基于KB镜纳米实验系统的高精度定位测量方法及装置
本发明属于同步辐射,具体涉及一种基于kb镜聚焦纳米实验系统的高精度定位测量方法及其装置。
背景技术:
1、高能同步辐射光源(heps),具有相较于三代光源更低的发射角,更高的亮度以及更高的能量等优秀性能,可以实现更高要求的实验需求,但这也对光束线实验站的稳定性提出了更苛刻的要求。经过光束线上精密光学器件分光、准直、聚焦后的光束进入到实验站,从而对样品扫描并完成实验。而纳米kb镜是光束线上最后一台关键光学设备,也是所有光学机械设备中对于稳定性要求最高的设备,它可以将光斑聚焦到纳米尺度,它的稳定性直接影响着光斑位置、尺寸以及光场分布。对于纳米kb镜实验系统来说,分处于两腔体的纳米kb镜与样品台间的稳定性也代表着光斑与样品的相对稳定性,两者的相对稳定性直接决定着实验是否能够正常进行,因此需要一套测量系统对该实验系统稳定性进行评估,以便后续对偏移进行补偿校正,从而完成实验。另外在稳定状态下,纳米kb镜与样品台间的相对位置误差要求在纳米量级(一般要求小于10nm),因此也对测量系统的精度及分辨率提出严格的要求。
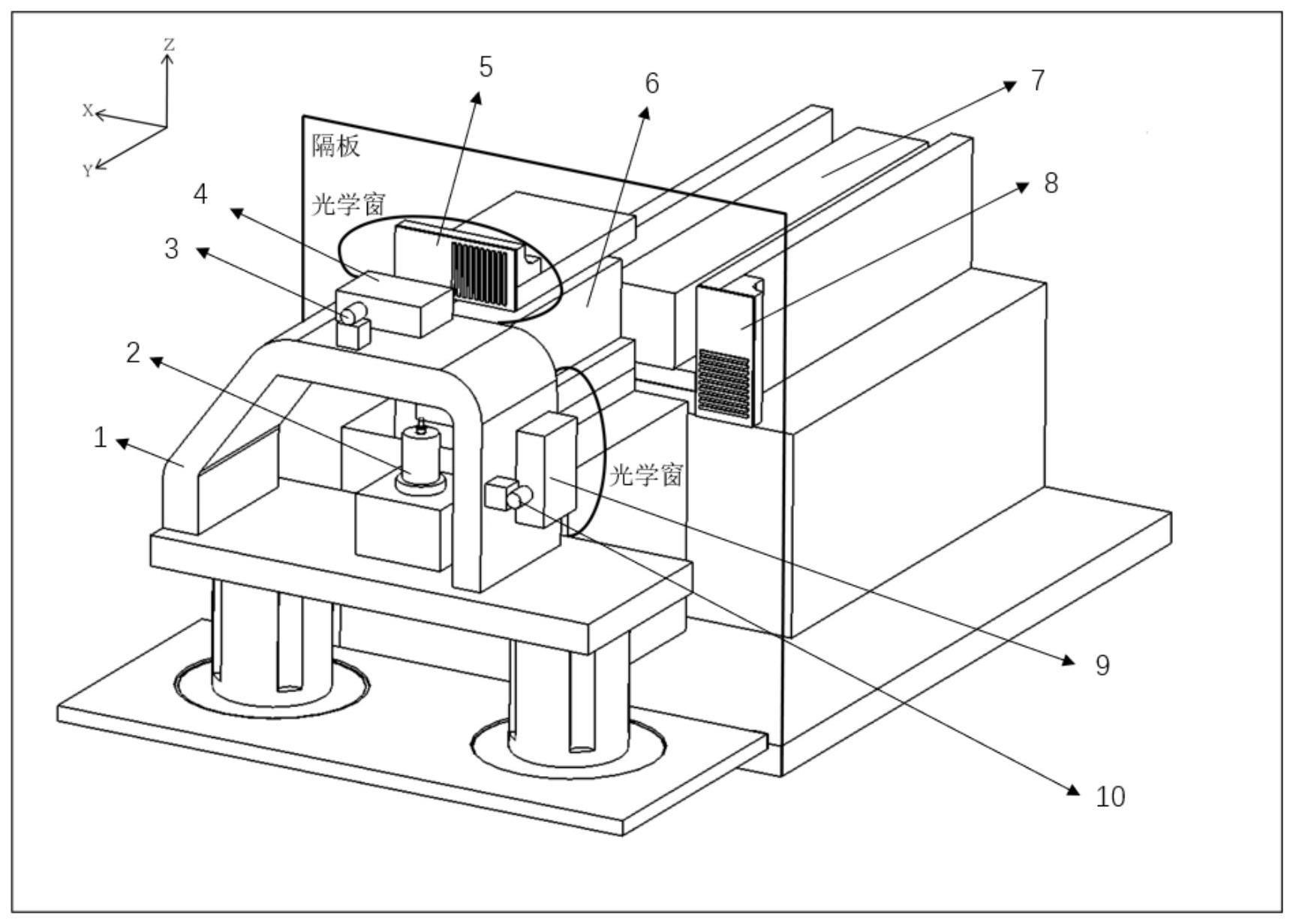
2、本发明主要针对第四代同步辐射光源高性能光束线站中先进的基于kb镜聚焦纳米实验系统,纳米kb镜实验系统示意图如图1所示,纳米kb镜实验系统包括纳米kb镜和样品台两部分,其中布置于纳米kb镜真空腔体中的纳米kb镜由vkb和hkb两块相互正交放置的镜子及其夹持调姿机构组成,两面反射镜分别实现垂直方向及水平方向聚焦,该腔体真空度要求高于1×10-7pa,而样品腔处于低真空环境中即可,一般真空度为1×10-1pa~10-4pa,样品腔中样品台上样品需要实现360°旋转,且两腔体被隔板分割。纳米kb镜及样品台分别有调姿机构进行姿态调节,且纳米kb镜的焦距极短,hkb末端与样品台间距离往往只有几十毫米,因此在空间上对紧凑性的要求也比较高。
3、针对于复杂而紧凑的两腔体环境,使用传统干涉仪测量法无法实现直接测量由于两个腔体分隔的结构限制以及阿贝偏置原理限制。
4、调研表明,目前针对同步辐射光源高分辨率实验系统的定位测量方法主要有两类:
5、第一类,第三方基准转移法,是将激光干涉仪放置在除纳米kb镜及样品台以外的第三方基准上,通过测量纳米kb镜和样品台分别相对于第三方基准的位移,通过计算转换,得到纳米kb镜及样品台之间的位移稳定性。图2为采用第三方基准测量方案示意图,其中图2(a)为通过第三方基准实现光学元件与样品台之间位移稳定性测量的方案示意图,光束a,b实现光学元件相对于样品台的x方向位移进行测量,光束c,d实现对光学元件相对于样品台z方向位移进行测量;其中图2(b)为通过第三方基准实现纳米kb镜与样品台之间位移稳定性测量的方案示意图,光束e,f实现对hkb相对于样品台的x方向位移进行测量,光束g,h实现对vkb相对于样品台z方向位移进行测量。
6、第二类,悬臂基准法,则是将激光干涉仪放置在光学元件及其调姿机构安装基板的延长悬臂上,并以此作为基准,认为光学元件同干涉仪保持运动一致,使测量光束i正入射在经过高加工精度的样品台表面,最后对携带有样品台位置信息的光束进行解调处理即可,该方案示意图如图3。由于光学元件同激光干涉仪保持运动一致,因此处理后得到的信息不仅仅是样品台相对于激光干涉仪的位置信息,也是样品台相对于光学元件的位置信息,即可直接实现光学元件与样品台间的定位测量。
7、方案一缺点:
8、1.该种测量方案中,第三方基准无法横穿过两不同腔体,只能实现同一腔体内的纳米kb镜及样品台间位移稳定性的测量,无法应用于不同腔体环境内。本发明中测量方法及装置可实现分处于两不同腔体内的纳米kb镜及样品台间位移稳定性的高精度测量。
9、2.该种测量方案中,还需要对第三方基准的稳定性进行复杂评估及分析以满足高精度位移稳定性的测量要求。第三方基准上的激光源相对地面具有一定距离,该距离会放大第三方基准不稳定性导致的误差,降低系统测量精度。在使用第三方基准测量时,对vkb及样品台z方向相对位移进行测量时该误差尤为明显。本发明中干涉仪组件同样品台保持同一基准,且整体光学布局紧凑,该误差影响极小,精度更高。
10、3.该种测量方案中,干涉仪测量光束需与待测部件运动方向相同,即垂直于x射线束流方向,且若想实现多维位移稳定性测量,则需要增加干涉仪数量并设计立体光路,如图2中所示,竖直方向和水平方向均需布置光路,这会增加成本并提高结构设计难度。本发明中测量光路仅沿x射线束流方向布局,其中干涉仪组件放置于样品台龙门架,目标光栅及平面镜放置于纳米kb镜基座上,即可实现在紧凑的空间内实现二维相对位移(测量光路相同方向相对位移及其垂直方向相对位移)测量,且本发明可以降低光路的立体设计难度。
11、4.该种测量方案中,在进行x位移稳定性测量时,测量光束需要保证正入射到圆柱形样品台的中心对称轴上,且要求圆柱形表面的精度极高,以保证测量光束可以原路反射,不发生丢失,这对加工精度及装配精度具有很高的要求。本发明将干涉仪组件及样品台布置在一起,测量光束打到kb镜上的目标光栅及平面镜即可进行测量,无需考虑圆柱样品的加工及装配。
12、5.该种方案中,同一维度测量的两光束若分属于不同激光光源,对两束光的处理存在不同步性,会引入较大误差。本发明采用单一激光源,具有良好的同步性,避免了由不同步性导致的误差。
13、方案二缺点:
14、1.该种方案中,悬臂无法穿过两不同腔体,更适用于处于同一腔体内的纳米kb镜及样品台间相对位置的高精度测量,无法直接实现处于不同腔体内的高分辨实验系统的定位测量,且在进行多维度定位测量时,由于存在阿贝偏置引起的阿贝误差也比较大。本发明可以实现对分处于两腔体的纳米kb镜与样品台间相对位置的高精度直接测量。
15、2.该种方案中,对干涉仪探头架设的延长悬臂的稳定性设计要求较为严格,尤其是悬臂结构较长的情况下,稳定性难以保证。如针对于本纳米kb镜实验系统,vkb相对样品台位置较远,这会使其悬臂大大延长,其稳定性就需要着重考虑。本发明无需进行悬臂结构设计,因此不受悬臂的不稳定性的影响。
16、3.该种方案中,即使只对vkb和hkb的任一维度进行位移稳定性测量,也需要两悬臂,这会使得两腔体的设计变得极为复杂,且增加装配的难度,若vkb和hkb均需实现两维度位移稳定性测量,共需要四个悬臂,在有限的空间内,对结构设计及加工装配的难度极大。本发明无需悬臂结构,且采用目标光栅及平面镜即可实现二维测量,且光学元件布局对腔体设计影响较小,只需着重考虑两腔体间隔板的光学窗布置设计即可。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的在于提供一种基于kb镜聚焦纳米实验系统的高精度定位测量方法及其装置。本发明对分属于不同腔体的纳米kb镜及样品台,在腔体分隔等结构限制及减小阿贝偏置等前提下,通过紧凑且具有高稳定性的光学布局,尽量降低误差来源以保证高精度的要求,最终实现对纳米kb镜(包括垂直反射镜vkb、水平反射镜hkb)与样品台之间三维度位移稳定性的直接测量,以解决纳米kb镜实验系统中纳米kb镜与样品处于两不同腔体环境下位置稳定性的高精度监测难点问题。
2、本发明涉及一种针对于同步辐射光源纳米聚焦实验系统中处于两个独立真空腔体的纳米kirkpatric-baez聚焦镜(简称纳米kb镜)和样品/样品台的高精度相对定位测量方法。本发明可实现对分处于不同腔体环境下的纳米kb镜及样品台的相对位置变化进行高精度测量,测量系统布置于腔体内,实现对两者相对位置的直接测量,降低间接测量引入的误差来源以提高测量精度,简化测量系统的复杂度,最终解决不同独立腔体环境下高精度位置监测与反馈的难点问题。该方法可以实现对纳米kb镜与样品台之间的x、y、z三个维度定位测量。
3、本发明涉及一种针对第四代同步辐射光源高性能光束线站中分处于不同腔体环境下的纳米kb镜实验系统的高精度定位测量系统,它是一种小巧、紧凑的光栅干涉三维位移测量装置,该系统由激光源、稳定性测量组件、光学窗、一体式光栅平面镜单元、控制与处理单元组成,其特征在于,包括:
4、1.针对分处于不同腔体环境中相对运动的纳米kb镜与样品台,其中激光源及稳定性测量组件布置在样品台侧,一体式光栅平面镜单元布置在纳米kb镜侧,光学窗布置在两者中间供测量光束通过;
5、2.基于上述1,形成单一测量(光束)方向与x射线束流方向重合的光路结构和三维定位测量方法;
6、3.通过vkb、hkb分别与样品台实现对二维相对位移(沿布局方向相对位移及与之相垂直方向相对位移)的高精度测量,即vkb与样品台间y、z方向相对位移和hkb与样品台间x、y方向相对位移,即可实现纳米kb镜系统与样品台间x、y、z三维度定位测量。
7、现有方案针对于特征1进行测量时,会极大增加腔体设计及加工难度,且会引入由长悬臂结构或者基准稳定性带来的误差;现有方案针对于特征2进行测量时,光路无法仅沿束线方向布局,且仅能实现单一维度相对位移(与光路布局相同方向相对位移)测量;现有方案针对于特征3进行测量时,测量系统无法仅在单一方向光路布局,需要进行双方向光路设计,这会增加光路布局的复杂度,并引入干涉仪偏置及悬臂结构稳定性引起的精度误差,即现有方案无法同时实现特征1、2、3。
8、本发明的技术方案为:
9、一种基于kb镜纳米实验系统的高精度定位测量装置,其特征在于,包括两独立的腔体和至少一套稳定性测量系统,所述稳定性测量系统包括一激光源、一稳定性测量组件、一目标光栅、一反射单元和信号处理单元;其中一腔体内设置纳米kb镜,所述纳米kb镜上设置所述目标光栅、反射单元,另一腔体内设置样品台,所述样品台上设置所述稳定性测量组件;或者其中一腔体内设置纳米kb镜,所述纳米kb镜上设置所述稳定性测量组件,另一腔体内设置样品台,所述样品台上设置所述目标光栅、反射单元;所述稳定性测量组件包括分光单元、回射单元、测量单元;
10、所述激光源用于为所述稳定性测量组件提供测量激光;
11、所述分光单元用于将所述测量激光分为两束光,分别用于测量样品台与纳米kb镜在两个方向上的位移;
12、第一束测量光束分别入射到第一方向上的第一测量单元作为参考光,以及经所述第一测量单元入射到所述目标光栅,所述目标光栅用于使入射光发生衍射产生频移并入射到所述回射单元,所述回射单元将入射光束经所述目标光栅入射到该第一测量单元作为测量光,入射到第一测量单元的参考光、测量光发生干涉后输入第一信号处理单元,第一信号处理单元根据收到的干涉信号计算得到第一方向上的位移;
13、第二束测量光束分别入射到第二方向上的第二测量单元作为参考光,以及入射到所述反射单元,所述反射单元将入射光反射到所述第二测量单元作为测量光,入射到第二测量单元的参考光、测量光发生干涉后输入第二信号处理单元,第二信号处理单元根据收到的干涉信号计算得到第二方向上的位移。
14、一种基于kb镜纳米实验系统的高精度定位测量装置,其特征在于,包括一腔体和至少一套稳定性测量系统,所述稳定性测量系统包括一激光源、一稳定性测量组件、一目标光栅、一反射单元和信号处理单元;所述腔体内设置纳米kb镜、样品台;
15、所述纳米kb镜上设置所述目标光栅、反射单元,所述样品台上设置所述稳定性测量组件;或者所述纳米kb镜上设置所述稳定性测量组件,所述样品台上设置所述目标光栅、反射单元;
16、所述稳定性测量组件包括分光单元、回射单元、测量单元;
17、所述激光源用于为所述稳定性测量组件提供测量激光;
18、所述分光单元用于将所述测量激光分为两束光,分别用于测量样品台与纳米kb镜在两个方向上的位移;
19、第一束测量光束分别入射到第一方向上的第一测量单元作为参考光,以及经所述第一测量单元入射到所述目标光栅,所述目标光栅用于使入射光发生衍射产生频移并入射到所述回射单元,所述回射单元将入射光束经所述目标光栅入射到该第一测量单元作为测量光,入射到第一测量单元的参考光、测量光发生干涉后输入第一信号处理单元,第一信号处理单元根据收到的干涉信号计算得到第一方向上的位移;
20、第二束测量光束分别入射到第二方向上的第二测量单元作为参考光,以及入射到所述反射单元,所述反射单元将入射光反射到所述第二测量单元作为测量光,入射到第二测量单元的参考光、测量光发生干涉后输入第二信号处理单元,第二信号处理单元根据收到的干涉信号计算得到第二方向上的位移。
21、进一步的,包括两套垂直方向安装的定位测量组件,第一套定位测量组件安装在x-y平面内,用于测量纳米kb镜中的hkb与样品台在x、y方向上的位移;第二套定位测量组件安装在y-z平面内,用于测量纳米kb镜中的vkb与样品台在y、z方向上的位移。
22、进一步的,所述测量激光包含频率不同且线偏振方向正交的第一偏振分量和第二偏振分量;第一方向上的第一测量单元包括第一直角反射棱镜301、第一偏振分光棱镜302、第一角锥棱镜303、第一四分之一波片401和第二四分之一波片403;第二方向上的第二测量单元包括第二直角反射棱镜202、第二角锥棱镜304、第三角锥棱镜306、第二偏振分光棱镜305、第三四分之一波片404;
23、所述分光单元将所述测量激光分为两束偏振态及光强相同的两束光,其中一束记为光束a,另一束记为光束b;光束a经过第一偏振分光棱镜302后分为p光和s光;
24、光束a所分出的p光作为第一测量光,在通过第二四分之一波片403后由p光变为圆偏振光正入射至目标光栅501并发生+1级衍射即第一次衍射,该+1衍射光以利特罗角入射至回射单元402返回,入射至目标光栅501后发生第二次衍射,衍射光经过第二四分之一波片403后由圆偏振光变为s光,该s光经第一偏振分光棱镜302反射后入射至第一角锥棱镜303,第一角锥棱镜303的出射光经第一偏振分光棱镜302反射后通过第二四分之一波片403,由s光变为圆偏振光正入射至目标光栅501并发生+1级衍射即第三次衍射,以利特罗角入射至回射单元402返回,入射至目标光栅501后发生第四次衍射后经过第二四分之一波片403后由圆偏振光变为p光,透射过第一偏振分光棱镜302并作为一路测量光;
25、光束a所分出的s光作为第二测量光,经第一偏振分光棱镜302反射至第一直角反射棱镜301,随后出射光经过第一四分之一波片401,并由s光变为圆偏振光正入射至目标光栅501并发生-1级衍射即第一次衍射,该-1级衍射光以利特罗角入射至回射单元402并原路返回,入射至目标光栅501后发生第二次衍射后经过第一四分之一波片401后由圆偏振光变为p光,该p光经第一直角反射棱镜301反射,随后透射过第一偏振分光棱镜302并入射至第一角锥棱镜303,第一角锥棱镜303的出射光透过第一偏振分光棱镜302,随后入射第一直角反射棱镜301并垂直出射,出射光通过第一四分之一波片401后由p光变为圆偏振光后正入射至目标光栅501并发生-1级衍射即第三次衍射,以利特罗角入射至回射单元402并原路返回,再次入射至目标光栅501后发生第四次衍射后经过第一四分之一波片401后由圆偏振光变为s光,经第一直角反射棱镜301反射后,出射s光入射至第一偏振分光棱镜302并反射,反射光同透射过第一偏振分光棱镜302的第一测量光发生重合,产生干涉信号,并传到第一信号处理单元com;
26、光束b入射至第二直角反射棱镜202后垂直出射,出射光入射至第二偏振分光棱镜305,在第二偏振分光棱镜305处被分为两正交偏振的p光及s光;
27、光束b所分出的p光透射过第二偏振分光棱镜305后经过第三四分之一波片404,偏振态由p光转变为圆偏振光并正入射至反射单元502,随后原路反射至第三四分之一波片404后,由圆偏振光变为s光并入射至第二偏振分光棱镜305后,光束被反射至第三角锥棱镜306,第三角锥棱镜306的出射光被第二偏振分光棱镜305反射,反射的s光依次经第三四分之一波片404、反射单元502后反射经第三四分之一波片404、第二偏振分光棱镜305入射至第二直角反射棱镜202作为一路测量光;
28、光束b所分出的s光经第二偏振分光棱镜305反射至第二角锥棱镜304,第二角锥棱镜304出射的s光依次经第二偏振分光棱镜305、第二直角反射棱镜202反射后与测量光发生重合,产生干涉信号,并传到第二信号处理单元com。
29、进一步的,所述激光源位于所述腔体内,采用光纤将激光源馈入至所述稳定性测量组件,为所述稳定性测量组件提供测量激光;或者所述激光源位于所述腔体外,其输出的测量激光直接透过光学入射窗射入至腔内,为所述稳定性测量组件提供测量激光;所述分光单元为非偏振分光棱镜或分光光栅;所述目标光栅为反射光栅或透射光栅,当所述目标光栅为透射光栅时,所述回射单元位于所述透射光栅的后面;所述反射单元为平面镜或光栅。
30、一种基于kb镜纳米实验系统的高精度定位测量装置,其特征在于,包括两独立的腔体和至少一套稳定性测量系统,所述稳定性测量系统包括一激光源、一稳定性测量组件、一目标光栅和信号处理单元;其中一腔体内设置纳米kb镜,所述纳米kb镜上设置所述目标光栅,另一腔体内设置样品台,所述样品台上设置所述稳定性测量组件;或者其中一腔体内设置纳米kb镜,所述纳米kb镜上设置所述稳定性测量组件,另一腔体内设置样品台,所述样品台上设置所述目标光栅;所述稳定性测量组件包括回射单元、测量单元;
31、所述激光源用于为所述稳定性测量组件提供测量激光;
32、所述测量激光分别入射到所述测量单元作为参考光,以及经所述测量单元入射到所述目标光栅,所述目标光栅用于使入射光发生衍射产生频移并入射到所述回射单元,所述回射单元将入射光束经所述目标光栅入射到所述测量单元作为测量光,入射到所述测量单元的参考光、测量光发生干涉后输入所述信号处理单元,所述信号处理单元根据收到的干涉信号计算得到样品台与纳米kb镜的位移。
33、一种基于kb镜纳米实验系统的高精度定位测量装置,其特征在于,包括两独立的腔体和至少一套稳定性测量系统,所述稳定性测量系统包括一激光源、一稳定性测量组件、一反射单元和信号处理单元;其中一腔体内设置纳米kb镜,所述纳米kb镜上设置所述反射单元,另一腔体内设置样品台,所述样品台上设置所述稳定性测量组件;或者其中一腔体内设置纳米kb镜,所述纳米kb镜上设置所述稳定性测量组件,另一腔体内设置样品台,所述样品台上设置所述反射单元;所述稳定性测量组件包括回射单元、测量单元;
34、所述激光源用于为所述稳定性测量组件提供测量激光;
35、所述测量激光分别入射到所述测量单元作为参考光,以及经所述测量单元入射到所述反射单元,所述反射单元将入射光反射到所述测量单元作为测量光,入射到所述测量单元的参考光、测量光发生干涉后输入所述信号处理单元,所述信号处理单元根据收到的干涉信号计算得到样品台与纳米kb镜的位移。
36、进一步的,通过在一不透明材质的腔体中设置一中间隔板得到两所述腔体;所述中间隔板上设有光学窗,用于两腔体内的测量光束通过;或者两所述腔体均为不透明材质的腔体且在两所述腔体相对的面上分别设置光学窗,用于两腔体内的测量光束通过;或者两所述腔体为透明材质腔体。
37、一种基于多维度定位测量装置的定位测量方法,其步骤包括:
38、1)所述激光源将输出的测量激光入射到所述分光单元,所述分光单元将所述测量激光分为两束光;
39、2)第一束测量光束入射到第一方向上的第一测量单元作为参考光,同时第一束测量光束经所述第一测量单元入射到所述目标光栅,所述目标光栅使入射光发生衍射产生频移并入射到所述回射单元;
40、3)所述回射单元将入射光束经所述目标光栅入射到该第一测量单元作为测量光;
41、4)入射到第一测量单元的参考光、测量光发生干涉后输入第一信号处理单元,第一信号处理单元根据收到的干涉信号计算得到样品台与纳米kb镜在第一方向上的位移;
42、5)第二束测量光束入射到第二方向上的第二测量单元作为参考光,同时第二束测量光束入射到所述反射单元;
43、6)所述反射单元将入射光反射并入射到所述第二测量单元作为测量光;
44、7)入射到第二测量单元的参考光、测量光发生干涉后输入第二信号处理单元,第二信号处理单元根据收到的干涉信号计算得到样品台与纳米kb镜在第二方向上的位移。
45、一种基于单一维度定位测量装置的定位测量方法,其步骤包括:
46、1)所述激光源将输出的测量激光入射到所述测量单元作为参考光,同时所述测量激光经所述测量单元入射到所述目标光栅;
47、2)所述目标光栅使入射光发生衍射产生频移并入射到所述回射单元;
48、3)所述回射单元将入射光束经所述目标光栅入射到所述测量单元作为测量光;
49、4)入射到所述测量单元的参考光、测量光发生干涉后输入所述信号处理单元;
50、5)所述信号处理单元根据收到的干涉信号计算得到样品台与纳米kb镜的位移。
51、本发明的优点如下:
52、本发明结合激光干涉仪与光栅测量,将测量光路沿x射线束流方向布局,使用紧凑的光学布局实现对分属于不同腔体环境中的纳米kb镜及样品台间的三维度位移进行高精度直接测量,同时通过对测量光路细分,进一步提高了系统的分辨率。
53、本发明中沿x射线束流方向直接测量的光路布局相较于传统干涉仪测量法中与运动方向平行的光路布局,避免了对腔体及悬臂的复杂设计以及稳定性测定,减小了机械设计及加工的任务量,降低了对样品台加工及装配精度,同时也避免了复杂的立体光路设计,采用直接测量的方法也减少了误差来源,保证了对精度的要求。
- 还没有人留言评论。精彩留言会获得点赞!