目标监测方法、装置、设备及存储介质与流程
本发明涉及信息处理,尤其涉及一种目标监测方法、装置、设备及存储介质。
背景技术:
1、环境感知是汽车行驶过程中重要的功能之一,汽车中环境感知的作用,就如人的双眼一样重要,其主要的环境感知内容,包括对道路边界的检测和路面障碍物的跟踪。
2、而行人作为交通环境中的重要参与者,其动作灵活多变,极易造成不必要的交通事故,而目前车辆的环境感知能力较为单一,无法准确地对车辆周围环境信息进行感知,因此车辆行驶过程中无法准确地识别出障碍物和行人等个体,导致车辆行驶过程中存在较大的安全隐患。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种目标监测方法、装置、设备及存储介质,旨在解决现有技术中车辆的环境感知能力较为单一,无法准确地对车辆周围环境进行感知,导致车辆行驶过程中存在安全隐患的技术问题。
2、为实现上述目的,本发明提供了一种目标监测方法,所述方法包括以下步骤:
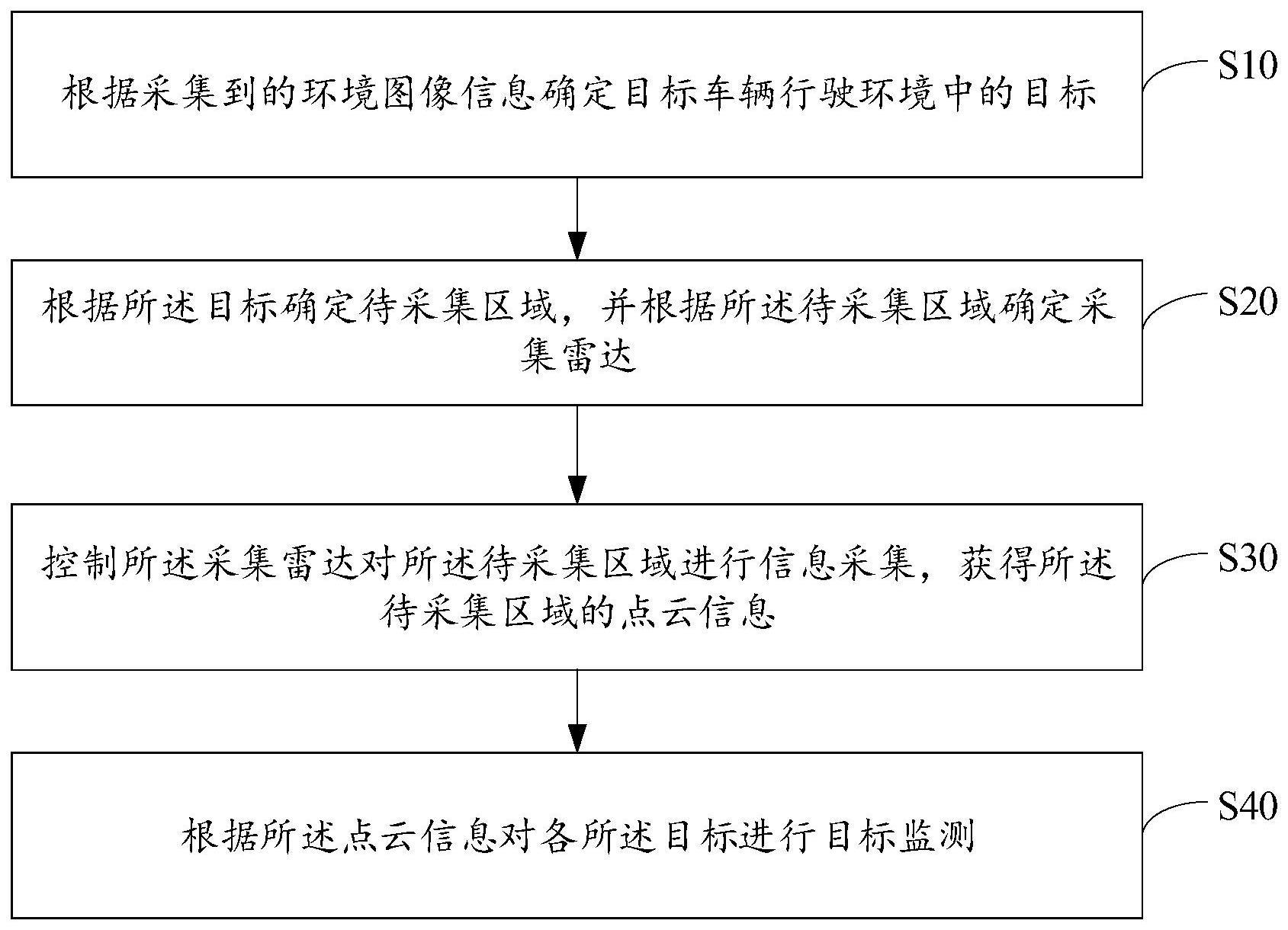
3、根据采集到的环境图像信息确定目标车辆行驶环境中的目标;
4、根据所述目标确定待采集区域,并根据所述待采集区域确定采集雷达;
5、控制所述采集雷达对所述待采集区域进行信息采集,获得所述待采集区域的点云信息;
6、根据所述点云信息对各所述目标进行目标监测。
7、可选地,所述根据采集到的环境图像信息确定目标车辆行驶环境中的目标之前,包括:
8、对目标车辆的行驶环境进行图像采集,获得原始环境图像;
9、对所述原始环境图像进行特征提取,获得环境特征图像;
10、对所述环境特征图像进行图像识别,获得所述行驶环境的环境图像信息。
11、可选地,所述对所述原始环境图像进行特征提取,获得环境特征图像,包括:
12、获取所述原始环境图像的像素信息;
13、根据所述像素信息构建所述原始环境图像的特征矩阵;
14、将所述原始环境图像导入至所述特征矩阵进行特征提取,获得环境特征图像。
15、可选地,所述根据所述点云信息对各所述目标进行目标监测,包括:
16、根据所述点云信息构建所述目标车辆对应的三维坐标系;
17、根据所述三维坐标系确定各所述目标对应的坐标信息;
18、根据所述坐标信息对各所述目标进行目标监测。
19、可选地,所述根据所述三维坐标系确定各所述目标对应的坐标信息,包括:
20、根据所述点云信息在所述三维坐标系中构建各所述目标对应的三维体素栅格;
21、确定各所述三维体素栅格的重心信息;
22、根据所述重心信息对各三维体素栅格进行替换,获得各目标在所述三维坐标系中的重心点;
23、根据所述重心点确定各目标对应的坐标信息。
24、可选地,所述根据所述点云信息在所述三维坐标系中构建各所述目标对应的三维体素栅格,包括:
25、基于所述环境特征图像在所述三维坐标系中构建各所述目标对应的目标边界框;
26、对所述点云信息进行下采样处理,根据处理结果基于所述目标边界框在所述三维坐标系中构建各目标对应的三维体素栅格。
27、可选地,所述根据所述坐标信息对各所述目标进行目标监测,包括:
28、根据所述点云信息确定各所述目标的深度信息;
29、根据所述深度信息确定各目标的深度均值;
30、根据所述深度均值对各目标进行筛选,确定各目标中的有效目标,所述有效目标包括行人;
31、对各所述有效目标进行目标监测。
32、此外,为实现上述目的,本发明还提出一种目标监测装置,所述目标监测装置包括:
33、目标选取模块,用于根据采集到的环境图像信息确定目标车辆行驶环境中的目标;
34、区域选取模块,用于根据所述目标确定待采集区域,并根据所述待采集区域确定采集雷达;
35、雷达采集模块,用于控制所述采集雷达对所述待采集区域进行信息采集,获得所述待采集区域的点云信息;
36、目标监测模块,用于根据所述点云信息对各所述目标进行目标监测。
37、此外,为实现上述目的,本发明还提出一种目标监测设备,所述目标监测设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的目标监测程序,所述目标监测程序配置为实现如上文所述的目标监测方法的步骤。
38、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有目标监测程序,所述目标监测程序被处理器执行时实现如上文所述的目标监测方法的步骤。
39、本发明根据采集到的环境图像信息确定目标车辆行驶环境中的目标,根据所述目标确定待采集区域,并根据所述待采集区域确定采集雷达,控制所述采集雷达对所述待采集区域进行信息采集,获得所述待采集区域的点云信息,根据所述点云信息对各所述目标进行目标监测;由于本发明通过对目标车辆行驶环境进行图像采集,根据采集到的环境图像信息确定了行驶环境中需要进行监测的目标,实现了对目标的预先标定,根据目标确定需要进行信息采集的采集雷达,从而确保了雷达采集方向的精准性,控制采集雷达对目标所在的待采集区域进行信息采集,获得所述待采集区域的点云信息,从而确保了雷达采集方向的精准性,根据采集到的点云信息对目标进行目标监测,实现了对行驶环境中存在的目标进行准确地感知,提升了目标的监测效率,降低了行驶安全隐患。
技术特征:
1.一种目标监测方法,其特征在于,所述目标监测方法包括:
2.如权利要求1所述的目标监测方法,其特征在于,所述根据采集到的环境图像信息确定目标车辆行驶环境中的目标之前,包括:
3.如权利要求2所述的目标监测方法,其特征在于,所述对所述原始环境图像进行特征提取,获得环境特征图像,包括:
4.如权利要求1至3中任一项所述的目标监测方法,其特征在于,所述根据所述点云信息对各所述目标进行目标监测,包括:
5.如权利要求4所述的目标监测方法,其特征在于,所述根据所述三维坐标系确定各所述目标对应的坐标信息,包括:
6.如权利要求5所述的目标监测方法,其特征在于,所述根据所述点云信息在所述三维坐标系中构建各所述目标对应的三维体素栅格,包括:
7.如权利要求6所述的目标监测方法,其特征在于,所述根据所述坐标信息对各所述目标进行目标监测,包括:
8.一种目标监测装置,其特征在于,所述目标监测装置包括:
9.一种目标监测设备,其特征在于,所述目标监测设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的目标监测程序,所述目标监测程序配置为实现如权利要求1至7中任一项所述的目标监测方法。
10.一种存储介质,其特征在于,所述存储介质上存储有目标监测程序,所述目标监测程序被处理器执行时实现如权利要求1至7任一项所述的目标监测方法。
技术总结
本发明公开了一种目标监测方法、装置、设备及存储介质。本发明公开了:根据采集到的环境图像信息确定目标车辆行驶环境中的目标,根据目标确定待采集区域,并根据待采集区域确定采集雷达,控制采集雷达对待采集区域进行信息采集,获得待采集区域的点云信息,根据点云信息对各目标进行目标监测;由于本发明通过对目标车辆行驶环境进行图像采集,从而确定了行驶环境中需要监测的目标,根据目标确定需要进行信息采集的采集雷达,控制采集雷达对目标所在的待采集区域进行信息采集,从而确保了雷达采集方向的精准性,根据采集到的点云信息对目标进行目标监测,实现了对行驶环境中存在的目标进行准确地感知,提升了目标的监测效率,降低了行驶安全隐患。
技术研发人员:熊禹,袁恒,玉雄侯,全健贤,梁翠玲,罗海英
受保护的技术使用者:东风柳州汽车有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!