一种部署于主控的赛车电池SOC估计方法、装置及介质
本发明涉及电池soc,尤其涉及一种部署于主控的赛车电池soc估计方法、装置及介质。
背景技术:
1、中国大学生方程式汽车大赛中的参赛赛车按照动力来源可分为燃油动力与电动力赛车。伴随着新能源汽车领域技术的不断发展,电动力赛车所受的关注度也在逐步提升。主控(electric control unit,ecu)作为车辆的神经中枢,可实现数据转发交互及计算的功能。simulink作为matlab中的一种可视化仿真工具,以模块图环境作为基础,支持系统设计、仿真环境搭建以及仿真数据流可视化,便于实现代码的测试与离线验证。在大赛中,大部分车队采用华海rapidecu,支持simulink图形化编程与烧入,具有学习成本低、自定义程度高及算法部署简单的特点。
2、电池作为电动力赛车动力的来源,对高压电池的荷电状态(state of charge,soc)进行较高精度的估计,对于反映电池状态及车队制定比赛策略而言都具有重要意义。电池soc估计算法一般部署于bms内,但是国内赛事中大部分车队对bms研究较浅,只能使用成品级的bms,对bms中的soc估计算法难以实现修改与优化,仅有少部分车队实现了自制电池bms。因此,虽然搭建soc估计算法的成本较低,但是在电池bms中进行算法部署对bms的自制化程度具有较高要求,需要较高的研究设计成本,大多数车队难以实现。除此之外,常见的算法模块化程度较低,对于参赛人员而言,从搭建、验证仿真到嵌入整体算法框架的过程较为复杂,亦提高了算法的研发成本。
3、常见的soc估计算法有安时积分法、开路电压法、神经网络法及扩展卡尔曼滤波法。安时积分法结构较为简单,代码实现难度较低,仅需采集电池放电电流即可完成估计,但是作为一种开环的积分算法,易受soc初始误差、电流采集噪声以及误差累积的影响,造成soc估计精度的下降;开路电压法是构建电池soc与电池端电压之间的映射关系,通过采集端电压来估计soc,使用时需要进行一段时间的静置来获取准确的开路电压,因此实用性较差;神经网络法则需要大量的数据进行模型的训练,成本较高,实用性较差;扩展卡尔曼滤波是目前soc估计算法中使用较多的一种算法,适用于估计非线性系统,能够消除初始的soc误差,并对传感器采集的噪声具有一定的抑制作用,但作为一种基于模型的算法,对电池模型的参数辨识具有一定要求,而电池的模型参数会随着电池soc变化而变化,为算法引入误差。
技术实现思路
1、为至少一定程度上解决现有技术中存在的技术问题之一,本发明的目的在于提供一种部署于主控的赛车电池soc估计方法、装置及介质。
2、本发明所采用的技术方案是:
3、一种部署于主控的赛车电池soc估计方法,包括以下步骤:
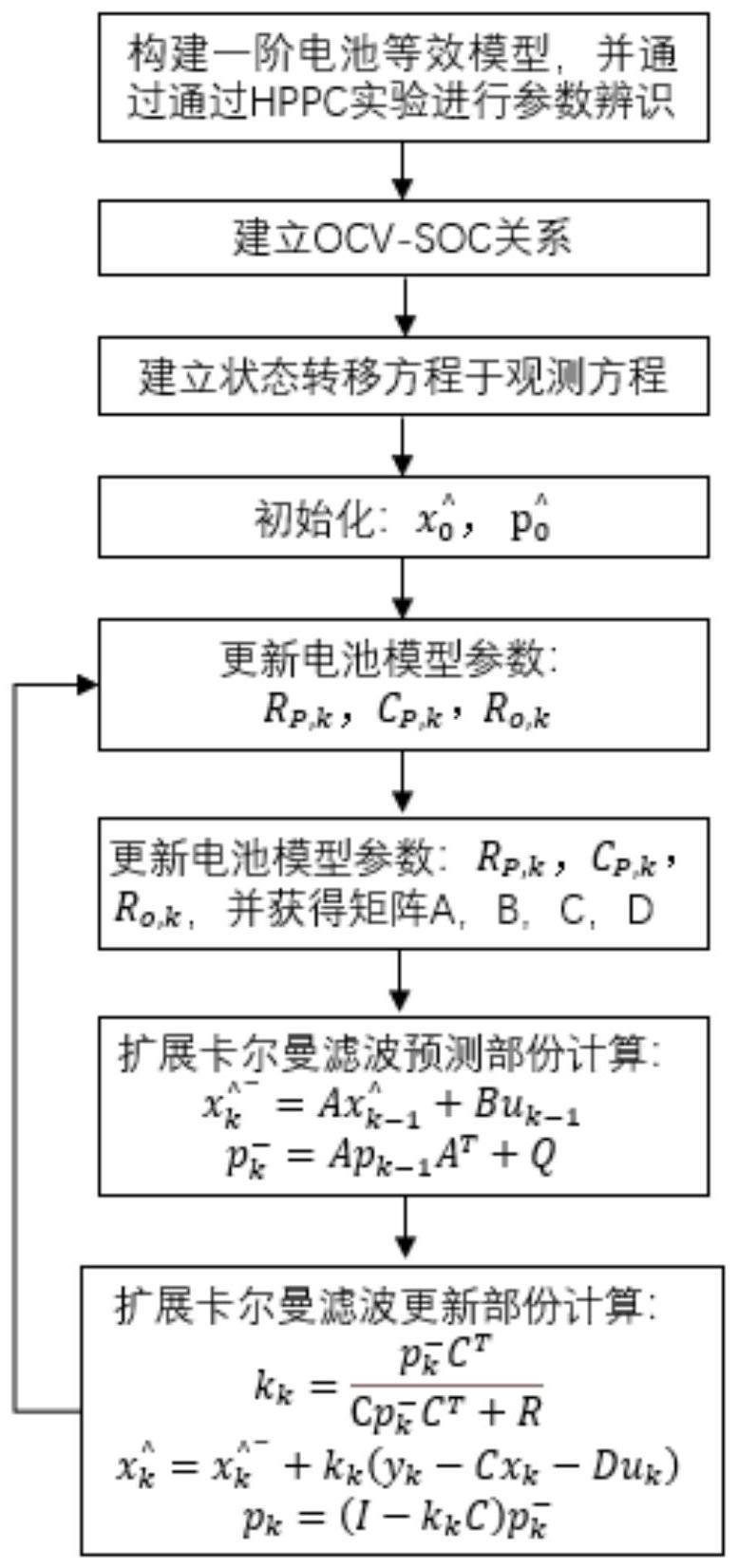
4、建立电池各soc阶段一阶电路等效模型,并进行各soc阶段电池参数辨识,获得soc与电池参数的对应关系;
5、获取开路电压ocv与soc的关系,得到ocv-soc曲线及方程;
6、根据各soc阶段电池模型参数,建立系统状态转移方程与观测方程;
7、在simulink中构建扩展卡尔曼滤波算法,并进行算法仿真;
8、将仿真后的算法烧入车辆的主控进行滤波。
9、进一步地,所述建立系统状态转移方程与观测方程,包括:
10、设系统的状态转移方程与观测方程如下:
11、xk=f(xk-1,uk-1,w)
12、zk=h(xk-1,v)
13、式中,k表示第k时刻,xk表示k时刻系统状态量,xk=[sock,up,k]t,up,k为k时刻的极化电压;uk表示k时刻控制量;w为过程噪声,v为测量噪声;f()为状态转移函数,h()为观测函数;
14、安时积分方程的表达式为:
15、
16、式中,socj与socj-1分别为k时刻及k-1时刻的soc值,cb为电池容量,δt为采样时间,i为放电电流;
17、结合安时积分方程、状态转移方程与观测方程:
18、
19、式中,w1k与w2k为系统对应于soc及up的噪声;vk为观测噪声;rp,k-1、cp,k-1分别为k-1时刻电池的极化内阻与极化电容;ro,k为k时刻电池对应的内阻;ub,k为电池的电动势。
20、进一步地,所述在simulink中构建扩展卡尔曼滤波算法,包括:
21、已知电池电动势ub,k与sock存在以下非线性对应关系:
22、ub,k=f(sock)
23、将观测方程对先验状态值进行泰勒展开得:
24、
25、将状态方程与观测方程写成如下形式:
26、
27、式中,q为过程噪声对应的协方差矩阵,r为测量噪声对应的协方差矩阵;
28、其中有:
29、
30、
31、根据拓展卡尔曼滤波的预测及更新环节,其计算流程如下:
32、
33、其中,与pk-1是k-1时刻的状态后验状态值与后验协方差矩阵;与为k时刻的先验状态值与先验协方差矩阵;kk为卡尔曼增益;yk为电池端电压;
34、得到计算流程后,通过simulink模块进行电池soc估计算法的搭建。
35、进一步地,所述通过simulink模块进行电池soc估计算法的搭建,包括:
36、利用matrixmultiply构建矩阵乘法计算,并将状态预测、状态更新、协方差预测及协方差更新封装成四个子系统;
37、考虑到卡尔曼滤波算法当前时刻的输入包含上一时刻算法输出,为闭环算法,因此采用delay模块作为算法输出结果的寄存器,以存储系统上一时刻输出值,从而实现算法闭环;考虑到部署于主控后,算法运行频率与电流电压传感器采集频率不同,采用ratetransition模块进行传感器信号采集预处理,以保证输入信号频率与算法运行频率的一致。
38、进一步地,所述主控具有接收电池bms发出的电池放电电流、端电压报文的能力,将soc估计算法部署于车辆的主控中,而非bms。
39、进一步地,所述获取开路电压ocv与soc的关系,得到ocv-soc曲线及方程,包括:
40、通过每次放电预设电量,并静置一段时间,获取电池各个soc值之间与ocv的对应关系,并使用五次曲线进行拟合,得到ocv-soc曲线及方程。
41、进一步地,所述获得soc与电池参数的对应关系,包括:
42、通过插值的方式获得soc与电池参数的对应关系。
43、进一步地,所建立的一阶电路等效模型的表达式如下:
44、
45、其中uo为电池端电压,ub为电池开路电压,up为极化电压,ro为欧姆内阻,rp与cp为极化电阻与极化电容,i为放电电流。
46、进一步地,所述进行各soc阶段电池参数辨识,包括:
47、通过电池混合脉冲功率特性实验,对一阶电路等效模型的各个参数进行辨识;
48、当电池混合脉冲功率特性实验中电池soc每下降预设数值时,对电池进行一次参数辨识;
49、根据电池端电压、极化电压以及静置后电压稳定所需的时间,识别出电池的欧姆内阻、极化内阻与极化电容;
50、从soc为100%至0%,获得soc每变化预设数值所对应的电池参数值,进行插值后,最终获得电池参数与soc的对应关系。
51、本发明所采用的另一技术方案是:
52、一种部署于主控的赛车电池soc估计装置,包括:
53、至少一个处理器;
54、至少一个存储器,用于存储至少一个程序;
55、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上所述方法。
56、本发明所采用的另一技术方案是:
57、一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行如上所述方法。
58、本发明的有益效果是:本发明结合算法的模块化特点,将算法部署在主控中,部署过程简单,减少了算法部署对bms硬件环境的依赖,降低了soc算法部署的技术成本。
59、另外,对电池各soc阶段的等效模型进行了建模,结合适用于非线性系统的扩展卡尔曼滤波算法,减少了随电池soc变化而变化的模型参数误差与状态初始值误差的影响;同时,对传感器噪声具有一定滤除作用,提高了soc估计的精度。除此之外,借助simulink图形化编程,算法的可读性有所提高,且便于进行算法的离线仿真与调试。
- 还没有人留言评论。精彩留言会获得点赞!