一种基于质子磁力仪的无人机航空磁测装置及方法与流程
1.本发明属于磁场信号测量技术领域,具体涉及一种结构简单、磁测分辨率和探测精度高、航磁基础数据丰富的基于质子磁力仪的无人机航空磁测装置及方法。
背景技术:
2.质子磁力仪是地面磁测工作的常用设备,其利用氢核质子在地磁场作用下发生拉莫尔旋进,通过精确测量旋进信号频率以计算地磁场的磁感应强度。质子磁力仪是目前性价比最高的磁测设备,而且探测精度高,但由于其每次采样都需要进行激发,使得采样的最短周期一般为2~3 s。
3.航空磁测(简称“航磁”),是将磁力仪搭载于飞行器上,然后控制飞行器按照设计的航线执行对地磁场进行探测的一种方法,在各种地质调查、大地构造等科学研究当中发挥着重要作用。由于航磁工作流动作业的特性,因此需要较高采样率的磁力仪才能提升航线的勘探密度。例如,当航空器的飞行速度为10 m/s时,如使用最短测量周期为2 s的质子磁力仪开展航磁探测,只能完成20 m点距的探测工作。而如果要增加勘探密度,则只能降低飞行速度,这将会增加飞行成本且无法发挥出飞行器的速度优势。此外,由于《dz/t 0142-1994 航空磁测技术规范》要求开展航空磁测设备的采样率要大于1 hz,而质子磁力仪的采样率并不能满足要求。另外,对于航磁工作,除了磁测的采样率外,还需要实时提供位置信息和离地高度信息,以便后期对资料的分析和使用。综上所述,目前单独使用质子磁力仪并不能满足航磁工作的要求。
4.传统航空磁测装置需要在有人驾驶的飞机上才能作业,不仅作业成本高,而且还受天气、地形、机械等条件的限制。现有技术中,有通过在无人机上设置数据采集系统、gps定位系统,然后通过磁探杆在无人机外侧设置光泵磁力仪及三轴矢量磁力仪,以光泵磁力仪测量地球磁力总场,而三轴矢量磁力仪用于测量无人机姿态对总场数据进行补偿,但其三轴矢量磁力仪数据中会夹杂噪声,从而使总场的补偿过程中引入噪声,而且其离地信息需要通过将gps数据与三维地图软件反演获得,导致其获得的相对高度精度较低,地质解释困难且不可靠。此外,也有通过在无人机下吊挂感应式磁传感器实现磁感应强度的高采样率,但由于其只能获取磁感应强度的相对变化,而无法得到总磁感应强度;而且常规的感应式磁传感器其结构及吊挂技术不适于空中飞行,从而会影响接收数据的质量;且感应式磁传感器的接收线圈距地面的相对高度需要通过后期反演获得,导致其相对高度精度较低。为此,还有在接收线圈的内侧增加姿态解算模块、九轴姿态传感器和gps,以九轴姿态传感器中的三轴磁通门作为磁场感应传感器以提高磁场强度的感知精度和采样率,并以九轴姿态传感器中的三轴加速度计、三轴磁通门和三轴陀螺仪联合形成惯导系统进行姿态补偿以减少航空作业时的干扰,并且通过接收线圈与gps数据结合,可精确解算出接收线圈的高度信息,但仍然无法直接得到总磁感应强度和相对高度,而且较多的传感器导致结构复杂且相互间的计算过程较为繁琐。
技术实现要素:
5.根据现有技术的不足,本发明提供一种结构简单、磁测分辨率和探测精度高、航磁基础数据丰富的基于质子磁力仪的无人机航空磁测装置,还提供了一种基于质子磁力仪的无人机航空磁测装置的磁测方法。
6.本发明基于质子磁力仪的无人机航空磁测装置是这样实现的:包括感应式磁传感器、挂载板、数据采集系统、超声波测距仪、gnss天线、质子磁力仪探头,所述感应式磁传感器包括环状的非磁性刚性外壳、固定设置于非磁性刚性外壳内的感应式电磁接收线圈,所述挂载板为刚性薄板,所述非磁性刚性外壳与挂载板固定连接,所述数据采集系统、超声波测距仪、gnss天线及质子磁力仪探头分别固定设置在非磁性刚性外壳内侧的挂载板上;所述数据采集系统包括主控模块、存储模块、质子磁力仪主机、gnss主机、数据采集卡,所述感应式电磁接收线圈与数据采集卡连接,所述gnss天线与gnss主机连接,所述质子磁力仪探头与质子磁力仪主机连接,所述超声波测距仪、质子磁力仪主机、gnss主机、数据采集卡分别与主控模块连接,所述主控模块对超声波测距仪及质子磁力仪主机进行控制,并接收超声波测距仪、质子磁力仪主机、gnss主机和感应式电磁接收线圈数据并记录于存储模块中。
7.本发明基于质子磁力仪的无人机航空磁测装置的磁测方法是这样实现的,包括以下步骤:a、硬件安装:将感应式磁传感器对称固定在挂载板上,然后在感应式磁传感器内侧的挂载板上分别固定数据采集系统、超声波测距仪、gnss天线及质子磁力仪探头,随后将挂载板用非磁性的抗扭绳与无人机底部连接;b、信号连接:将感应式磁传感器的感应式电磁接收线圈与数据采集系统的数据采集卡连接,gnss天线与数据采集系统的gnss主机连接,质子磁力仪探头与数据采集系统的质子磁力仪主机连接,超声波测距仪与数据采集系统的主控模块连接;c、数据采集:控制飞行器按照设计的航线执行作业,数据采集系统的主控模块对超声波测距仪及质子磁力仪主机进行控制,并同步接收超声波测距仪、质子磁力仪主机、gnss主机和感应式电磁接收线圈的数据并记录于存储模块中;d、数据计算:主控模块对接收到的感应式电磁接收线圈的感应电动势、质子磁力仪主机的磁感应强度进行计算,得到质子磁力仪主机的采样周期内任意时刻t’的磁感应强度,并记录在存储模块中。
8.本发明的有益效果:1、本发明在现有性价比和探测精度较高的质子磁力仪基础上,通过增加感应式磁传感器、gnss和超声波测距仪,将质子磁力仪与感应式磁传感器的优点相结合,并通过数据采集系统对各测量仪器的数据同步采集及简单运算,当飞行速度为10m/s时,可将航磁的航线分辨率从点距20 m提高至0.1 mm,同时还可直接获取航磁所需的实时位置信息和离地高度数据,不仅使得具有较高探测精度的质子磁力仪能够应用于高分辨率的航磁探测工作,而且能丰富航磁基础数据,还能简化航磁装置整体的结构并降低后期数据处理的难度。
9.2、本发明的感应式磁传感器通过将感应式电磁接收线圈固定在环状的非磁性刚性外壳内,非磁性刚性外壳不仅可以起到保护感应式电磁接收线圈的作用,而且其环状外形还能减少飞行过程中接收线圈的风阻,从而减小空中紊流对感应式磁传感器及挂载板上
各仪器的姿态影响,可提高探测数据的有效性。特别是采用非磁性的抗扭绳将挂载板吊挂在无人机下方,可有效减轻乃至杜绝接收线圈及挂载板在飞行过程中的自旋转,从而进一步提高航测数据的有效性。
10.3、本发明通过感应式磁传感器采用非磁性刚性外壳、挂载板为非磁性刚性薄板、抗扭绳为非磁性材质,以及将感应式磁传感器与无人机脚架的间距大于5m等多项措施,可显著降低无人机本身磁场对感应式磁传感器的干扰;而将感应式电磁接收线圈固定在非磁性刚性外壳内,且非磁性刚性外壳及超声波测距仪、gnss天线、质子磁力仪探头均固定在刚性的挂载板上,并采用抗扭绳将挂载板吊挂在无人机下方,都能进一步保持航测平台的稳定性,从而能够进一步提高数据航测数据的有效性。
11.综上所述,本发明具有结构简单、磁测分辨率和探测精度高、航磁基础数据丰富的特点。
附图说明
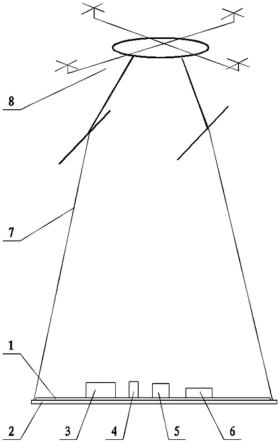
12.图1为本发明基于质子磁力仪的无人机航空磁测装置总体结构示意图;图2为图1的挂载板及其连接结构俯视图;图3为图1的数据采集系统及其连接结构框图;图4为本发明基于质子磁力仪的无人机航空磁测装置的磁测方法流程示意图图中:1-感应式磁传感器,2-挂载板,3-数据采集系统,4-超声波测距仪,5-gnss天线,6-质子磁力仪探头,7-抗扭绳,8-无人机。
实施方式
13.下面结合附图和实施例对本发明作进一步的说明,但不以任何方式对本发明加以限制,基于本发明教导所作的任何变更或改进,均属于本发明的保护范围。
14.如图1、2和3所示,本发明之基于质子磁力仪的无人机航空磁测装置,包括感应式磁传感器1、挂载板2、数据采集系统3、超声波测距仪4、gnss天线5、质子磁力仪探头6,所述感应式磁传感器1包括环状的非磁性刚性外壳、固定设置非磁性刚性外壳内的感应式电磁接收线圈,所述挂载板2为刚性薄板,所述非磁性刚性外壳与挂载板2固定连接,所述数据采集系统3、超声波测距仪4、gnss天线5及质子磁力仪探头6分别固定设置在非磁性刚性外壳内侧的挂载板2上;所述数据采集系统3包括主控模块、存储模块、质子磁力仪主机、gnss主机、数据采集卡,所述感应式电磁接收线圈与数据采集卡连接,所述gnss天线5与gnss主机连接,所述质子磁力仪探头6与质子磁力仪主机连接,所述超声波测距仪4、质子磁力仪主机、gnss主机、数据采集卡分别与主控模块连接,所述主控模块对超声波测距仪4及质子磁力仪主机进行控制,并接收超声波测距仪4、质子磁力仪主机、gnss主机和感应式电磁接收线圈数据并记录于存储模块中。
15.所述感应式磁传感器1中的感应式电磁接收线圈为漆包铜线绕制n圈形成的磁感应圆环,所述超声波测距仪4的发射频率为200 khz且测量频率8~16 hz。
16.所述挂载板2为长方形的非磁性刚性薄板,所述感应式磁传感器1对称固定设置在挂载板2上,所述挂载板2的两端分别通过非磁性的抗扭绳7与无人机8连接。
17.所述感应式磁传感器1的非磁性刚性外壳为pvc环状管或碳纤维环状管,所述非磁性刚性外壳在挂载板2的两侧还对称设置有与无人机8连接的抗扭绳7。
18.所述感应式磁传感器1与无人机8脚架的间距大于5m。
19.所述主控模块对接收到的感应式电磁接收线圈的感应电动势、质子磁力仪主机的磁感应强度进行计算,得到质子磁力仪主机的采样周期内任意时刻t的磁感应强度b,并记录在存储模块中:
20.式中:s为感应式电磁接收线圈的有效面积,单位为m2;n为线圈匝数;b0为质子磁力仪主机在t0时刻的磁感应强度,单位为t;ε为t
’ꢀ
时刻感应式电磁接收线圈的感应电动势,单位为v;t为时间,单位为s。
21.所述质子磁力仪主机的采样周期为2~3s,所述主控模块对感应式电磁接收线圈的采样周期为1/104~1/10
5 s。
22.所述无人机为旋翼无人直升机或固定翼无人机。
23.所述主控模块为plc、工控机或pc机。
24.所述抗扭绳7为非金属绳或铝合金绳。
25.所述挂载板2还设置有供电电池,所述供电电池分别与数据采集系统3、超声波测距仪4及gnss天线5的供电端连接。
26.如图4所示,本发明之基于质子磁力仪的无人机航空磁测装置的磁测方法,包括以下步骤:a、硬件安装:将感应式磁传感器1对称固定在挂载板2上,然后在感应式磁传感器1内侧的挂载板2上分别固定数据采集系统3、超声波测距仪4、gnss天线5及质子磁力仪探头6,随后将挂载板2用非磁性的抗扭绳7与无人机8底部连接;b、信号连接:将感应式磁传感器1的感应式电磁接收线圈与数据采集系统3的数据采集卡连接,gnss天线5与数据采集系统3的gnss主机连接,质子磁力仪探头6与数据采集系统3的质子磁力仪主机连接,超声波测距仪4与数据采集系统3的主控模块连接;c、数据采集:控制飞行器按照设计的航线执行作业,数据采集系统3的主控模块对超声波测距仪4及质子磁力仪主机进行控制,并同步接收超声波测距仪4、质子磁力仪主机、gnss主机和感应式电磁接收线圈的数据并记录于存储模块中;d、数据计算:主控模块对接收到的感应式电磁接收线圈的感应电动势、质子磁力仪主机的磁感应强度进行计算,得到质子磁力仪主机的采样周期内任意时刻t的磁感应强度b,并记录在存储模块中。
27.所述d步骤中,质子磁力仪主机的采样周期内任意时刻t的磁感应强度b为:
28.式中:s为感应式电磁接收线圈的有效面积,单位为m2;n为线圈匝数;b0为质子磁力仪主机在t0时刻的磁感应强度,单位为t;ε为t
’ꢀ
时刻感应式电磁接收线圈的感应电动势,单
位为v;t为时间,单位为s。
29.所述数据采集步骤中,质子磁力仪主机的采样周期为2~3s,主控模块对感应式电磁接收线圈的采样周期为1/104~1/10
5 s;超声波测距仪4的发射频率为200 khz且测量频率8~16 hz,感应式磁传感器1与无人机8脚架的间距大于5m。
实施例
30.如图1至4所示,航测过程如下:1、如图1和2所示,将外壳为环状pvc管且环状内径为1000mm的感应式磁传感器1,使用万能胶或非磁性的细绳捆绑对称固定在长1100 mm、宽100 mm、厚10 mm的矩形木板(即挂载板2)上;随后在感应式磁传感器1内侧的矩形木板上,采用铝合金螺钉固定超声波测距仪4(如得力的120米超声波测距仪)和gnss天线5(如北天公司的gnss碟形天线),并使用非磁性的细绳将数据采集系统3及质子磁力仪探头6(如加拿大gsm-19t质子磁力仪传感器)捆绑固定在矩形木板上;随后采用非磁性的抗扭绳7将挂载板2的两端与无人机8连接,使感应式磁传感器1与无人机8脚架的间距大于5m。
31.2、如图3所示,将感应式磁传感器1的感应式电磁接收线圈与数据采集系统3的数据采集卡(如美国ni公司usb-4431数据采集卡)连接,gnss天线5与数据采集系统3的gnss主机(如北天bt-200接收机)连接,质子磁力仪探头6与数据采集系统3的质子磁力仪主机(如加拿大的gsm-19t主机)连接,超声波测距仪4与数据采集系统3的主控模块连接。
32.3、控制飞行器按照设计的航线执行作业,数据采集系统3的主控模块对超声波测距仪4及质子磁力仪主机进行控制,使超声波测距仪4的发射频率为200 khz且测量频率8~16 hz,并同步接收超声波测距仪4、质子磁力仪主机、gnss主机和感应式电磁接收线圈的数据,并记录于存储模块中。其中,质子磁力仪主机的采样周期为2~3s,感应式电磁接收线圈的采样周期为1/10
5 s。
33.4、数据采集系统3的主控模块对接收到的感应式电磁接收线圈的感应电动势、质子磁力仪主机的磁感应强度进行计算,得到质子磁力仪主机的采样周期内任意时刻t的磁感应强度b,并记录在数据采集系统3的存储模块中:
34.式中:s为感应式电磁接收线圈的有效面积,单位为m2;n为线圈匝数;b0为质子磁力仪主机在t0时刻的磁感应强度,单位为t;ε为t
’ꢀ
时刻感应式电磁接收线圈的感应电动势,单位为v;t为时间,单位为s。
35.航测完成后,通过读取数据采集系统3的存储模块中数据,当飞行速度为10m/s时,可获得点距为0.1 mm航线分辨率的总磁感应强度数据,与单一应用质子磁力仪相比,分辨率提升了20万倍;同时,gnss和超声波测距仪还可同步直接提供位置信息和离地高度信息。分辨率的提升以及定位数据和离地高度数据的补充,可使质子磁力仪也能够满足航磁的基础数据采集要求。
36.以上所述仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,
都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1