一种采用卫星影像辅助和无线通信网络的定位方法与流程
1.本发明涉及车辆定位的技术领域,尤其涉及一种采用卫星影像辅助和无线通信网络的定位方法。
背景技术:
2.随着车辆物联网和无线通信网络的不断发展,车辆技术改革正在不断深化。着眼于车辆定位领域,现有车辆定位采用卫星联网跟踪,同步将后续跟踪位置共享至移动客户端进行位置的联网查看,此种定位方式一方面当车辆处于网络环境较差的环境时,定位的精度不足,位置同步过程受到网络环境影响较大,另一方面,现有的车辆定位方式对于定位完成后车辆后续附近状态未得到具体展示,当车辆停放在拥挤地段时,车辆后续容易出现堵塞状况,现有定位方式也未能保证车辆定位位置的后续行进顺畅性跟踪。
技术实现要素:
3.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
4.鉴于上述现有车辆定位方式存在的问题,提出了本发明。
5.因此,本发明解决的技术问题是:解决现有车辆定位方式一方面当车辆处于网络环境较差的环境时定位精度不足,另一方面对于定位完成后车辆后续附近状态未得到具体展示的问题。
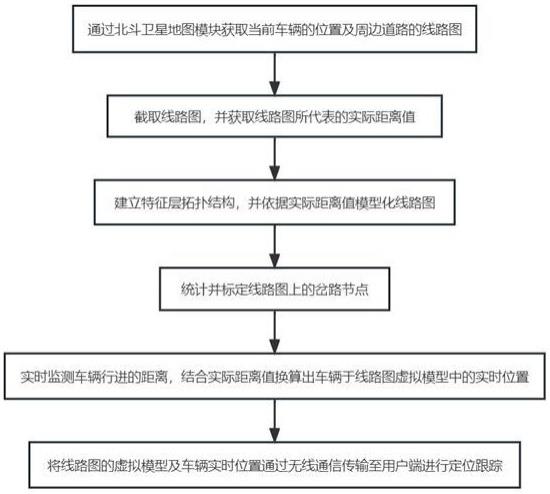
6.为解决上述技术问题,本发明提供如下技术方案:一种采用卫星影像辅助和无线通信网络的定位方法,车辆联网状态实时开启,并当联网信号低于信号阈值时触发指令,开启嵌设于车辆物联处理系统中的自定位部件用于车辆自定位;其中,所述自定位部件进行车辆自定位时,包括以下步骤:s1:通过北斗卫星地图模块获取当前车辆的位置及周边道路的线路图;s2:截取所述线路图,并获取所述线路图所代表的实际距离值;s3:建立特征层拓扑结构,并依据所述实际距离值模型化所述线路图;s4:统计并标定所述线路图上的岔路节点;s5:实时监测车辆行进的距离,结合所述实际距离值换算出车辆于所述线路图虚拟模型中的实时位置;s6:将所述线路图的虚拟模型及车辆实时位置通过无线通信传输至用户端进行定位跟踪。
7.作为本发明所述的采用卫星影像辅助和无线通信网络的定位方法的一种优选方案,其中:定义所述信号阈值定义为50kb/s。
8.作为本发明所述的采用卫星影像辅助和无线通信网络的定位方法的一种优选方案,其中:换算出车辆于所述线路图虚拟模型中的实时位置还包括:s1:所述线路图虚拟模型中,定义当前车辆的方向为基准方向;s2:实时获取车辆行进状态时的方向转移位置及方向偏移角度;s3:当车辆处于标定的岔路节点时,实时获取各岔路车辆行进状态时距离所述基准方向的各方向模拟转移位置及对应的各方向模拟偏移角度;s4:同一性对比所述方向
转移位置、所述方向偏移角度与各所述方向模拟转移位置、各所述方向模拟偏移角度,获取车辆在岔路节点时的选择道路;s5:依据所述选择道路及所述实际距离值换算出车辆于所述线路图虚拟模型中的实时位置。
9.作为本发明所述的采用卫星影像辅助和无线通信网络的定位方法的一种优选方案,其中:所述自定位部件还包括嵌设的超声通信装置,当车辆于定位点时,所述超声通信装置启用,具体包括如下步骤:s1:所述超声通信装置建立超声信号塔,超声范围内实时发出超声信号;s2:用户端内设置的超声接收返还装置,超声范围内接收超声信号,并同步返还信号至初点;s3:超声范围内,所述超声通信装置实时接收返还信号,并实时同步获取信号返还的量度;s4:行进时,依据所述量度的变化确定用户端的行进基准方向。
10.作为本发明所述的采用卫星影像辅助和无线通信网络的定位方法的一种优选方案,其中:定义所述量度变小时,用户端的行进基准方向正确。
11.作为本发明所述的采用卫星影像辅助和无线通信网络的定位方法的一种优选方案,其中:所述自定位部件进行车辆自定位时,还包括以下步骤:s1:定位完成后,所述自定位部件依据当前位置信息实时获取卫星影像数据;s2:利用selenium库访问目标图像数据;s3:通过pytesseract库对目标图像数据进行图像识别;s4:解析出车辆附近杂物比重;s5:实时传输所述杂物比重及卫星影像数据至用户端,当所述杂物比重达到阈值时,定义车辆定位点后续健康状态不达标,并进行报警提醒。
12.作为本发明所述的采用卫星影像辅助和无线通信网络的定位方法的一种优选方案,其中:对目标图像数据进行图像识别具体包括:s1:读取目标图像数据点云数据,将点云数据进行带通滤波,分离成目标车辆点云和杂物点云;s2:从所述目标车辆点云中选取出4个点,作为点云代表;s3:获取选取出的4个点之间的平面方程,作为初步拟合平面;s4:对所述杂物点云采用ransac进行直线提取;s5:根据直线的回归结果获取补全因子;s6:统计所有补全因子大于设定阈值的inliners数作为杂物点云范围。
13.作为本发明所述的采用卫星影像辅助和无线通信网络的定位方法的一种优选方案,其中:定义所述设定阈值为0.2。
14.作为本发明所述的采用卫星影像辅助和无线通信网络的定位方法的一种优选方案,其中:定义所述杂物比重的阈值为30%。
15.本发明的有益效果:本发明提供一种采用卫星影像辅助和无线通信网络的定位方法,当网络定位环境较差时,通过自定位部件模型化行进线路图、判定行进路线及行进实际距离,获取车辆实时定位点,克服了网络环境较差时定位不精确的问题;同时,嵌设的超声通信装置依据返还信号量度的变化确定用户端的行进基准方向,无网络极限环境下提升了用户端距离定位点行进方向的准确性;额外的,自定位部件实时获取卫星影像数据,通过对后续定位点的杂物比重识别获取确定了车辆后续的健康状态,对于定位完成后车辆后续附近状态得到了具体展示,确保了车辆定位位置后续行进顺畅性的跟踪。
附图说明
16.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它
的附图。其中:图1为本发明提供的采用卫星影像辅助和无线通信网络的定位方法的整体方法流程图。
17.图2为本发明提供的换算出车辆于线路图虚拟模型中实时位置的方法流程图。
18.图3为本发明提供的超声通信装置启用的方法流程图。
19.图4为本发明提供的自定位部件联动卫星影像的方法流程图。
20.图5为本发明提供的对目标图像数据进行图像识别的方法流程图。
21.图6为本发明提供的自定位部件模型化线路图的拓扑结构展示图。
22.图7为本发明提供的截取道路线路图具体的运行代码展示图。
具体实施方式
23.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明,显然所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明的保护的范围。
24.着眼于车辆定位领域,现有车辆定位采用卫星联网跟踪,同步将后续跟踪位置共享至移动客户端进行位置的联网查看,此种定位方式一方面当车辆处于网络环境较差的环境时,定位的精度不足,位置同步过程受到网络环境影响较大,另一方面,现有的车辆定位方式对于定位完成后车辆后续附近状态未得到具体展示,当车辆停放在拥挤地段时,车辆后续容易出现堵塞状况,现有定位方式也未能保证车辆定位位置的后续行进顺畅性跟踪。
25.故此,请参阅图1,本发明提供一种采用卫星影像辅助和无线通信网络的定位方法,车辆联网状态实时开启,并当联网信号低于信号阈值时触发指令,开启嵌设于车辆物联处理系统中的自定位部件用于车辆自定位;其中,自定位部件进行车辆自定位时,包括以下步骤:s1:通过北斗卫星地图模块获取当前车辆的位置及周边道路的线路图;s2:截取线路图,并获取线路图所代表的实际距离值;考虑到线路图的获得现有一般通过下载线路图后辨别选择后进行拆分,此种方式运行量大,运算结果较长,故此,本发明创造性采用截取的方式进行线路图的获取,对比如下表1:
26.由上表1所示,在simuworks仿真环境中进行本发明和现有技术,选取单次获取线路图时间以及多次(优选20次,可最大限度在节约运算次数的基础上得出性能比对)运行流畅度进行对比,明显看出本发明在单次获取线路图的时间上明显优于现有技术,同时本发明的获取流畅度也高于现有技术。
27.具体的,截取道路的线路图具体的运行代码请参阅图7。
28.s3:建立特征层拓扑结构,并依据实际距离值模型化线路图,请参阅图6;采用三维建模技术对线路图进行虚拟建模,建立与物理世界孪生的数字世界。数字世界即对物理世界数字化,采用三维建模技术建立一个与线路图相一致的场景虚拟模型。
29.数字世界构建方式具体为:首先创建gis(geographic information system,地理信息系统)特征层;然后通过arcgis处理gis特征层,通过arcscene创建三维模型和拓扑结构,建立对应的数字世界。
30.s4:统计并标定线路图上的岔路节点;s5:实时监测车辆行进的距离,结合实际距离值换算出车辆于线路图虚拟模型中的实时位置;实际距离值可以通过导航中的原始纳入技术得出,而后实时监测车辆在进入道路后行进的距离,结合实际距离值换算出车辆于线路图虚拟模型中的实时位置,运算公式如下:
31.实时进行相应位置的获取,得出车辆在无信号道路上的实时位置。
32.s6:将线路图的虚拟模型及车辆实时位置通过无线通信传输至用户端进行定位跟踪。
33.具体的,定义信号阈值定义为50kb/s。
34.本发明中自定位部件使用技术成熟的英特尔d945gclf2d主板,该主板支持atom双核n330 cpu,配有英特尔945gc express芯片组,在内存方面支持一个667mhz单通道ddr2 sdram接口,最高可支持2gb内存,具备9针串口、6个usb接口,提供了sata硬盘接口。此外,该主板的尺寸为171.45mm
×
171.45mm,能够符合实际要求。
35.进一步的,请参阅图2,换算出车辆于线路图虚拟模型中的实时位置还包括:s1:线路图虚拟模型中,定义当前车辆的方向为基准方向;s2:实时获取车辆行进状态时的方向转移位置及方向偏移角度;s3:当车辆处于标定的岔路节点时,实时获取各岔路车辆行进状态时距离基准方向的各方向模拟转移位置及对应的各方向模拟偏移角度;s4:同一性对比方向转移位置、方向偏移角度与各方向模拟转移位置、各方向模拟偏移角度,获取车辆在岔路节点时的选择道路;s5:依据选择道路及实际距离值换算出车辆于线路图虚拟模型中的实时位置。
36.需要说明的是,获取车辆在岔路节点时的选择道路能够进一步提升行进路线的准确性。
37.更进一步的,自定位部件还包括嵌设的超声通信装置,当车辆于定位点时,超声通信装置启用,请参阅图3,具体包括如下步骤:s1:超声通信装置建立超声信号塔,超声范围内实时发出超声信号;需要说明的是,超声信号塔相当于超声源,用于在超声范围内实时发出超声信号。
38.s2:用户端内设置的超声接收返还装置,超声范围内接收超声信号,并同步返还信号至初点;s3:超声范围内,超声通信装置实时接收返还信号,并实时同步获取信号返还的量度;s4:行进时,依据量度的变化确定用户端的行进基准方向。
39.其中,定义量度变小时,用户端的行进基准方向正确。
40.额外的,请参阅图4,自定位部件进行车辆自定位时,还包括以下步骤:s1:定位完成后,自定位部件依据当前位置信息实时获取卫星影像数据;s2:利用selenium库访问目标图像数据;定义如下:from selenium import webdriverdriver = webdriver.chrome()driver.get('url')s3:通过pytesseract库对目标图像数据进行图像识别;具体的,请参阅图5,对目标图像数据进行图像识别具体包括:s3.1:socket读取目标图像数据点云数据,将点云数据进行带通滤波,分离成目标车辆点云和杂物点云;采用坐标测量机或额外内置系统中的激光雷达,获取点云,为现有常规技术的运用,在此不做多余赘述。
41.需要说明的是,socket是网络交换数据的机制,为现有的专业通信手段;并且进行带通滤波过程中,根据不同事物的高度阈值及宽度阈值,就可以带通滤波,带通滤波为通信信号处理的常规手段,在此不做多余赘述。
42.s3.2:从目标车辆点云中选取出4个点,作为点云代表;需要说明的是,目标车辆点云中随机选取4个点,优选为上下(或左右)均匀分布的4个点。
43.s3.3:获取选取出的4个点之间的平面方程,作为初步拟合平面;平面模型如下:
44.随机采样4个点来拟合平面,然后重复以上算法m次,最终选择内点个数最多的平面参数,用该平面来拟合此刻的初步拟合平面。
45.s3.4:对杂物点云采用ransac进行直线提取;提取过程为采用ransac直接进行数据提取,提取出杂物点云的直线方程;ransac方法为现有的方法,具备计算量小、速度快的优势;s3.5:根据直线的回归结果获取补全因子;直接获取杂物点云的直线方程相较于初步拟合平面的回归结果即可;回归原理如下:line1索引映射关系如下:
46.其中表示分割结果在二维点云上的索引,表示回归高度阈值(或以宽度为比较的话则为宽度阈值,随意即可),表示二维点云上分割结果直线点云的平均高度(或以宽度为比较的话则为平均宽度,随意即可)。
47.或者在对目标图像数据进行图像识别时,直接采用现有ocr等技术进行识别,在此不做要求,若使用ocr识别的方式来进行解析,只需关注真实人眼所见内容,拍摄图像进行图像识别即可。
48.ocr程序可直接识别文字内容及图片内容,无需分析网站是否使用ajax等异步加载技术。ocr(optical character recognition,光学字符识别)是指电子设备(例如扫描仪或数码相机)检查纸上打印的字符,通过检测暗、亮的模式确定其形状,然后用字符识别方法将形状翻译成计算机文字的过程;即,针对印刷体字符,采用光学的方式将纸质文档中的文字转换成为黑白点阵的图像文件,并通过识别软件将图像中的文字转换成文本格式,供文字处理软件进一步编辑加工的技术。如何除错或利用辅助信息提高识别正确率,是ocr最重要的课题,icr(intelligent character recognition)的名词也因此而产生。衡量一个ocr系统性能好坏的主要指标有:拒识率、误识率、识别速度、用户界面的友好性,产品的稳定性,易用性及可行性等。
49.s3.6:统计所有补全因子大于设定阈值的inliners数作为杂物点云范围。
50.具体的,定义设定阈值为0.2。
51.s4:解析出车辆附近杂物比重;s5:实时传输杂物比重及卫星影像数据至用户端,当杂物比重达到阈值时,定义车辆定位点后续健康状态不达标,并进行报警提醒。
52.具体的,定义杂物比重的阈值为30%。
53.本发明提供一种采用卫星影像辅助和无线通信网络的定位方法,当网络定位环境较差时,通过自定位部件模型化行进线路图、判定行进路线及行进实际距离,获取车辆实时定位点,克服了网络环境较差时定位不精确的问题;同时,嵌设的超声通信装置依据返还信号量度的变化确定用户端的行进基准方向,无网络极限环境下提升了用户端距离定位点行进方向的准确性;额外的,自定位部件实时获取卫星影像数据,通过对后续定位点的杂物比重识别获取确定了车辆后续的健康状态,对于定位完成后车辆后续附近状态得到了具体展示,确保了车辆定位位置后续行进顺畅性的跟踪。
54.应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1