盲区滤波参数测试方法、盲区模拟装置、系统及介质与流程
本申请涉及智能驾驶,具体涉及一种盲区滤波参数测试方法、盲区模拟装置、系统及介质。
背景技术:
1、由于车辆装配、覆盖件等差异,在车辆的后保险杠上会产生单一动点的情况。单一动点的情况会导致车辆的角雷达在进行障碍物识别时产生误报警的问题。
2、针对上述问题,通常是通过大量车辆进行随机路试,采集大量里程累积,采集长时间无目标物、道路两侧反射物体体征相同的道路场景,以进行测试,但是由于后保险杠反射回的单一动点信号随机性强,不可控,会造成测试效率低的问题。并且,并非每台车辆都存在单一动点的情况,因此,测试过程不可控,无法合理且有效的解决上述误报警的问题。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本申请旨在提供一种盲区滤波参数测试方法、盲区模拟装置、系统及介质,以解决由于车辆的后保险杠有概率产生单一动点反射,导致的角雷达误报警的问题,以及使用众多车辆测试来确定误报警问题而造成的测试效率低的问题。
2、本申请实施例提供了一种盲区滤波参数测试方法,应用于测试车辆,所述测试车辆的顶部安装有盲区模拟装置,所述盲区模拟装置,包括:两个反三角锥桶,各所述反三角锥桶分别朝向所述测试车辆的角雷达设备;所述方法包括:
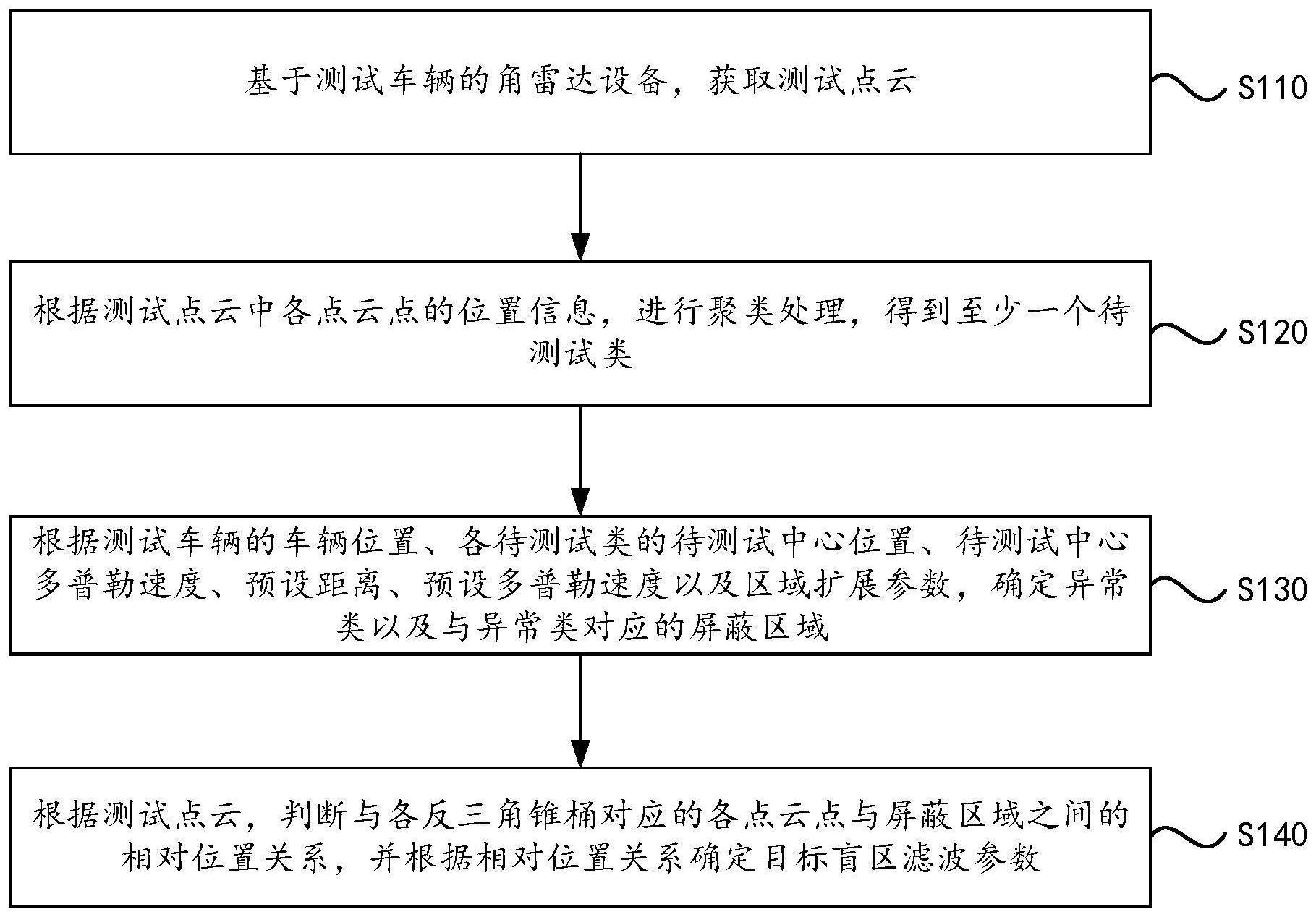
3、基于所述测试车辆的角雷达设备,获取测试点云;
4、根据所述测试点云中各点云点的位置信息,进行聚类处理,得到至少一个待测试类;
5、根据所述测试车辆的车辆位置、各所述待测试类的待测试中心位置、待测试中心多普勒速度、预设距离、预设多普勒速度以及区域扩展参数,确定异常类以及与所述异常类对应的屏蔽区域;
6、根据所述测试点云,判断与各所述反三角锥桶对应的各点云点与所述屏蔽区域之间的相对位置关系,并根据所述相对位置关系确定目标盲区滤波参数;其中,所述目标盲区滤波参数包括所述预设距离、所述预设多普勒速度以及所述区域扩展参数中的至少一种。
7、可选的,所述根据所述测试车辆的车辆位置、各所述待测试类的待测试中心位置、待测试中心多普勒速度、预设距离、预设多普勒速度以及区域扩展参数,确定异常类以及与所述异常类对应的屏蔽区域,包括:
8、根据所述测试车辆的车辆位置、各所述待测试类的待测试中心位置、待测试中心多普勒速度、预设距离以及预设多普勒速度,确定异常类,并将所述异常类中的各点云点作为异常点;
9、根据所述异常点以及区域扩展参数,确定与所述异常点对应的屏蔽子区域;
10、根据各屏蔽子区域,确定与所述异常类对应的屏蔽区域。
11、可选的,所述根据所述测试车辆的车辆位置、各所述待测试类的待测试中心位置、待测试中心多普勒速度、预设距离以及预设多普勒速度,确定异常类,包括:
12、针对每个所述待测试类,在所述测试车辆的车辆位置与所述待测试类的待测试中心位置之间的待测试距离小于预设距离,并且,所述待测试中心多普勒速度小于预设多普勒速度的情况下,将所述待测试类作为标记类;
13、针对每个所述标记类,通过滑动窗口对所述标记类进行划分,确定第一数量的窗口点云集合,若所述窗口点云集合中各点云点的多普勒速度均为零,则将所述窗口点云集合作为异常集合;
14、在所述标记类对应的异常集合的数量不小于第二数量的情况下,确定所述标记类为异常类;
15、相应的,所述目标盲区滤波参数还包括所述第一数量和所述第二数量中的至少一种。
16、可选的,所述区域扩展参数包括区域形状以及区域面积,所述根据所述异常点以及区域扩展参数,确定与所述异常点对应的屏蔽子区域,包括:
17、针对每个所述异常点,根据所述区域形状以及所述区域面积,确定与所述异常点对应的屏蔽子区域。
18、可选的,所述根据所述相对位置关系确定目标盲区滤波参数,包括:
19、若所述相对位置关系为与各所述反三角锥桶对应的各点云点均落入所述屏蔽区域内,则将当前盲区滤波参数确定为目标盲区滤波参数;
20、否则,对所述当前盲区滤波参数进行调整,并返回执行基于所述测试车辆的角雷达设备,获取测试点云的步骤,直至所述相对位置关系为与各所述反三角锥桶对应的各点云点均落入所述屏蔽区域内。
21、本申请实施例还提供了一种盲区模拟装置,安装在测试车辆的顶部,所述装置包括:基座固定杆、旋转基座、两个旋转杆、两个反三角锥固定杆以及两个反三角锥桶;
22、其中,所述基座固定杆安装在所述测试车辆的顶部,所述旋转基座安装在所述基座固定杆上;
23、各所述旋转杆的第一端均安装在所述旋转基座上,各所述旋转杆的第二端分别与一个所述反三角锥固定杆的第一端相连接,各所述旋转杆均与所述测试车辆的顶部所在水平面平行;
24、各所述反三角锥固定杆与所述测试车辆的顶部所在水平面垂直,各所述反三角锥固定杆的第二端与一个所述反三角锥桶的尖端相连接;
25、各所述反三角锥桶为空心结构,各所述反三角锥桶的开口朝向所述测试车辆的角雷达设备。
26、可选的,所述旋转基座包括支撑板以及旋转部件;
27、所述支撑板安装在所述基座固定杆上,所述旋转部件安装在所述支撑板上,所述旋转杆的第一端安装在所述旋转部件中;
28、所述旋转部件,用于使旋转杆在所述测试车辆的顶部所在水平面内顺时针和/或逆时针旋转。
29、可选的,所述反三角锥固定杆和/或所述旋转杆为伸缩杆;所述反三角锥桶的材料为金属。
30、本申请实施例还提供了一种盲区滤波参数测试系统,所述系统包括:
31、待测试车辆以及如本申请任一实施例所述的盲区模拟装置,所述待测试车辆包括处理器和存储器;
32、所述处理器通过调用所述存储器存储的程序或指令,用于执行如本申请任一实施例所述的盲区滤波参数测试方法的步骤。
33、本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如本申请任一实施例所述的盲区滤波参数测试方法的步骤。
34、综上所述,本申请提出一种盲区滤波参数测试方法,通过盲区模拟装置模拟车辆后保险杆产生的单一动点的情况,通过角雷达设备获取测试点云,根据测试点云中各点云点的位置信息,进行聚类处理得到待测试类,进而,根据测试车辆的车辆位置、各待测试类的待测试中心位置、待测试中心多普勒速度、预设距离、预设多普勒速度以及区域扩展参数,确定异常类以及与异常类对应的屏蔽区域,以用于将屏蔽区域内多普勒速度为零的点云点认为是误报警的点云点,以进行后续屏蔽,根据测试点云,判断与各反三角锥桶对应的各点云点与屏蔽区域之间的相对位置关系,并根据相对位置关系确定目标盲区滤波参数,以判断当前是否能够屏蔽误报警的点云点,实现了模拟单一动点反射情况,提高角雷达误报警的识别效率,且提高测试效率的效果。
技术特征:
1.一种盲区滤波参数测试方法,应用于测试车辆,其特征在于,所述测试车辆的顶部安装有盲区模拟装置,所述盲区模拟装置,包括:两个反三角锥桶,各所述反三角锥桶分别朝向所述测试车辆的角雷达设备;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述测试车辆的车辆位置、各所述待测试类的待测试中心位置、待测试中心多普勒速度、预设距离、预设多普勒速度以及区域扩展参数,确定异常类以及与所述异常类对应的屏蔽区域,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述测试车辆的车辆位置、各所述待测试类的待测试中心位置、待测试中心多普勒速度、预设距离以及预设多普勒速度,确定异常类,包括:
4.根据权利要求2所述的方法,其特征在于,所述区域扩展参数包括区域形状以及区域面积,所述根据所述异常点以及区域扩展参数,确定与所述异常点对应的屏蔽子区域,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述相对位置关系确定目标盲区滤波参数,包括:
6.一种盲区模拟装置,其特征在于,安装在测试车辆的顶部,所述装置包括:基座固定杆、旋转基座、两个旋转杆、两个反三角锥固定杆以及两个反三角锥桶;
7.根据权利要求6所述的装置,其特征在于,所述旋转基座包括支撑板以及旋转部件;
8.根据权利要求6所述的装置,其特征在于,所述反三角锥固定杆和/或所述旋转杆为伸缩杆;所述反三角锥桶的材料为金属。
9.一种盲区滤波参数测试系统,其特征在于,所述系统包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如权利要求1至5任一项所述的盲区滤波参数测试方法的步骤。
技术总结
本申请提供一种盲区滤波参数测试方法、盲区模拟装置、系统及介质,该方法应用于测试车辆,测试车辆的顶部安装有盲区模拟装置,该装置包括:两个反三角锥桶,各反三角锥桶均朝向测试车辆的角雷达设备;该方法包括:基于测试车辆的角雷达设备获取测试点云;根据测试点云中各点云点的位置信息,进行聚类处理得到待测试类;根据测试车辆的车辆位置、待测试中心位置、待测试中心多普勒速度、预设距离、预设多普勒速度和区域扩展参数,确定异常类以及屏蔽区域;根据测试点云判断与各反三角锥桶对应的各点云点与屏蔽区域之间的相对位置关系,进而,确定目标盲区滤波参数。本申请模拟了单一动点反射情况,提高了角雷达误报警的识别效率以及测试效率。
技术研发人员:苏星溢,王佩生,李杨,胡旭,方朕
受保护的技术使用者:重庆赛力斯新能源汽车设计院有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!