融合惯性测量单元尺度信息的轻量级位姿测量方法与流程
本发明属于ar导航,具体涉及融合惯性测量单元尺度信息的轻量级位姿测量方法。
背景技术:
1、在ar领域中,设备会利用多种传感器估计自身在真实空间中的位置和姿态,从使得虚拟内容与真实内容相结合。但在某些特殊的业务场景下(比如ar导航),并不需要位姿估计算法提供高精度位置和姿态信息,也不需要很强的时间连续性,只需要保证位置和偏航角在一定范围内准确即可;
2、而在现有的技术中,大部分都是采用视觉惯导里程计等方式位姿估计,虽然能够实现高精度的输出结果,但需要匹配相应的高端设备进行使用,从而导致出现成本过高、运算过剩等情况;虽然视觉惯导里程计对于相机和惯性测量单元输出的数据质量要求不高,但是对于传感器时间戳、外参以及稳定性是有一定要求的。并且对于某些低端设备来说,普遍存在传感器时间戳无法对齐,甚至错乱,从而导致低端设备无法适用视觉惯性里程计。并且视觉惯导里程计的计算复杂度要比视觉里程计高,所以对ar设备内存和计算力也有一定要求,同时设备还需要将内存和计算力分配给其他模块,使得整个系统的计算资源变得异常紧张。
技术实现思路
1、为了克服现有技术的不足,本发明提供融合惯性测量单元尺度信息的轻量级位姿测量方法,以解决现有技术中的成本过高、低端设备不适用的问题。
2、本发明其中一个实施例提供了一种融合惯性测量单元尺度信息的轻量级位姿测量方法,包括以下步骤:
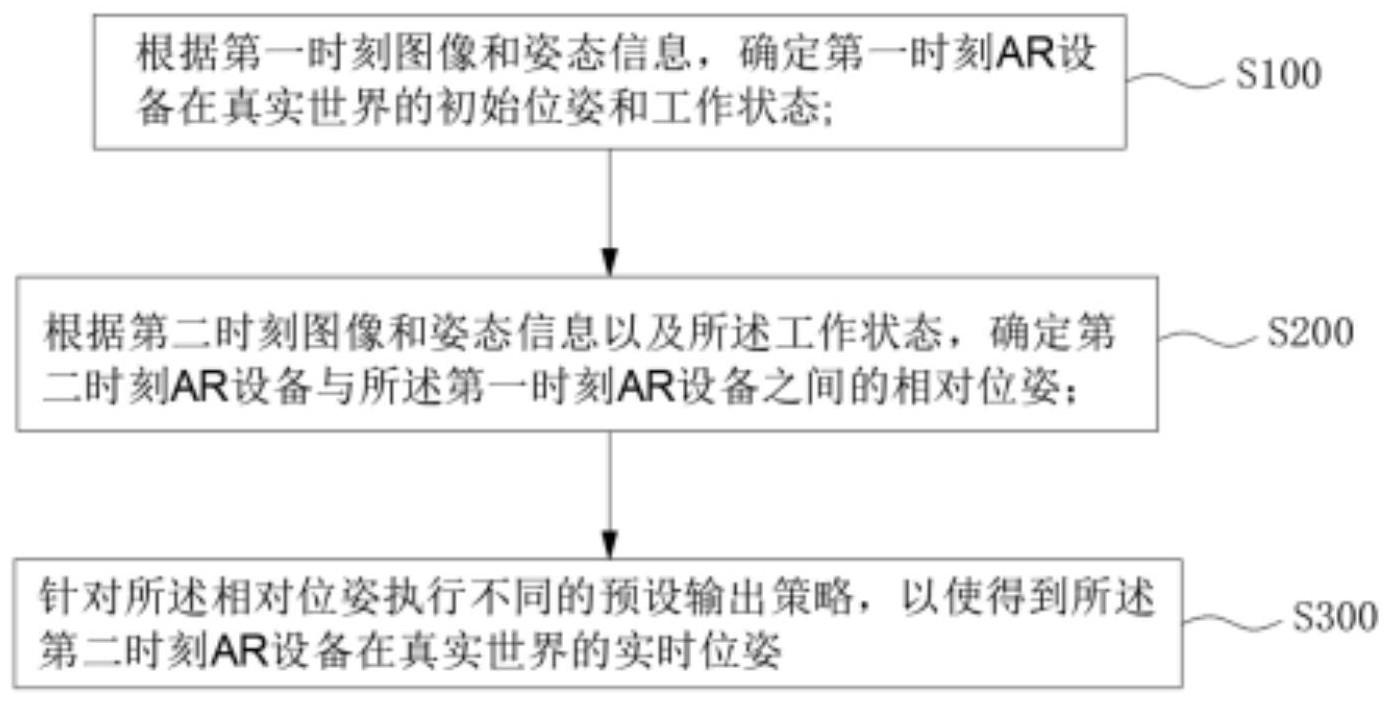
3、根据第一时刻图像和姿态信息,确定第一时刻ar设备在真实世界的初始位姿和工作状态;
4、根据第二时刻图像和姿态信息以及所述工作状态,确定第二时刻ar设备与所述第一时刻ar设备之间的相对位姿;
5、针对所述相对位姿执行不同的预设输出策略,以使得到所述第二时刻ar设备在真实世界的实时位姿。
6、在其中一个实施例中,所述根据第一时刻图像和姿态信息,确定第一时刻ar设备在真实世界的初始位姿和工作状态,包括:
7、获取第一时刻ar设备的姿态信息和预设高度位置,并基于所述姿态信息通过预设算法得到ar设备相对于真实世界的相对姿态,并根据所述预设高度位置和所述相对姿态,确定所述第一时刻ar设备在真实世界的初始位姿;
8、基于所述初始位姿获取所述第一时刻图像;
9、根据所述第一时刻图像的地图点确定所述工作状态。
10、在其中一个实施例中,所述获取第一时刻ar设备的姿态信息和预设高度位置,并基于所述姿态信息通过预设算法得到ar设备相对于真实世界的相对姿态,并根据所述预设高度位置和所述相对姿态,确定所述第一时刻ar设备在真实世界的初始位姿,包括:
11、构建第一坐标系,其中,所述第一坐标系的z轴与真实世界的重力方向反向设置;
12、基于所述第一坐标系获取所述第一时刻ar设备的姿态信息和所述预设高度位置;
13、根据所述预设高度位置和所述相对姿态,生成第二坐标系;
14、其中,所述第一坐标系为真实世界的参照位姿;
15、所述第二坐标系为所述第一时刻ar设备的初始位姿。
16、在其中一个实施例中,所述根据所述第一时刻图像的地图点确定所述工作状态,包括:
17、获取所述第一时刻图像的特征点,生成所述第一时刻图像的地图点;
18、根据预设深度阈值针对所述第一时刻图像的地图点进行判断;
19、根据判断结果确定所述工作状态。
20、在其中一个实施例中,所述根据第二时刻图像和姿态信息以及所述工作状态,确定第二时刻ar设备与所述第一时刻ar设备之间的相对位姿,包括:
21、获取所述第二时刻图像和姿态信息以及所述工作状态;其中,所述工作状态包括初始化状态和跟踪状态;
22、若所述工作状态为初始化状态,根据所述第二时刻图像重新确定所述工作状态;
23、若所述工作状态为跟踪状态,构建目标函数,并输出所述相对位姿。
24、在其中一个实施例中,所述构建目标函数,并输出所述相对位姿,包括:
25、根据所述第二时刻姿态信息与所述第一时刻姿态信息生成初始相对位姿;
26、将第一时刻地图点根据所述初始相对位姿和相机模型重投影到所述第二时刻图像中,得到所述第一时刻地图点在所述第二时刻图像中的特征点位置;
27、针对所述特征点位置与所述第二时刻图像的特征点进行重投影匹配;
28、根据所述重投影匹配的结果构建目标函数,输出最优结果;
29、其中,所述最优结果为所述相对位姿。
30、在其中一个实施例中,所述针对所述相对位姿执行不同的预设输出策略,以使得到所述第二时刻ar设备在真实世界的实时位姿,包括:
31、针对所述相对位姿与预设误差阈值的匹配结果执行第一输出策略,得到所述第二时刻ar设备在真实世界的实时位姿;
32、针对尺度已退化的相对位姿执行第二输出策略,得到所述第二时刻ar设备在真实世界的实时位姿。
33、在其中一个实施例中,所述针对所述相对位姿与预设误差阈值的匹配结果执行第一输出策略,得到所述第二时刻ar设备在真实世界的实时位姿,包括:
34、若所述相对位姿超过所述预设误差阈值,执行赋予策略;
35、若所述相对位姿未超过所述预设误差阈值,执行结合策略。
36、在其中一个实施例中,所述赋予策略,配置为:将所述初始位姿赋予所述第二时刻图像,得到所述第二时刻ar设备在真实世界的实时位姿;
37、和/或,所述结合策略,配置为:将所述相对位姿与所述初始位姿结合,得到所述第二时刻ar设备在真实世界的实时位姿。
38、在其中一个实施例中,所述第二输出策略,包括:
39、根据第二时刻的用户步行速度以及所述第二时刻图片与所述第一时刻图片的时间差,得到用户行走的距离;
40、获取所述相对位姿中的位置信息形成位置向量,并得到位置向量模长;
41、获取所述用户行走的距离与所述位置向量模长之比,得到倍速;
42、根据所述倍速与所述位置向量结合,得到所述第二时刻ar设备在真实世界的实时位置信息;
43、将所述实时位置信息与所述第二时刻姿态信息进行拼接,得到所述第二时刻ar设备在真实世界的实时位姿。
44、以上实施例所提供的融合惯性测量单元尺度信息的轻量级位姿测量方法具有以下有益效果:
45、通过对第一时刻图片和姿态信息进行优化处理,从而高效得到ar设备的初始位姿和工作状态,并基于第一时刻图片和姿态信息确定第二时刻ar设备相对于第一时刻的相对位姿,同时通过针对所述相对位姿执行不同的预设输出策略,得到第二时刻ar设备在真实世界的实时位姿;极大的优化了ar设备实时位姿的计算处理过程,能够高效快速的输出实时位姿结果,避免了繁琐的处理和运算过程,满足ar导航等特殊行业对位置和姿态信息精确度需求不高的场景的需求,且无需很强的时间连续性,保证低端设备能够使用,不仅降低了工作成本,同时能够满足行业需求。
- 还没有人留言评论。精彩留言会获得点赞!