一种矿用机器人的雷达检测机构的制作方法
本发明涉及井下喷浆,特别涉及一种矿用机器人的雷达检测机构。
背景技术:
1、巷道喷浆作业是巷道施工的重要流程,井下巷道喷浆作业环境艰苦,对人的健康损害大。在传统喷浆作业中,需要人工抱持喷管进行喷浆作业力。这种方法劳动强度大,环境恶劣,对人体的健康有很大影响,而且施工质量过于依赖人,存在不稳定性。矿用喷浆机器人代替人工进行喷浆作业,解决了上述问题,在喷浆机器人作业时,要用到雷达检测机构,对巷道表面进行检测。
2、目前没有用于煤矿井下的喷浆机器人,因此,也没有用于矿用喷浆机器人的雷达检测机构。
技术实现思路
1、为了解决现有技术存在的技术问题,本发明提供了一种矿用机器人的雷达检测机构,在喷浆机器人进行喷浆作业前,对煤矿巷道表面进行扫描检测,并将检测结果传递给喷浆机器人控制系统,控制系统根据该结果,控制机器人进行喷浆作业。能够实现自动对巷道表面进行扫描检测,并在检测完成后实现隐藏保护,提高了使用寿命。
2、为了实现上述目的,本发明的技术方案是:
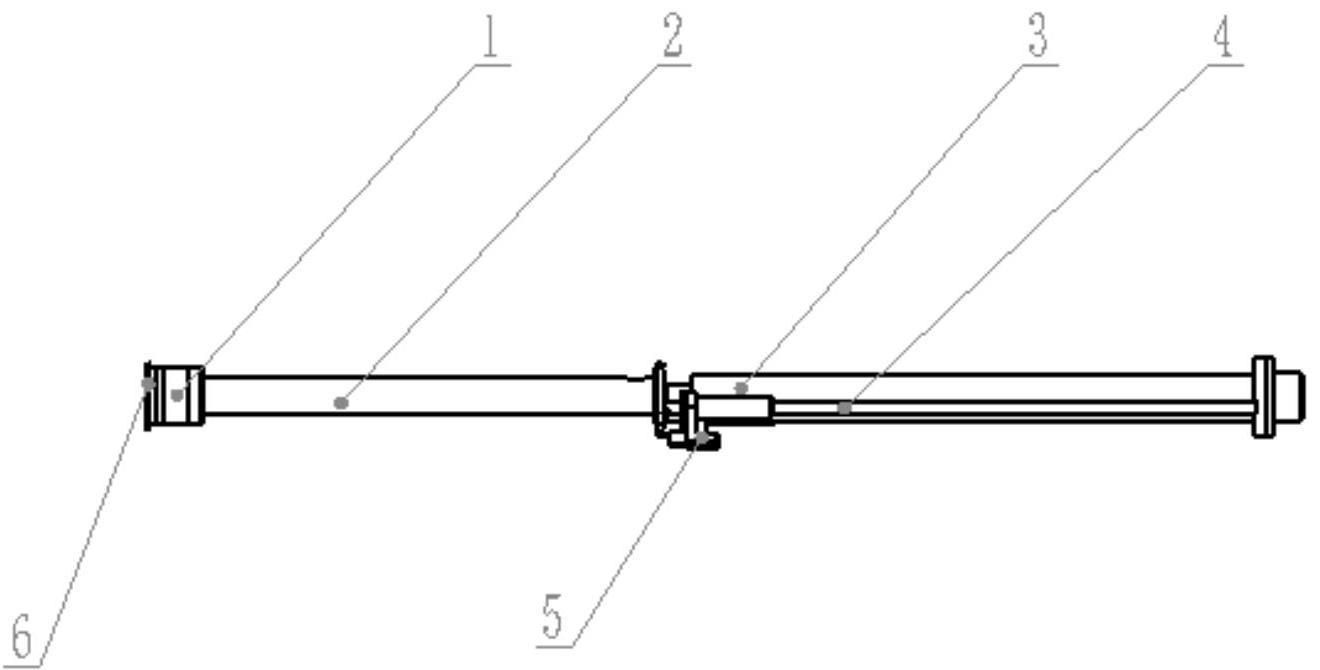
3、一种矿用机器人的雷达检测机构,包括雷达1、加长杆2、直线液压缸3、导向轴4、直线轴承结构及支座5、保护盖6组成;
4、所述雷达1水平布置安装在加长杆2端部,雷达1前端安装有保护盖6,所述直线液压缸3的前端通过加长杆2与雷达1连接,所述直线液压缸3的两侧设置导向轴4和直线轴承结构进行导向;所述支座5固定安装于直线轴承结构与外部车架之间进行固定。
5、所述直线液压缸3带有位移传感器,感知液压缸伸出长度。
6、所述支座5具体包括直线轴承支座以及油缸支座,所述直线轴承支座固定安装于直线轴承结构与外部车架之间,所述油缸支座固定安装于直线液压缸3缸体与外部车架之间。
7、本发明的有益效果:
8、本发明为一种矿用机器人的雷达检测机构,,该检测机构在喷浆机器人喷浆作业前,能够自动伸出,并能够自主控制伸出长度,对巷道表面进行扫描检测,检测完成后,该机构将雷达收回,藏于暗仓内,前端带有保护盖,避免被混凝土污染,实现了能够自动伸出扫描检测,自动收回隐藏保护。本发明结构简单,能够自动控制,便于保护隐藏,能够使用与喷浆作业的恶劣工况要求。
技术特征:
1.一种矿用机器人的雷达检测机构,其特征在于,包括雷达1、加长杆2、直线液压缸3、导向轴4、直线轴承结构及支座5、保护盖6组成;
2.根据权利要求1所述的一种矿用机器人的雷达检测机构,其特征在于,所述直线液压缸3带有位移传感器,感知液压缸伸出长度。
3.根据权利要求1所述的一种矿用机器人的雷达检测机构,其特征在于,所述支座5具体包括直线轴承支座以及油缸支座,所述直线轴承支座固定安装于直线轴承结构与外部车架之间,所述油缸支座固定安装于直线液压缸3缸体与外部车架之间。
技术总结
本发明提供一种矿用机器人的雷达检测机构,涉及井下喷浆技术领域。本发明包括雷达1、加长杆2、直线液压缸3、导向轴4、直线轴承结构及支座5、保护盖6组成;所述雷达1水平布置安装在加长杆2端部,雷达1前端安装有保护盖6,所述直线液压缸3的前端通过加长杆2与雷达1连接,所述直线液压缸3的两侧设置导向轴4和直线轴承结构进行导向;所述支座5固定安装于直线轴承结构与外部车架之间进行固定。所述直线液压缸3带有位移传感器,感知液压缸伸出长度。所述支座5具体包括直线轴承支座以及油缸支座,所述直线轴承支座固定安装于直线轴承结构与外部车架之间,所述油缸支座固定安装于直线液压缸3缸体与外部车架之间。
技术研发人员:张乘风,王广龙,肖松,张维娜,邱教伟,王晨,陈禹皓
受保护的技术使用者:陕西延长石油巴拉素煤业有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!