在对称均匀线性阵列下近场信号源的参数估计方法
本发明涉及近场信号源定位,具体涉及在对称均匀线性阵列下近场信号源的参数估计方法。
背景技术:
1、场源定位问题是阵列信号处理领域的一个重要研究内容,在地下探测、电子通讯、航空等诸多领域发挥着重要作用。场源定位是设置传感器阵列,再根据阵列接收到的电磁波,构造统计量之后对其进行计算来估计场源参数的过程。
2、传统的子空间类算法或基于旋转不变性类算法可以直接估计出远场信号的波达角度。但是随着室内智能设备的兴起,远场信号估计算法已经不足以满足对室内设备定位的需求,对近场定位算法的研究变得更加重要。
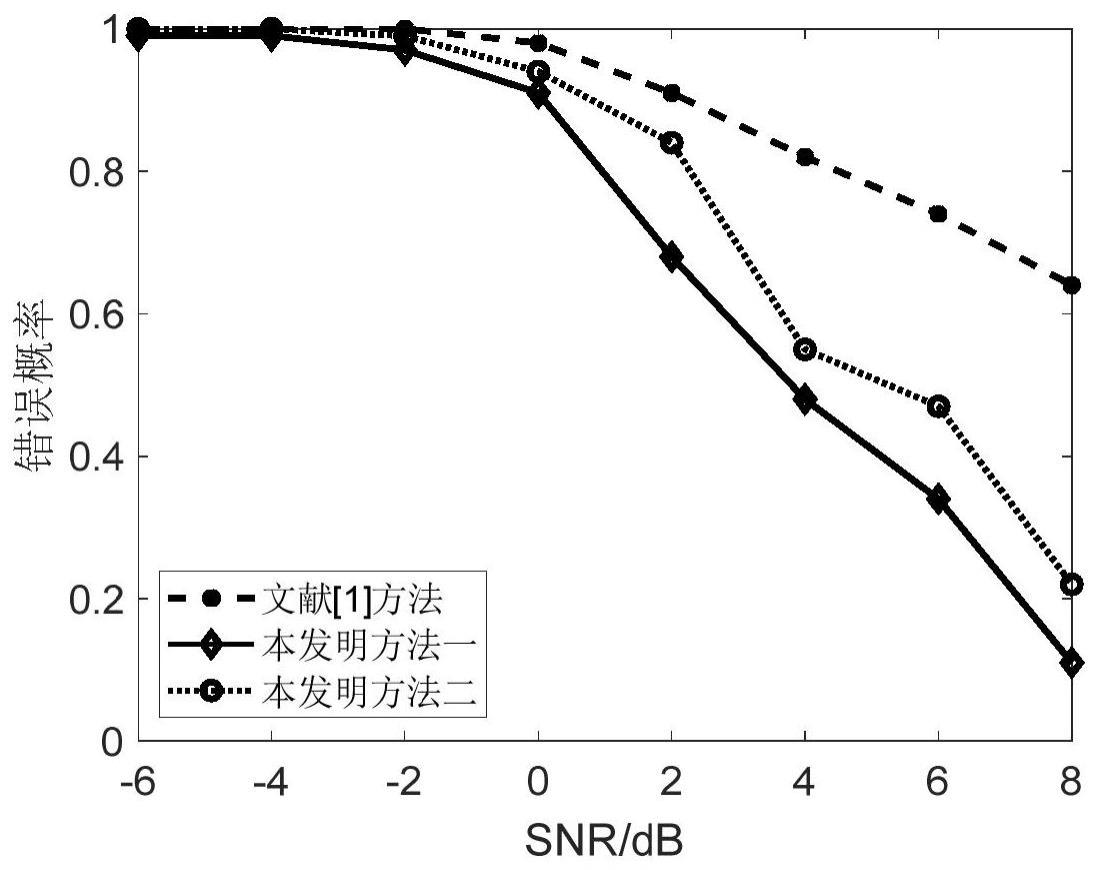
3、相关技术中,文献simplified high-order doa and range estimation withlinear antenna array[j].ieee communications letters,2017,21(1):76-79(以下简称为文献[1])提出一种均匀对称阵列下基于累量矩阵的快速近场定位算法,该算法能够在仅构造一个累量矩阵的情况下实现近场参数的有效估计,不过由于该算法仅使用了信息含量较少的右奇异向量估计角度,其中近场角度的分辨率和估计精度都稍有不佳。文献cn111308416a提出了一种近场信号的参数估计,它仅能针对非圆信号,不能适用于任意信号,所构造的四阶累量矩阵维数也较高,这就造成了在构造时的运算复杂度也较高。文献passive localization of mixed near-field and far-field sources using two-stage music algorithm[j].ieee transactions on signal processing,2009,58(1):108-120构造了两个高阶累量矩阵,一个是四阶累量矩阵,另一个是四个四阶累量的组合矩阵,并用music方法分别对两个矩阵进行一维谱峰搜索估计近场的角度和距离。文献mixed-order music algorithm for localization of far-field and near-field sources[j].ieee signal processing letters,2013,20(4):311-314和localization of mixedfar-field and near-field sources via cumulant matrix reconstruction[j].ieeesensors journal,2018,pp:1-1均构造了一个四阶累量矩阵和一个二阶的协方差矩阵估计参数。这些算法都构造两个矩阵用于参数估计,然后对这两个矩阵分别使用esprit方法或者一维music方法估计近场的两个参数,构造多个累量矩阵,无疑增加了计算复杂度。还有许多基于协方差矩阵的近场源定位算法,这些算法分辨能力和估计精度较四阶统计量方法精度均有所降低。
技术实现思路
1、针对现有技术中近场信号源定位存在的技术问题,本发明提供在对称均匀线性阵列下近场信号源的参数估计方法,目的是在较少计算量的情况下,提高近场定位算法角度估计的分辨率和估计精度。
2、本发明通过以下技术方案实现:
3、在对称均匀线性阵列下近场信号源的参数估计方法,包括:
4、采用按照对称均匀线性阵列排布的传感器阵列接收近场信号源的信号,并根据接收的信号构造四阶累量矩阵;
5、对四阶累量矩阵进行奇异值分解,得到左奇异向量和右奇异向量,左奇异向量张成信号子空间和噪声子空间;右奇异向量张成信号子空间和噪声子空间;
6、利用左奇异向量对应的信号子空间旋转不变特性,使用esprit-like算法估计得到近场信号源的角度,或者,利用左奇异向量对应的信号子空间旋转不变特性及右奇异向量对应的噪声子空间与方向向量的正交关系估计得到近场信号源的角度。
7、优选的,传感器阵列为阵元间距为d,阵元个数为l=2n+1个的线性对称阵列,近场信号源数量为k,近场信号源的信号波长为λ,则t时刻传感器阵列的接收信号表示为x(t)=ansn(t)+n(t),其中an是阵列流型,an=[a(θ1,r1),...,a(θk,rk),...,a(θk,rk)],θk是第k个近场信号源的角度,rk是第k个近场信号源的距离,k=1,2,…,k,sn是k个近场信号源的信号,sn(t)=[s1(t),s2(t),...,sk(t),...,sk(t)]t,sk(t)为第k个近场信号源的信号,n(t)=[n-n(t),...,n0(t),…,nn(t),...,nn(t)]t,nn(t)为第n个传感器阵元所受到的高斯白噪声,导向矢量
8、优选的,构造得到的四阶累量矩阵c1表示为:
9、
10、其中,a1的第k列为a2的第k列为
11、其中,k=1,2,…,k,k为近场信号源的数量,2n+1为阵元个数,θk为第k个近场信号源的角度,rk是第k个近场信号源的距离,d为阵元间距,λ为近场信号源的信号波长,j为虚数单位,ck为第k个近场信号源的四阶累积量,定义为
12、进一步的,对四阶累量矩阵进行奇异值分解,具体是:
13、
14、其中,c1是四阶累量矩阵,σs∈rk×k和σf∈r(l-k)×(l-k)是对角矩阵,构成元素分别为k个大奇异值和l-k个小奇异值,us∈cl×k和uf∈cl×(l-k)分别是由左奇异向量张成的信号子空间和噪声子空间,vs∈cl×k和vf∈cl×(l-k)分别是由右奇异向量张成的信号子空间和噪声子空间,信号子空间的奇异向量对应k个大奇异值,噪声子空间的奇异向量对应l-k个小奇异值;
15、其中,l=2n+1为阵元的数量。
16、进一步的,利用左奇异向量对应的信号子空间旋转不变特性估计近场信号源的角度,具体为:通过对式(14)代表的角度谱进行谱峰搜索,得到近场信号源角度的估计值;
17、p(θ)=[det(whjus2-whψ(ω)us1)]-1 (14)
18、其中,w为2n×n1维的满秩矩阵,j为2n×2n维的交换矩阵,ψ(ω)=diag(ej2nω,ej2(n-1)ω,...,ej2(1-n)ω),n1为大于n且小于等于2n的任意整数,us1和us2是对左奇异向量对应的信号子空间us进行相似分块得到,如公式(12)所示:
19、
20、进一步的,利用左奇异向量对应的信号子空间旋转不变特性及右奇异向量对应的噪声子空间与方向向量的正交关系估计得到近场信号源的角度,具体为:通过对式(15)代表的角度谱进行谱峰搜索,得到近场信号源角度的估计值;
21、p(θ)=[det(whjus2-whψ(ω)us1)×(a1h(θ)vfvfha1(θ))]-1 (15)
22、其中,w为2n×n1维的满秩矩阵,j为2n×2n维的交换矩阵,ψ(ω)=diag(ej2nω,ej2(n-1)ω,...,ej2(1-n)ω),n1为大于n且小于等于2n的任意整数,us1和us2是对左奇异向量对应的信号子空间us进行相似分块得到,如公式(12)所示:
23、
24、优选的,还包括:估计近场信号源的距离。
25、进一步的,估计近场信号源的距离具体是:根据估计得到的近场信号源的角度,对左奇异向量用music方法估计得到近场信号源的距离。
26、进一步的,还包括:估计近场信号源的距离,具体为:对式(16)代表的角度谱进行谱峰搜索,谱峰位置对应的即是近场信号源距离的估计值;
27、
28、其中,为近场信号源的角度估计值。
29、与现有技术相比,本发明具有如下的有益效果:
30、本发明仅构造了一个四阶累量矩阵,对一个非厄密特对称的四阶累量矩阵奇异值分解后,得到左奇异向量和右奇异向量以及相应的信号子空间和噪声子空间。接下来方法一首先利用大奇异值对应的左奇异向量所张成的信号子空间,利用其信号子空间的旋转不变特性,使用esprit-like算法估计近场角度(近场信号源的角度),方法二在方法一的基础上,结合利用小奇异值对应的右奇异向量张成的噪声子空间与方向矢量的正交关系,估计近场角度。与传统的高阶累量方法相比,本发明中只构造一个四阶累量矩阵以及对其进行一次奇异值分解就可以估计近场的参数,减少了计算量,并且与现有的快速近场定位技术(文献[1])相比,本发明中的累量矩阵和其左奇异向量含有更加丰富的信息,提高了角度的分辨率和估计精度。
31、进一步的,在估计得到近场角度后,再利用小奇异值对应的左奇异向量张成的噪声子空间与方向矢量正交的关系,也即利用music算法估计近场距离(近场信号源的距离)。
- 还没有人留言评论。精彩留言会获得点赞!