一种面向复杂环境低成本的PPP随机模型自适应调整方法
本发明涉及卫星导航,尤其涉及一种面向复杂环境低成本的ppp随机模型自适应调整方法。
背景技术:
1、gnss信号在传播过程中面临着多种模型化与非模型化误差的严重影响。卫星轨道、钟差、差分码偏差、电离层、对流层等模型化误差,可以通过观测域差分或状态域改正的方式较好地消除。然而,非模型化误差如测量噪声、多路径、射频干扰等通常没有统一的修正模型,对gnss定位性能的影响变得越来越严重。尤其是随着现代化建设的不断发展,城市环境变得越来越复杂。各种建筑物对gnss信号的遮挡与反射、不同无线网络设施产生的射频干扰以及低成本终端较差的抗多径干扰能力,都使得在复杂环境中实现精准可靠定位面临着极大的挑战。而影响定位精度与可靠性的重要因素是如何合理地分配多系统、多频率gnss观测值的权重。
2、传统的gnss观测值加权模型通常采用等权模型或高度角定权模型。等权模型认为所有卫星导航系统、所有频率的观测值测距精度相等,然而该模型在大部分现实环境中均不适用。高度角定权模型认为gnss观测值的测量误差主要与卫星的高度相关,对高度角较高的卫星分配较大的权重,而对高度角较低的卫星进行降权。该模型广泛应用于国际上一些知名的gnss数据处理软件如bernese、panda、gamit等,并在开阔的环境中实现了较好的定位结果,但在建筑物、树木严重遮挡的城市复杂环境中效果不佳。因此,设计一种合理的多系统、多频率gnss观测值加权模型,自适应地调整伪距、载波相位的观测值权重,是提升城市复杂环境下低成本终端ppp收敛速度与定位精度的关键因素。
技术实现思路
1、提供了本发明以解决现有技术中存在的上述问题。因此,需要一种面向复杂环境低成本的ppp随机模型自适应调整方法、装置及介质,可以在城市复杂环境中显著改善低成本导航终端的抗粗差能力,有效提升ppp的收敛速度与定位精度。
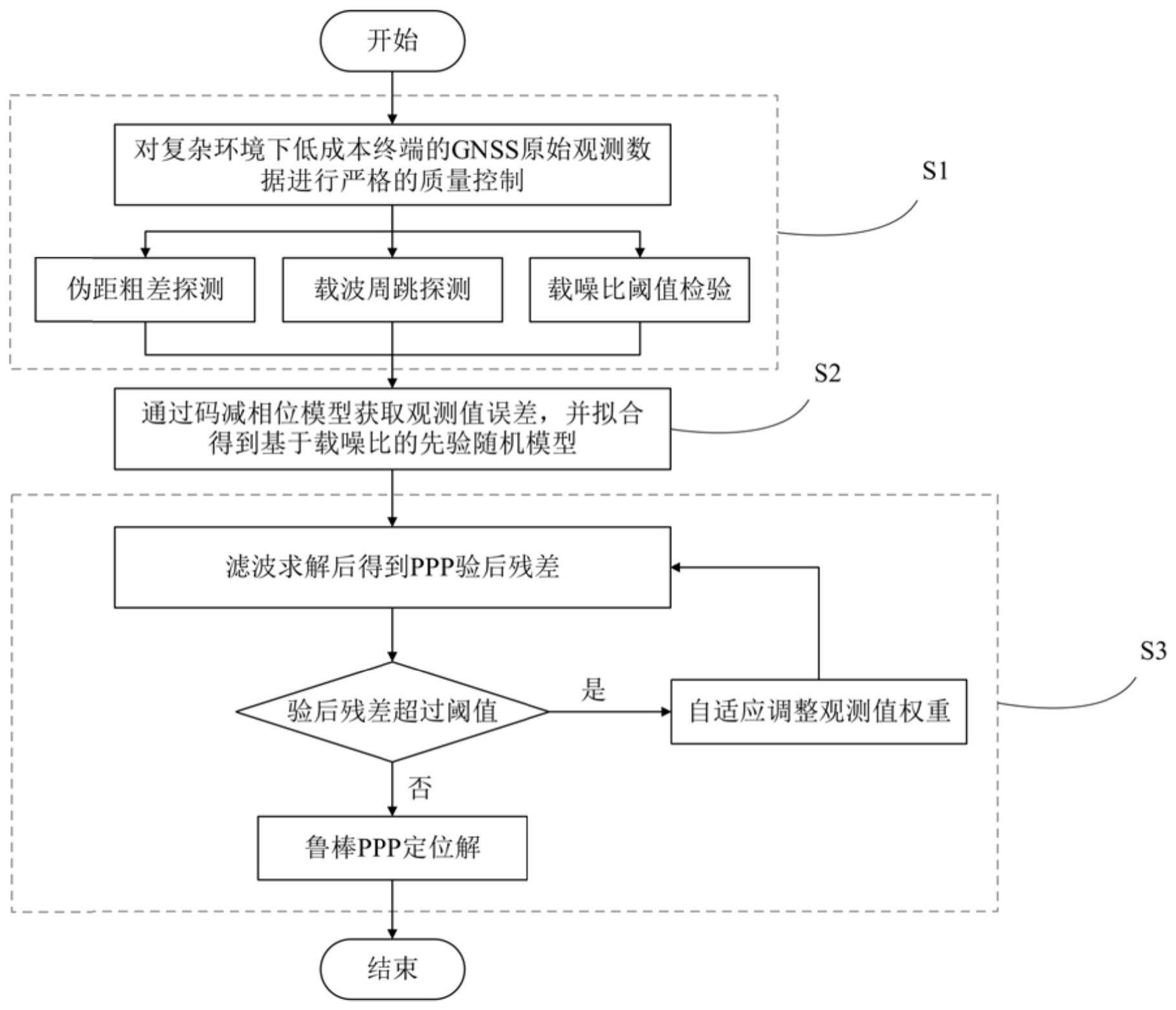
2、根据本发明的第一方案,提供了一种面向复杂环境低成本的ppp随机模型自适应调整方法,所述方法包括:
3、根据质量控制参数,对复杂环境下低成本终端的gnss原始观测数据进行质量控制,以得到gnss观测值,所述质量控制参数包括伪距粗差探测、载波周跳探测及载波比阈值检验;
4、通过码减相位模型获取观测值误差,并根据所述观测值误差与载噪比的相关性拟合得到基于载噪比的先验随机模型;
5、通过滤波求解得到ppp验后残差,并根据残差阈值检验自适应地调整伪距、载波相位观测值的权重以获得定位结果。
6、进一步地,所述根据质量控制参数,对复杂环境下低成本终端的gnss原始观测数据进行质量控制,以得到gnss观测值,具体包括:
7、根据历元间伪距与多普勒的关系,构建如下的伪距粗差探测模型:
8、gp=(pk-pk-1)-(dk+dk-1)·λ/2,k≥2 (33)
9、其中,pk和pk-1分别表示第k和k-1历元的伪距观测值,dk和dk-1分别表示第k和k-1历元的多普勒频移观测值,gp为伪距粗差检验量,根据方差-协方差误差传播准则,如果|gp|>3σp,则认为当前伪距观测值存在粗差,此时降低该伪距观测值权重或剔除该观测值,σp表示伪距测量误差的中误差;
10、通过高精度多普勒构建如下的载波相位整周模糊度检验式:
11、
12、其中,δn表示载波相位整周模糊度在第k和k-1历元的变化量,表示载波相位观测值的噪声,εd表示多普勒观测值的噪声;
13、高精度多普勒检测载波相位周跳的阈值设置如下:
14、
15、其中,ξ表示载波相位周跳探测的阈值;当观测值采样间隔为1秒时ξ设置为1周,通过高精度多普勒可探测出一周以上的周跳;
16、构建载噪比阈值检验式sobs以直接剔除观测质量较差的卫星信号:
17、
18、其中,c/n0表示接收卫星信号的载波比,ele表示卫星的高度角;如果卫星的高度角大于15°且载噪比大于30db-hz认为当前观测值有效,而不在有效范围内的观测数据表示该卫星信号无法有效跟踪而被剔除。
19、进一步地,所述通过码减相位模型获取观测值误差,并根据所述观测值误差与载噪比的相关性拟合得到基于载噪比的先验随机模型,具体包括:
20、通过gnss基本观测方程构建码减相位模型从而获取伪距测量误差;
21、从卫星信号发射到接收过程中gnss传播路径上的基本观测方程如下:
22、
23、其中,ρ表示卫地距,c表示真空中的光速,dt表示接收机钟差,dt表示卫星钟差,i表示斜路径的电离层延迟,t表示斜路径的对流层延迟,λ表示卫星发射信号的载波频率,n表示载波相位的整周模糊度,mp表示伪距多路径误差,表示载波相位的多路径误差,εp表示伪距测量噪声,表示伪距测量噪声;
24、根据式(5)得到码减相位模型(cmc,code-minus-carrier phase)的表达式:
25、
26、通过连续弧段内取均值的方式得到码减相位残差:
27、
28、根据伪距测量误差与载噪比的相关性拟合得到基于载噪比的先验随机模型;所述基于载噪比的先验随机模型表达式如下:
29、
30、其中,和的经验值为0.1~0.3和0.001~0.003;v和c为载噪比随机模型的待拟合系数,根据伪距测量误差cmcr与c/n0的相关性进行标定,待拟合的函数表达式为:
31、
32、其中,cmcr与c/n0均由实际的测量数据获得,v和c为待拟合参数;为了使得基于载噪比的随机模型系数v和c尽可能符合低成本终端gnss观测数据质量,在拟合过程中基于残差平方和最小准则搜索最佳的拟合系数;
33、将式(9)的两边取对数,可得到下式的目标函数e2:
34、
35、其中,k和n分别代表第k个测量值与测量值总数,当目标函数e2最小时得到v和c的最优拟合参数。
36、进一步地,所述通过滤波求解得到ppp验后残差,并根据残差阈值检验自适应地调整伪距、载波相位观测值的权重以获得定位结果,具体包括:
37、通过先验随机模型为观测值赋予初始权重,滤波求解后得到ppp验后残差;
38、将gnss基本观测方程(5)线性化后得到第k历元观测向量的误差方程:
39、
40、其中,bk表示设计矩阵,表示待估参数向量,lk表示观测值减计算值向量,vk表示滤波求解得到的验后残差向量。根据加权最小二乘原理求解式(11)可得:
41、
42、式中,pk是由式(8)计算得到的先验权矩阵(对角阵,对角线元素为pkk,k=1,2,…n):
43、
44、式中,n表示观测值总数,观测值的方差越大,表明测量数据包含更多随机误差,相应的观测值权重越小;
45、根据残差阈值检验自适应地调整伪距、载波相位观测值的权重以获得更加鲁棒的定位结果;
46、为实现自适应调整伪距、载波相位观测值权重,引入权因子w进行权重控制:
47、
48、式中,表示等价权矩阵(对角线元素为);顾及式(12)-(14)得自适应抗差估计:
49、
50、将验后残差vk归一化为并构造分段函数以自适应调整权因子:
51、
52、其中,c0与c1表示归一化残差的下界与上界;对于低成本gnss导航终端两个系数的经验值为:c0=1.0~1.5,c1=2.5~5.0。
53、根据本发明的第二方案,提供了一种面向复杂环境低成本的ppp随机模型自适应调整装置,所述装置包括:
54、质量控制单元,其被配置为根据质量控制参数,对复杂环境下低成本终端的gnss原始观测数据进行质量控制,以得到gnss观测值,所述质量控制参数包括伪距粗差探测、载波周跳探测及载波比阈值检验;
55、先验随机模型构建单元,其被配置为通过码减相位模型获取观测值误差,并根据所述观测值误差与载噪比的相关性拟合得到基于载噪比的先验随机模型;
56、定位结果计算单元,其被配置为通过滤波求解得到ppp验后残差,并根据残差阈值检验自适应地调整伪距、载波相位观测值的权重以获得定位结果。
57、进一步地,所述质量控制单元被进一步被配置为:
58、根据历元间伪距与多普勒的关系,构建如下的伪距粗差探测模型:
59、gp=(pk-pk-1)-(dk+dk-1)·λ/2,k≥2 (49)
60、其中,pk和pk-1分别表示第k和k-1历元的伪距观测值,dk和dk-1分别表示第k和k-1历元的多普勒频移观测值,gp为伪距粗差检验量,根据方差-协方差误差传播准则,如果|gp|>3σp,则认为当前伪距观测值存在粗差,此时降低该伪距观测值权重或剔除该观测值,σp表示伪距测量误差的中误差;
61、通过高精度多普勒构建如下的载波相位整周模糊度检验式:
62、
63、其中,δn表示载波相位整周模糊度在第k和k-1历元的变化量,表示载波相位观测值的噪声,εd表示多普勒观测值的噪声;
64、高精度多普勒检测载波相位周跳的阈值设置如下:
65、
66、其中,ξ表示载波相位周跳探测的阈值;当观测值采样间隔为1秒时ξ设置为1周,通过高精度多普勒可探测出一周以上的周跳;
67、构建载噪比阈值检验式sobs以直接剔除观测质量较差的卫星信号:
68、
69、其中,c/n0表示接收卫星信号的载波比,ele表示卫星的高度角;如果卫星的高度角大于15°且载噪比大于30db-hz认为当前观测值有效,而不在有效范围内的观测数据表示该卫星信号无法有效跟踪而被剔除。
70、进一步地,所述先验随机模型构建单元被进一步配置为:
71、通过gnss基本观测方程构建码减相位模型从而获取伪距测量误差;
72、从卫星信号发射到接收过程中gnss传播路径上的基本观测方程如下:
73、
74、其中,ρ表示卫地距,c表示真空中的光速,dt表示接收机钟差,dt表示卫星钟差,i表示斜路径的电离层延迟,t表示斜路径的对流层延迟,λ表示卫星发射信号的载波频率,n表示载波相位的整周模糊度,mp表示伪距多路径误差,表示载波相位的多路径误差,εp表示伪距测量噪声,表示伪距测量噪声;
75、根据式(5)得到码减相位模型(cmc,code-minus-carrier phase)的表达式:
76、
77、通过连续弧段内取均值的方式得到码减相位残差:
78、
79、根据伪距测量误差与载噪比的相关性拟合得到基于载噪比的先验随机模型;所述基于载噪比的先验随机模型表达式如下:
80、
81、其中,和的经验值为0.1~0.3和0.001~0.003;v和c为载噪比随机模型的待拟合系数,根据伪距测量误差cmcr与c/n0的相关性进行标定,待拟合的函数表达式为:
82、
83、其中,cmcr与c/n0均由实际的测量数据获得,v和c为待拟合参数;为了使得基于载噪比的随机模型系数v和c尽可能符合低成本终端gnss观测数据质量,在拟合过程中基于残差平方和最小准则搜索最佳的拟合系数;
84、将式(9)的两边取对数,可得到下式的目标函数e2:
85、
86、其中,k和n分别代表第k个测量值与测量值总数,当目标函数e2最小时得到v和c的最优拟合参数。
87、进一步地,所述定位结果计算单元被进一步配置为:
88、通过先验随机模型为观测值赋予初始权重,滤波求解后得到ppp验后残差;
89、将gnss基本观测方程(5)线性化后得到第k历元观测向量的误差方程:
90、
91、其中,bk表示设计矩阵,表示待估参数向量,lk表示观测值减计算值向量,vk表示滤波求解得到的验后残差向量。根据加权最小二乘原理求解式(11)可得:
92、
93、式中,pk是由式(8)计算得到的先验权矩阵(对角阵,对角线元素为pkk,k=1,2,…n):
94、
95、式中,n表示观测值总数,观测值的方差越大,表明测量数据包含更多随机误差,相应的观测值权重越小;
96、根据残差阈值检验自适应地调整伪距、载波相位观测值的权重以获得更加鲁棒的定位结果;
97、为实现自适应调整伪距、载波相位观测值权重,引入权因子w进行权重控制:
98、
99、式中,表示等价权矩阵(对角线元素为);顾及式(12)-(14)得自适应抗差估计:
100、
101、将验后残差vk归一化为并构造分段函数以自适应调整权因子:
102、
103、其中,c0与c1表示归一化残差的下界与上界;对于低成本gnss导航终端两个系数的经验值为:c0=1.0~1.5,c1=2.5~5.0。
104、根据本发明的第三方案,提供了一种存储有指令的非暂时性计算机可读存储介质,当所述指令由处理器执行时,执行根据本发明各个实施例所述的方法。
105、根据本发明各个方案的面向复杂环境低成本的ppp随机模型自适应调整方法,其至少具有以下技术效果:
106、本发明充分利用了多系统、多频率gnss观测值测量误差的相关性,基于码减相位模型构造了载噪比先验权随机模型,更加符合低成本导航终端在城市环境中的观测数据质量变化;通过验后残差阈值检验自适应地调整伪距、载波相位的观测值权重,在复杂场景下可显著改善模型的抗粗差能力,有效提升城市复杂环境下低成本终端ppp的定位精度与收敛速度,保障了实时导航服务中定位的精准度与连续性。
- 还没有人留言评论。精彩留言会获得点赞!