惯性导航融合定位方法,其特征在于,使用联邦边缘学习方法预测速度,获取定位信息,然后使用单锚点测距进行分段融合的方法。
5、一种基于联邦学习惯性导航融合定位方法,其特征在于,包括:
6、步骤1、惯导数据输入
7、行人手机获取惯导原始数据,惯导数据包括陀螺仪和加速度计的x、y、z三轴数据;
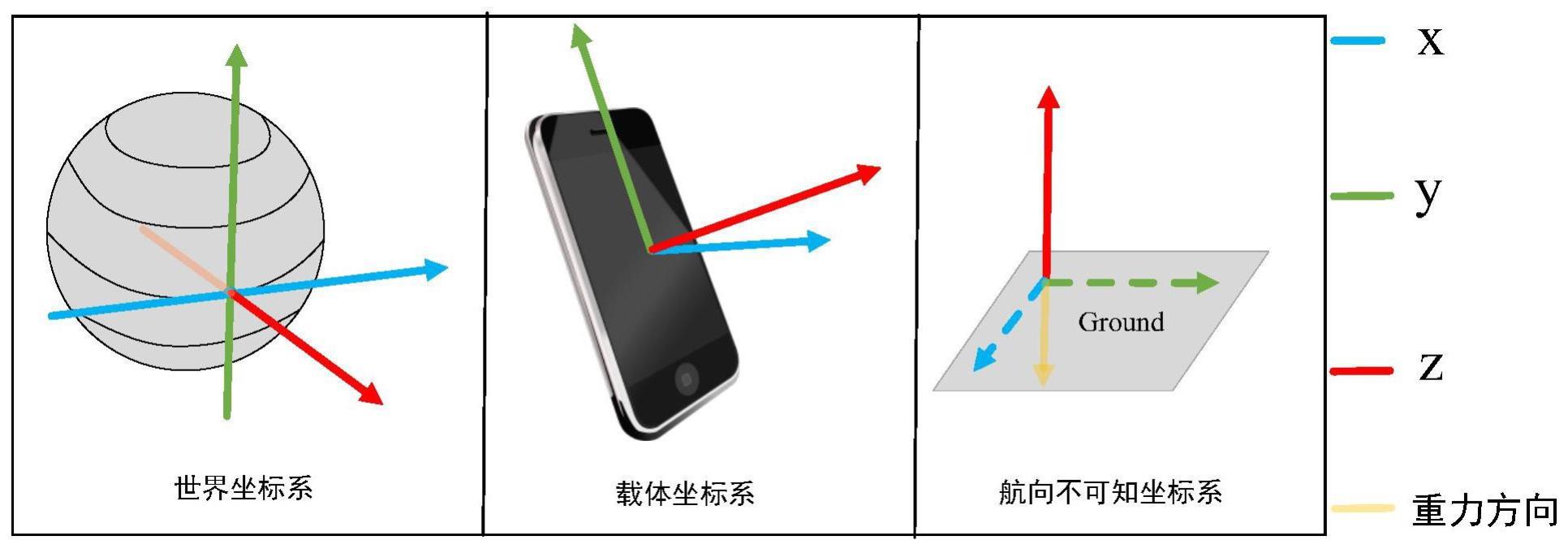
8、步骤2、坐标映射转换
9、将载体坐标系转换到hacf(航向不可知坐标系),具体计算方法如下:
10、
11、式中分别表示hacf和载体坐标系下的数据,rgrv是手机获取的游戏旋转矢量,通过游戏旋转矢量可以载体坐标系下的数据转换到hacf;
12、步骤3、联邦边缘模型和训练
13、联邦学习模型系统由一个中心服务器和n个客户端组成,其中每个客户端k(k=1,2,3...n)维护一个本地数据集dk,本地数据集的大小为|dk|=nk;同时中心服务器端也持有一份测试数据集dt,用于测试当前模型训练的结果;在第t个轮次开始时,中心服务器会随机挑选比例为c的客户记为|s|,参与到模型的训练过程中,中心服务器将全局模型权重wt下发给选中的客户端,在接收到wt之后,选中的每个客户端通过得到更新后的本地模型参数其中f(dk,wt)是一种损失函数;将本地的深度学习模型更新上传到中心服务器,中心服务器利用来更新全局模型参数;在每次得到新的全局模型后通过在数据集dt上进行测试,如果精确度满足需求或者轮数达到预先设置好的阈值则完成训练。
14、步骤4、坐标映射转换
15、将步骤3中航向不可知坐标系(hacf)下的二维速度矢量需要转换到步骤5中世界坐标系下;
16、步骤5、分段融合定位
17、经过步骤3训练得到的最优联邦边缘模型后,输入经过步骤2转换得到陀螺仪和加速度计三轴数据,最优联邦边缘模型输出得到的是航向不可知坐标系下的二维矢量速度vx和vy,这个速度矢量再通过坐标转换到世界坐标系下,将速度进行积分其中k代表时间,则可以获得位置信息,这个位置信息用于步骤5中进行数学建模,同时建模信息还需要边缘端的测距信息即z(k)=|p(k)-pbas|。
18、步骤3中,采用fedavg作为联邦学习模型训练的算法。
19、步骤3中,采用式(1)表示全局模型参数的更新:
20、
21、步骤3中,用于训练的深度学习模型采用的是resnet-18架构的1d版本,并在末尾添加一个具有512个单元的完全连接层,以回归2d速度矢量:
22、
23、步骤4中,首先将世界坐标系下和hacf下的数据转换到极坐标系,然后求取这段时间内极角度之差的统计平均值,从而将hacf下的预测值转换到世界坐标系下。
24、步骤5中的分段融合,是融合了步骤3中联邦学习的模型输出预测结果和边缘测距端测距结果,
25、如图4所示具体的方法:
26、步骤5.1获得uwb硬件的边缘测距值;
27、步骤5.2输入由步骤3中联邦学习模型输出预测结果和步骤5.1边缘测距端测距结果,进入步骤5.3;
28、步骤5.3根据测距阈值m判断行人是否在测距值覆盖范围内:
29、如果不在范围内(测距值大于m,此处m值设为20米),则采用输入惯导数据经过联邦边缘模型输出二维速度积分来预测位置信息;
30、如果在测距值范围内,则采用粒子滤波融合测距值与预测值。
31、步骤5.2中,采用粒子滤波融合中,需要建立系统的数学模型如式(3)所示,前三项公式是结合联邦边缘模型输出的二维速度矢量建立的状态方程,后一项是根据uwb硬件测距建立的观测方程:
32、
33、式中x(k)、y(k)分别是x轴和y轴方向累计的距离即位置信息,p(k)、z(k)分别是在k时刻行人的位置坐标和uwb基站锚点到手机的测距值,pbas是单uwb基站锚点的位置。wk、vk分别是过程噪声和观测噪声。先初始化粒子集合,{(xi,yi)|i=1,2,...,n},n是粒子的个数,x,y是粒子的二维位置,然后根据(3)式更新位置p(k)到p(k+1),对于每个粒子根据(3)(4)(5)更新粒子的权重。然后使重采样减少粒子的退化。
34、
35、
36、本发明创新性的使用了一种联邦学习数据驱动的惯性导航方法,可以解决集中式深度学习方法带来的问题,同时采用边缘端单锚点测距分段融合定位的方法,可以在低成本下极大的提高系统的定位精度。
技术特征:
1.一种基于联邦学习惯性导航融合定位方法,其特征在于,使用联邦边缘学习方法预测速度,获取定位信息,然后使用单锚点测距进行分段融合的方法。
2.如权利要求1所述的基于联邦学习惯性导航融合定位方法,其特征在于,包括:
3.如权利要求2所述的基于联邦学习惯性导航融合定位方法,其特征在于,步骤3中,采用fedavg作为联邦学习模型训练的算法。
4.如权利要求2所述的基于联邦学习惯性导航融合定位方法,其特征在于,步骤3中,采用式(1)表示全局模型参数的更新:
5.如权利要求2所述的基于联邦学习惯性导航融合定位方法,其特征在于,步骤3中,用于训练的深度学习模型采用的是resnet-18架构的1d版本,并在末尾添加一个具有512个单元的完全连接层,以回归2d速度矢量:
6.如权利要求2所述的基于联邦学习惯性导航融合定位方法,其特征在于,步骤4中,首先将世界坐标系下和hacf下的数据转换到极坐标系,然后求取这段时间内极角度之差的统计平均值,从而将hacf下的预测值转换到世界坐标系下。
7.如权利要求2所述的基于联邦学习惯性导航融合定位方法,其特征在于,步骤5中的分段融合,是融合了步骤3中联邦学习的模型输出预测结果和边缘测距端测距结果;
8.如权利要求7所述的基于联邦学习惯性导航融合定位方法,其特征在于,步骤5.2中,采用粒子滤波融合中,需要建立系统的数学模型如式(3)所示,前三项公式是结合联邦边缘模型输出的二维速度矢量建立的状态方程,后一项是根据uwb硬件测距建立的观测方程:
技术总结
一种基于联邦学习惯性导航融合定位方法,使用联邦边缘学习方法预测速度,获取定位信息,然后使用单锚点测距进行分段融合的方法,包括如下步骤:惯导数据输入;坐标映射转换;联邦边缘模型和训练;坐标映射转换;分段融合定位。本发明创新性的使用了一种联邦学习数据驱动的惯性导航方法,可以解决集中式深度学习方法带来的问题,同时采用边缘端单锚点测距分段融合定位的方法,可以在低成本下极大的提高系统的定位精度。
技术研发人员:刘儿兀,王杰,武业博,吴小龙
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!