非接触式轮轨动态姿态参数在线视觉测量方法及系统
本发明涉及三维点云视觉测量,具体涉及一种非接触式轮轨动态姿态参数在线视觉测量方法及系统。
背景技术:
1、非接触式轮轨动态姿态参数的在线视觉测量是轮轨姿态参数检测的核心技术,对监控轮轨运行实况、保障轨道交通安全具有重要意义。
2、将结构光投射到被测目标表面,利用相机对投射区域进行拍摄,通过立体视觉测量原理对被测投射目标进行三维重建,得到目标相廓形点云,从而计算出相关物理参数的方法是一种非接触的测量方法,在三维成像、工业产品质量检测、钢轨探伤检测等多个领域有广泛应用。现有列车运行时捕捉轮轨运动姿态技术多借助传感器辅助人工判断,测量过程具有一定的安全隐患。
技术实现思路
1、本发明的目的在于提供一种非接触式轮轨动态姿态参数在线视觉测量方法及系统,以解决上述背景技术中存在的至少一项技术问题。
2、为了实现上述目的,本发明采取了如下技术方案:
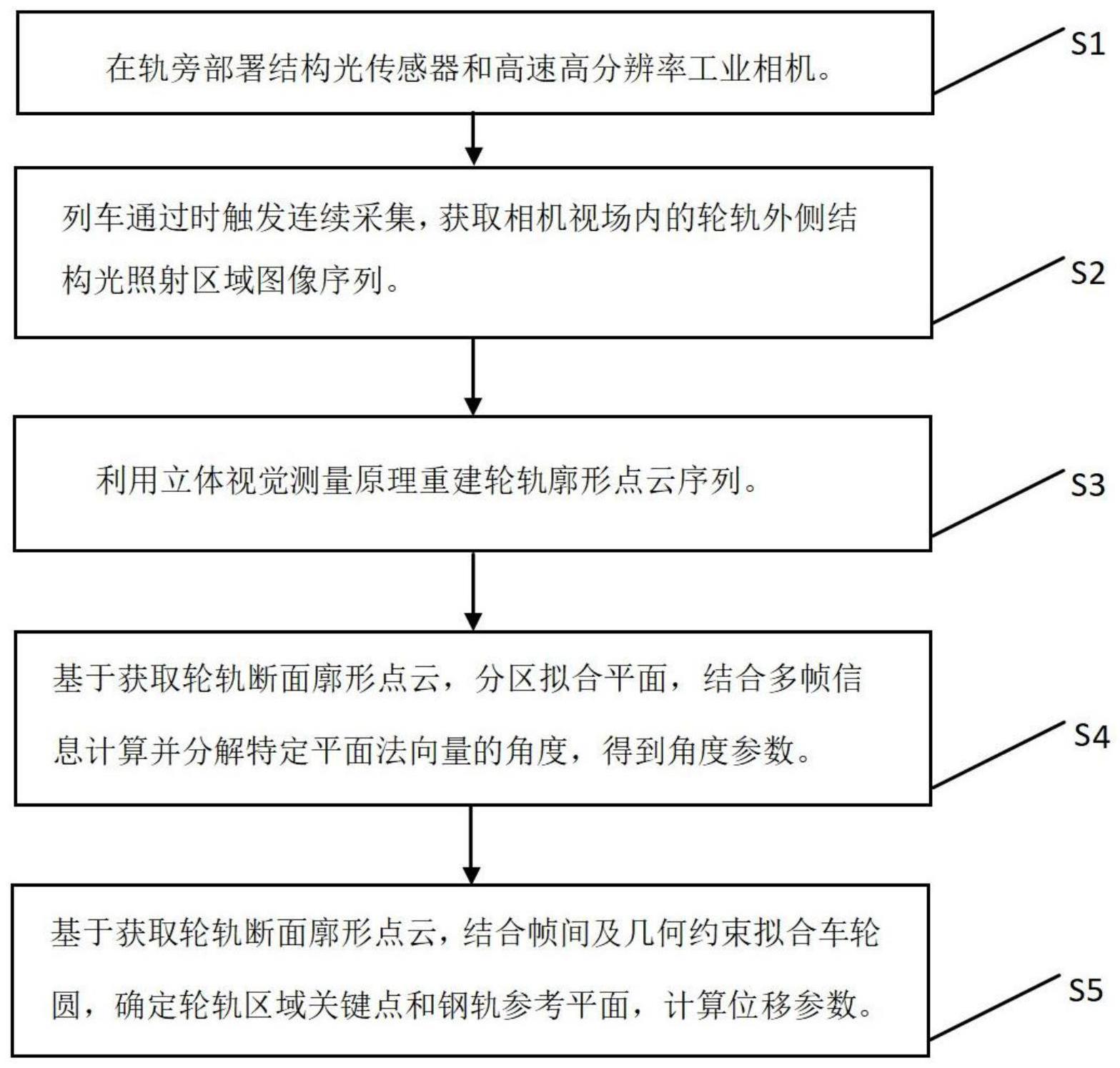
3、一方面,本发明提供一种非接触式轮轨动态姿态参数在线视觉测量方法,包括:
4、获取轮轨外侧结构光照射断面区域图像序列;
5、针对获取的轮轨外侧结构光照射断面区域图像序列,基于立体视觉测量原理,根据标定参数重建轮轨断面廓形点云序列;
6、基于重建的轮轨断面廓形点云序列,分区拟合平面,结合多帧信息计算并分解特定平面法向量的角度,得到角度参数;
7、基于重建的轮轨断面廓形点云序列,结合帧间及几何约束拟合车轮圆,确定轮轨区域关键点和钢轨参考平面,计算轮轨位移参数。
8、优选的,获取轮轨外侧结构光照射断面区域图像序列包括:在采集轮轨结构光图像前,利用标准棋盘格标定板对相机和结构光传感器进行标定;列车通过时触发采集,获取相机视场内的轮轨外侧结构光照射区域图像序列。
9、优选的,根据利用标准棋盘格标定板对相机和结构光传感器进行标定的参数重建轮轨断面廓形点云序列。
10、优选的,计算角度参数包括:
11、定义坐标系,其中,坐标系的x轴方向垂直于钢轨延伸方向向外,y轴方向平行于钢轨延伸方向,z轴垂直于地面且向上;
12、基于t时刻的实测点云数据st,分区拟合沿z轴方向自上而下的三个平面,分别计算相邻两个平面间的法向量夹角,结合前帧信息,计算得到修正后的夹角;
13、绕z轴旋转角度为摇头角;绕y轴旋转角度为侧滚角;其中,分别分解修正后的两个法向量夹角,得到各自的摇头角和侧滚角;
14、根据分解得到的摇头角和侧滚角,计算t时刻摇头角和侧滚角。
15、优选的,计算轮轨位移参数包括:
16、定义坐标系,其中,坐标系的x轴方向垂直于钢轨延伸方向向外,y轴方向平行于钢轨延伸方向,z轴垂直于地面且向上;
17、基于t时刻的实测点云数据st,分区拟合沿z轴方向自上而下的三个平面,根据三个平面的法向量,计算平面p的方程;
18、利用角点检测算法,寻找车轮区域特征点,结合多帧运动及几何约束拟合特征点所在的空间圆。约束如下:1)车轮圆心在z轴方向上存在有限的运动范围;2)车轮圆半径存在几何先验信息,定义拟合圆,寻找拟合圆上距离平面p最近的点,视为车轮区域关键点;
19、z轴方向的位移为沉浮量;x轴方向的位移为横移量;其中,计算车轮区域关键点在z轴方向与平面p的欧氏距离得到沉浮量,计算车轮区域关键点在x轴方向与平面p的欧式距离得到横移量。
20、优选的,修正两个法向量夹角αt和βt的方程为:
21、其中和依次为三个平面的拟合误差,表示当前帧的夹角可信度,表示前t-1帧可信度均值,表示前t-1帧夹角均值;
22、计算t时刻的摇头角λt和侧滚角μt为:
23、其中和均为权重系数,默认为1。
24、计算平面p的方程为:
25、其中,分别为三个平面的法向量,(xi,yi,zi)为第i个交点的空间坐标。
26、第二方面,本发明提供一种非接触式轮轨动态姿态参数在线视觉测量系统,包括:
27、获取模块,用于获取轮轨外侧结构光照射断面区域图像序列;
28、构建模块,用于针对获取的轮轨外侧结构光照射断面区域图像序列,基于立体视觉测量原理,根据标定参数重建轮轨断面廓形点云序列;
29、第一计算模块,用于基于重建的轮轨断面廓形点云序列,分区拟合平面,结合多帧信息计算并分解特定平面法向量的角度,得到角度参数;
30、第二计算模块,用于基于重建的轮轨断面廓形点云序列,结合帧间及几何约束拟合车轮圆,确定轮轨区域关键点和钢轨参考平面,计算轮轨位移参数。
31、第三方面,本发明提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现如上所述的非接触式轮轨动态姿态参数在线视觉测量方法。
32、第四方面,本发明提供一种计算机程序产品,包括计算机程序,所述计算机程序当在一个或多个处理器上运行时,用于实现如上所述的非接触式轮轨动态姿态参数在线视觉测量方法。
33、第五方面,本发明提供一种电子设备,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,使电子设备执行实现如上所述的非接触式轮轨动态姿态参数在线视觉测量方法的指令。
34、本发明有益效果:能够以无接触的方式简单、准确、安全地对车轮在列车运行过程中出现的横移量、沉浮量、摇头角和侧滚角进行测量;为轮轨运动姿态的非接触式测量提供了快速、准确、可靠的理论技术支持。
35、本发明附加方面的优点,将在下述的描述部分中更加明显的给出,或通过本发明的实践了解到。
技术特征:
1.一种非接触式轮轨动态姿态参数在线视觉测量方法,其特征在于,包括:
2.根据权利要求1所述的非接触式轮轨动态姿态参数在线视觉测量方法,其特征在于,获取轮轨外侧结构光照射断面区域图像序列包括:在采集轮轨结构光图像前,利用标准棋盘格标定板对相机和结构光传感器进行标定;列车通过时触发采集,获取相机视场内的轮轨外侧结构光照射区域图像序列。
3.根据权利要求2所述的非接触式轮轨动态姿态参数在线视觉测量方法,其特征在于,根据利用标准棋盘格标定板对相机和结构光传感器进行标定的参数重建轮轨断面廓形点云序列。
4.根据权利要求1所述的非接触式轮轨动态姿态参数在线视觉测量方法,其特征在于,计算角度参数包括:
5.根据权利要求4所述的非接触式轮轨动态姿态参数在线视觉测量方法,其特征在于,计算轮轨位移参数包括:
6.根据权利要求5所述的非接触式轮轨动态姿态参数在线视觉测量方法,其特征在于,修正两个法向量夹角αt和βt的方程为:
7.一种非接触式轮轨动态姿态参数在线视觉测量系统,其特征在于,包括:
8.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现如权利要求1-6任一项所述的非接触式轮轨动态姿态参数在线视觉测量方法。
9.一种计算机程序产品,其特征在于,包括计算机程序,所述计算机程序当在一个或多个处理器上运行时,用于实现如权利要求1-6任一项所述的非接触式轮轨动态姿态参数在线视觉测量方法。
10.一种电子设备,其特征在于,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现如权利要求1-6任一项所述的非接触式轮轨动态姿态参数在线视觉测量方法的指令。
技术总结
本发明提供一种非接触式轮轨动态姿态参数在线视觉测量方法及系统,属于三维点云视觉测量技术领域,针对获取的轮轨外侧结构光照射断面区域图像序列,基于立体视觉测量原理,根据标定参数重建轮轨断面廓形点云序列;基于重建的轮轨断面廓形点云序列,分区拟合平面,结合多帧信息计算并分解特定平面法向量的角度,得到角度参数;基于重建的轮轨断面廓形点云序列,结合帧间及几何约束拟合车轮圆,确定轮轨区域关键点和钢轨参考平面,计算轮轨位移参数。本发明能够以无接触的方式简单、准确、安全地对车轮在列车运行过程中出现的横移量、沉浮量、摇头角和侧滚角进行测量;为轮轨运动姿态的非接触式测量提供了快速、准确、可靠的理论技术支持。
技术研发人员:尹辉,黄华,许宏丽,李爽爽,潘禹辰,高亮,张英俊,杜倩倩,杨莹,高瑞锴,苗帅杰
受保护的技术使用者:北京交通大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!