基于精密转台的船舶高度测量方法、系统、设备及介质与流程
本发明涉及测量,具体涉及基于精密转台的船舶高度测量方法、系统、设备及介质。
背景技术:
1、近年来,随着国内国民经济的高速增长,内河航运事业迅速发展,内河航运交通变得越来越繁忙,由于航道桥梁通航宽度和高度有限,或者船舶驾驶员粗心大意、盲目自信,又或者由于天气水文等因素的影响,经常发生船舶碰撞桥梁事故,事故造成重大的社会影响,经济损失严重。
2、目前,相关领域的研究人员对于船舶高度的测量方法展开了研究,例如,申请号为202111233341.x,专利名称为一种船舶优化识别和实时跟踪方法及防撞预警系统的发明专利,通过沿岸设置的多个岸基雷达和云台相机,形成航道内的网状监测系统,通过岸基雷达采集航道船舶的位置坐标,通过云台相机采集航道的彩色图像数据,同时接收船舶ais报文信息,通过多数据来源保证监测数据的准确性。但是,上述发明中,需要在沿岸设置多个岸基雷达以及云台相机,大大增加了数据监测的成本。申请号为202210330165.x,专利名称为一种桥梁防撞主动预警监测系统及方法的发明专利,采用可变焦热像云台对监控水域的船舶进行监测,借助其镜头可变焦的特点,可有效延长热像仪的作用距离,同时,将热像仪安装在双轴云台上,可以补偿其在长焦模式下视场角较小的问题。但是,存在以下缺点:(1)热像仪的水平安装角度会在船距离较远时被放大,影响监测的准确性;(2)由于热像仪的安装高度与通航限位高度重合,当船只与桥梁发生碰撞时,很可能会碰撞热像仪。申请号为201710074523.4,专利名称为一种水路桥梁防撞激光预警系统及实现方法的发明专利,采用激光雷达获得船舶地理坐标信息的点云数据,经过点云数据处理技术进行方位坐标、外形尺寸、船高的计算。由于受激光雷达的功率限制,探测距离不能超过300米。
技术实现思路
1、针对现有技术中的缺陷,本发明提供的基于精密转台的船舶高度测量方法、系统、设备及介质,同时满足偏航与超高预警功能、安全工作距离可以达到2km、且测量精度不受光学系统畸变的影响。
2、为了解决上述技术问题,本发明提出以下技术方案:
3、基于精密转台的船舶高度测量方法,包括以下步骤:
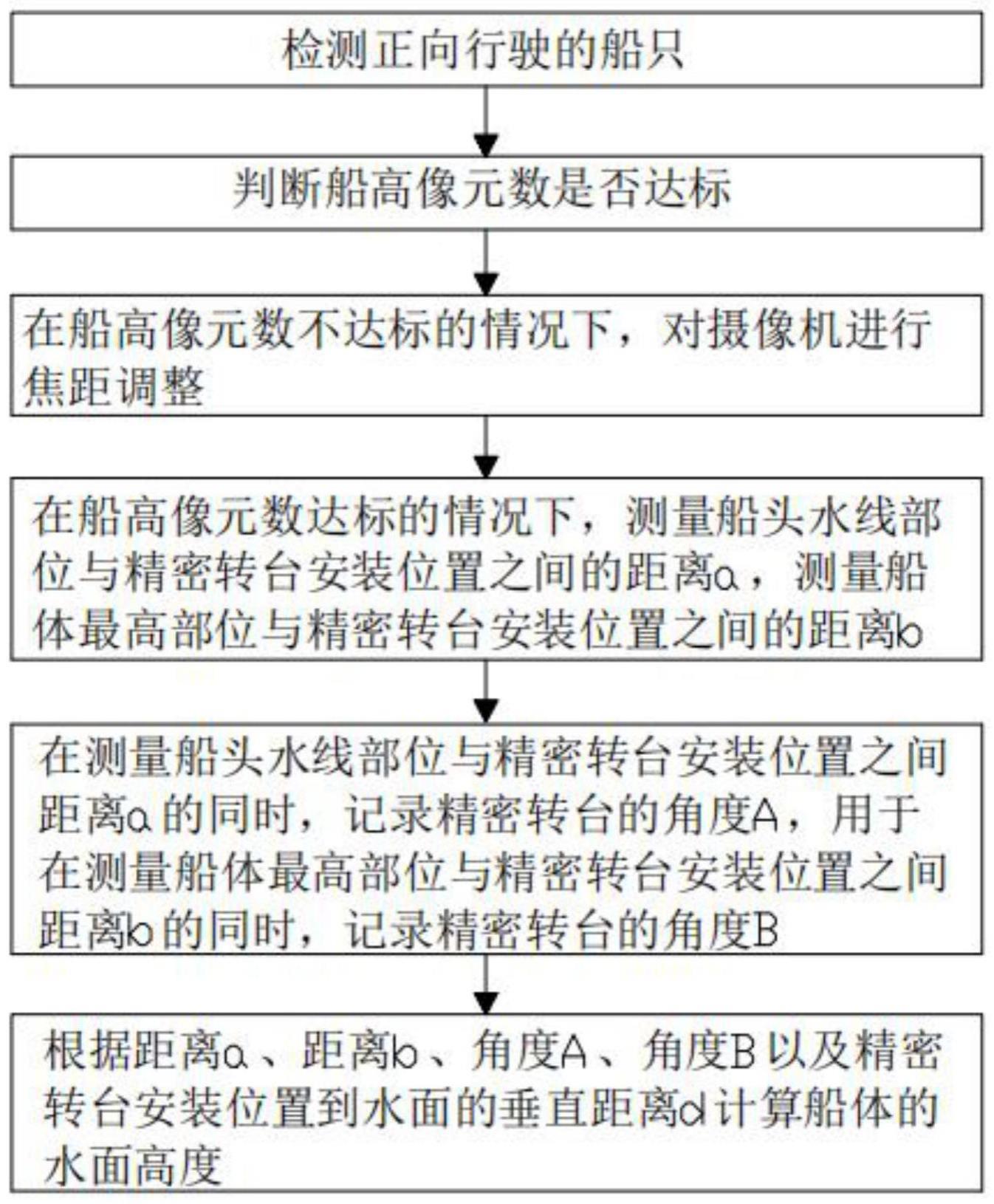
4、检测正向行驶的船只;
5、判断船高像元数是否达标;
6、在船高像元数不达标的情况下,对摄像机进行焦距调整;
7、在船高像元数达标的情况下,测量船头水线部位与精密转台安装位置之间的距离a,测量船体最高部位与精密转台安装位置之间的距离b;
8、在测量船头水线部位与精密转台安装位置之间距离a的同时,记录精密转台的角度a,用于在测量船体最高部位与精密转台安装位置之间距离b的同时,记录精密转台的角度b;
9、根据距离a、距离b、角度a、角度b以及精密转台安装位置到水面的垂直距离d计算船体的水面高度h。
10、进一步地,所述在船高像元数不达标的情况下,对摄像机进行焦距调整,包括以下步骤:
11、判断是否为最大焦距;
12、在不是最大焦距的情况下,对摄像机的焦距进行放大调整;
13、在最大焦距的情况下或对摄像机的焦距进行放大调整后,继续检测正向行驶的船只。
14、进一步地,所述根据距离a、距离b、角度a、角度b以及精密转台安装位置到水面的垂直距离d计算船体的水面高度h,包括以下步骤:
15、将精密转台安装位置、船头水线部位和船体最高部位作为三角形的三个顶点,精密转台安装位置与船头水线部位之间的连线作为第一条边,第一条边相对的顶角为d,距离a对应第一条边的长度;精密转台安装位置与船体最高部位之间的连线作为第二条边,第二条边相对的顶角为e,距离b对应第二条边的长度;船头水线部位和船体最高部位之间的连线作为第三条边,第三条边相对的顶角为c,距离c对应第三条边的长度;
16、计算顶角c的角度,其中,c=b-a;
17、计算船头水线部位与船体最高部位之间的距离c,
18、用于计算顶角e的角度,其中
19、计算第一条边与水平线之间夹角f的角度,
20、计算第三条边与水平线之间夹角h的角度,h=180°-e-f;
21、计算船体最高部位与水平线之间的垂直距离h,h=c·sin(h)。
22、本发明还提供基于精密转台的船舶高度测量系统,包括:
23、摄像机,其安装在精密转台上,用于检测正向行驶的船只;
24、判断模块,其用于判断船高像元数是否达标;
25、调整模块,其位于摄像机的内部,用于在船高像元数不达标的情况下,对摄像机进行焦距调整;
26、激光测距仪,其安装在精密转台上,用于在船高像元数达标的情况下,测量船头水线部位与精密转台安装位置之间的距离a,测量船体最高部位与精密转台安装位置之间的距离b;
27、垂直码盘,其位于精密转台的内部,用于在测量船头水线部位与精密转台安装位置之间距离a的同时,记录精密转台的角度a,用于在测量船体最高部位与精密转台安装位置之间距离b的同时,记录精密转台的角度b;
28、计算模块,其用于根据距离a、距离b、角度a、角度b以及精密转台安装位置到水面的垂直距离d计算船体的水面高度h。
29、进一步地,所述调整模块包括:
30、焦距判断模块,其用于在船高像元数不达标的情况下,判断是否为最大焦距;
31、焦距调整模块,其用于在不是最大焦距的情况下,对摄像机的焦距进行放大调整;
32、返回模块,其用于在最大焦距的情况下或对摄像机的焦距进行放大调整后,继续检测正向行驶的船只。
33、进一步地,所述计算模块包括:
34、三角形形成模块,其用于将精密转台安装位置、船头水线部位和船体最高部位作为三角形的三个顶点,精密转台安装位置与船头水线部位之间的连线作为第一条边,第一条边相对的顶角为d,距离a对应第一条边的长度;精密转台安装位置与船体最高部位之间的连线作为第二条边,第二条边相对的顶角为e,距离b对应第二条边的长度;船头水线部位和船体最高部位之间的连线作为第三条边,第三条边相对的顶角为c,距离c对应第三条边的长度;
35、顶角c计算模块,其用于计算顶角c的角度,其中,c=b-a;
36、距离c计算模块,其用于计算船头水线部位与船体最高部位之间的距离c,
37、顶角e计算模块,其用于计算顶角e的角度,其中
38、夹角f计算模块,其用于计算第一条边与水平线之间夹角f的角度,
39、夹角h计算模块,其用于计算第三条边与水平线之间夹角g的角度,h=180°-e-f;
40、船体的水面高度h计算模块,其用于计算船体最高部位与水平线之间的垂直距离h,h=c·sin(h)。
41、本发明提供一种测量设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述所述的方法。
42、本发明提供一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述所述的方法。
43、由上述技术方案可知,本发明的有益效果:无需在河岸架设测高的摄像机,可以同时满足偏航与超高预警功能。另外激光测距仪的安全工作距离可以达到2km,可以解决激光雷达的工作距离不足的问题,且测量精度不受光学系统畸变的影响。
- 还没有人留言评论。精彩留言会获得点赞!