一种基于余度技术的惯性平台故障定位方法
本发明涉及惯性平台导航与故障定位领域,具体而言,涉及一种基于余度技术的惯性平台故障定位方法。
背景技术:
1、余度技术是指系统中使用重复的资源,并且对这些资源进行有效管理,以提高整个系统的可靠性。在惯性导航与高度测量中,一般可以利用惯性平台加速度计进行两次积分得到高度信号;但加速度计测量存在噪声干扰与误差,经过积分后会形成漂移与累积误差;而采用高度表测量的高度存在随机误差,将两种进行信息融合可以很好的形成余度技术为飞行器提高高度信息,其可靠性远大于单一器件测量方案。但一旦发生故障,需要对故障进行定位,判断出现故障的测量元器件以及发生故障的时间。传统的故障定位方式是需要计算残差,并根据经验值设置残差的期望与协方差数据,该数据获取比较复杂,或者对某些仪器故障难以准确测量得到残差期望与协方差数据。基于上述背景原因,本发明提高了一种基于多重平均增长速率预估的估计误差数据进行滤波后进行故障定位判断的方法,具有很好的工程应用效果。
2、需要说明的是,在上述背景技术部分发明的信息仅用于加强对本发明的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于提供一种基于余度技术的惯性平台故障定位方法,进而克服了由于相关技术的限制和缺陷而导致的惯性平台故障定位判断解算实施过于复杂问题。
2、根据本发明的一个方面,提供一种基于余度技术的惯性平台故障定位方法,包括以下步骤:
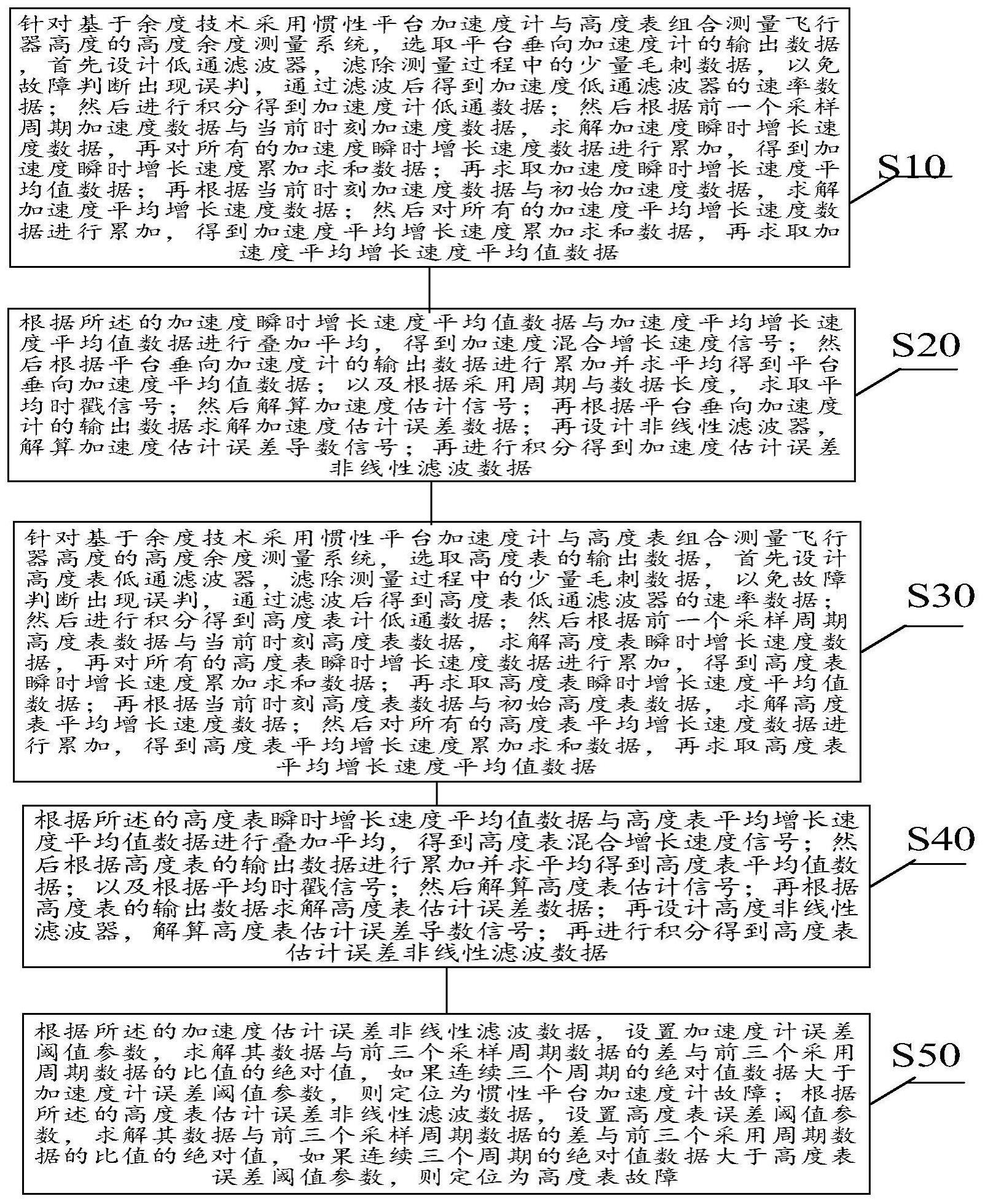
3、步骤s10,针对基于余度技术采用惯性平台加速度计与高度表组合测量飞行器高度的高度余度测量系统,选取平台垂向加速度计的输出数据,首先设计低通滤波器,滤除测量过程中的少量毛刺数据,以免故障判断出现误判,通过滤波后得到加速度低通滤波器的速率数据;然后进行积分得到加速度计低通数据;然后根据前一个采样周期加速度数据与当前时刻加速度数据,求解加速度瞬时增长速度数据,再对所有的加速度瞬时增长速度数据进行累加,得到加速度瞬时增长速度累加求和数据;再求取加速度瞬时增长速度平均值数据;再根据当前时刻加速度数据与初始加速度数据,求解加速度平均增长速度数据;然后对所有的加速度平均增长速度数据进行累加,得到加速度平均增长速度累加求和数据,再求取加速度平均增长速度平均值数据。
4、步骤s20,根据所述的加速度瞬时增长速度平均值数据与加速度平均增长速度平均值数据进行叠加平均,得到加速度混合增长速度信号;然后根据平台垂向加速度计的输出数据进行累加并求平均得到平台垂向加速度平均值数据;以及根据采用周期与数据长度,求取平均时戳信号;然后解算加速度估计信号;再根据平台垂向加速度计的输出数据求解加速度估计误差数据;再设计非线性滤波器,解算加速度估计误差导数信号;再进行积分得到加速度估计误差非线性滤波数据。
5、步骤s30中,针对基于余度技术采用惯性平台加速度计与高度表组合测量飞行器高度的高度余度测量系统,选取高度表的输出数据,首先设计高度表低通滤波器,滤除测量过程中的少量毛刺数据,以免故障判断出现误判,通过滤波后得到高度表低通滤波器的速率数据;然后进行积分得到高度表计低通数据;然后根据前一个采样周期高度表数据与当前时刻高度表数据,求解高度表瞬时增长速度数据,再对所有的高度表瞬时增长速度数据进行累加,得到高度表瞬时增长速度累加求和数据;再求取高度表瞬时增长速度平均值数据;再根据当前时刻高度表数据与初始高度表数据,求解高度表平均增长速度数据;然后对所有的高度表平均增长速度数据进行累加,得到高度表平均增长速度累加求和数据,再求取高度表平均增长速度平均值数据。
6、在步骤s40中,根据所述的高度表瞬时增长速度平均值数据与高度表平均增长速度平均值数据进行叠加平均,得到高度表混合增长速度信号;然后根据高度表的输出数据进行累加并求平均得到高度表平均值数据;以及根据平均时戳信号;然后解算高度表估计信号;再根据高度表的输出数据求解高度表估计误差数据;再设计高度非线性滤波器,解算高度表估计误差导数信号;再进行积分得到高度表估计误差非线性滤波数据。
7、步骤s50,根据所述的加速度估计误差非线性滤波数据,设置加速度计误差阈值参数,求解其数据与前三个采样周期数据的差与前三个采用周期数据的比值的绝对值,如果连续三个周期的绝对值数据大于加速度计误差阈值参数,则定位为惯性平台加速度计故障;根据所述的高度表估计误差非线性滤波数据,设置高度表误差阈值参数,求解其数据与前三个采样周期数据的差与前三个采用周期数据的比值的绝对值,如果连续三个周期的绝对值数据大于高度表误差阈值参数,则定位为高度表故障。
8、在本发明的一种示例实施例中,选取平台垂向加速度计的输出数据,设计低通滤波器,得到加速度低通滤波器的速率数据;进行积分得到加速度计低通数据;然后根据前一个采样周期加速度数据与当前时刻加速度数据,求解加速度瞬时增长速度数据,再对所有的加速度瞬时增长速度数据进行累加,得到加速度瞬时增长速度累加求和数据;再求取加速度瞬时增长速度平均值数据;再根据当前时刻加速度数据与初始加速度数据,求解加速度平均增长速度数据;然后对所有的加速度平均增长速度数据进行累加,得到加速度平均增长速度累加求和数据,再求取加速度平均增长速度平均值数据包括:
9、adc(i)=(a1(i)-ac(i))/t1;
10、
11、
12、
13、
14、
15、
16、
17、其中a1(i)为平台垂向加速度计的输出数据在t=i*t时刻的值,t为数据的采用周期,为常值时间参数;t1为低通滤波器的时间常数,为常值参数;adc为加速度低通滤波器的速率数据;ac为加速度计低通数据;kb(i)为加速度瞬时增长速度数据,sb(i)为加速度瞬时增长速度累加求和数据;kb1(n)为加速度瞬时增长速度平均值数据,n为当前时刻的数据长度,为整数;i<n为当前时刻之前的数据长度;kc(i)为加速度平均增长速度数据;sc(i)为加速度平均增长速度累加求和数据,kc1(n)为加速度平均增长速度平均值数据。
18、在本发明的一种示例实施例中,根据所述的加速度瞬时增长速度平均值数据与加速度平均增长速度平均值数据进行叠加平均,得到加速度混合增长速度信号;然后根据平台垂向加速度计的输出数据进行累加并求平均得到平台垂向加速度平均值数据;以及根据采用周期与数据长度,求取平均时戳信号;然后解算加速度估计信号;再根据平台垂向加速度计的输出数据求解加速度估计误差数据;再设计非线性滤波器,解算加速度估计误差导数信号;再进行积分得到加速度估计误差非线性滤波数据包括:
19、
20、
21、
22、ag(n)=ka1(n)(nt-bp)+ap(n);
23、ea(n)=ag(n)-a1(n);
24、
25、
26、其中ka1(n)为加速度混合增长速度信号;ap(n)为平台垂向加速度平均值数据;bp为平均时戳信号;ag(n)为加速度估计信号;ea(n)为加速度估计误差数据;eda(n)为加速度估计误差导数信号;k2、ε1为常值参数信号,t2为非线性滤波器的时间常数信号;ela(n)为加速度估计误差非线性滤波数据。
27、在本发明的一种示例实施例中,选取高度表的输出数据,设计高度表低通滤波器,得到高度表低通滤波器的速率数据;然后进行积分得到高度表计低通数据;然后根据前一个采样周期高度表数据与当前时刻高度表数据,求解高度表瞬时增长速度数据,再对所有的高度表瞬时增长速度数据进行累加,得到高度表瞬时增长速度累加求和数据;再求取高度表瞬时增长速度平均值数据;再根据当前时刻高度表数据与初始高度表数据,求解高度表平均增长速度数据;然后对所有的高度表平均增长速度数据进行累加,得到高度表平均增长速度累加求和数据,再求取高度表平均增长速度平均值数据包括:
28、ydc(i)=(y1(i)-yc(i))/t3;
29、
30、
31、
32、
33、
34、
35、
36、其中y1(i)为高度表的输出数据在t=i*t时刻的值,t3为高度表低通滤波器的时间常数,为常值参数;ydc为高度表低通滤波器的速率数据;yc为高度表低通数据;kd(i)为高度表瞬时增长速度数据,sd(i)为高度表瞬时增长速度累加求和数据;kd1(n)为高度表瞬时增长速度平均值数据,kf(i)为高度表平均增长速度数据;sf(i)为高度表平均增长速度累加求和数据,kf1(n)为高度表平均增长速度平均值数据。
37、在本发明的一种示例实施例中,根据所述的高度表瞬时增长速度平均值数据与高度表平均增长速度平均值数据进行叠加平均,得到高度表混合增长速度信号;然后根据高度表的输出数据进行累加并求平均得到高度表平均值数据;以及根据平均时戳信号;然后解算高度表估计信号;再根据高度表的输出数据求解高度表估计误差数据;再设计高度非线性滤波器,解算高度表估计误差导数信号;再进行积分得到高度表估计误差非线性滤波数据包括:
38、
39、
40、yg(n)=kg1(n)(nt-bp)+yp(n);
41、ey(n)=yg(n)-y1(n);
42、
43、
44、其中kg1(n)为高度表混合增长速度信号;yp(n)为高度表平均值数据;yg(n)为加速度估计信号;ey(n)为高度表估计误差数据;edy(n)为高度表估计误差导数信号;k4、ε2为常值参数信号,t4为高度非线性滤波器的时间常数信号;ely(n)为高度表估计误差非线性滤波数据。
45、在本发明的一种示例实施例中,根据所述的加速度估计误差非线性滤波数据,设置加速度计误差阈值参数,求解其数据与前三个采样周期数据的差与前三个采用周期数据的比值的绝对值,如果连续三个周期的绝对值数据大于加速度计误差阈值参数,则定位为惯性平台加速度计故障;根据所述的高度表估计误差非线性滤波数据,设置高度表误差阈值参数,求解其数据与前三个采样周期数据的差与前三个采用周期数据的比值的绝对值,如果连续三个周期的绝对值数据大于高度表误差阈值参数,则定位为高度表故障包括:
46、
47、
48、
49、
50、
51、
52、其中α0为加速度计误差阈值参数,其为常值;jt为加速度计发生故障的时刻;β0为高度表误差阈值参数,其为常值;wt为高度表发生故障的时刻。
53、有益效果
54、本发明一种基于余度技术的惯性平台故障定位方法,其主要创新点有如下四点。第一点提出了采用低通滤波器对加速度计与高度表的输出数据进行初步滤波,从而能够滤除测量过程中的少量毛刺数据,减少故障判断过程中的误判概率。第二点是通过对加速度计与高度表的瞬时增长速度平均值数据与平均增长速度平均值数据进行叠加平均,得到加速度高度表混合增长速度信号,从而基于该信号进行预估,大大提高了预估的准确度以及减少了干扰对结果的敏感度。第三点是通过加速度与高度表估计信号再求解加速度与高度表估计误差数据,进一步为故障判断提高依据的方法,实施非常方便,而且故障定位的准确率比较高。第四是设计非线性滤波器,解算加速度计与高度表估计误差非线性滤波数据,进一步剔除了干扰下数据跳变奇异点,能够有效避免故障定位过程中的误报。
55、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!