基于光学陀螺测角仪的多位置偏置标定方法
本发明涉及光学陀螺测角仪的测角误差补偿领域,具体涉及一种基于光学陀螺测角仪的多位置偏置标定方法。
背景技术:
1、角度计量是几何量计量技术的重要组成部分,随着科技的发展和社会生产力水平的提高,角度计量广泛应用于生产生活的各个方面,目前角度计量的精度仍在不断提高。在许多角度测量方法中,目前应用最广泛的是光学角度测量方法;光学角度测量方法有着非接触、高准确度和高灵敏度的特点。常用的光学角度测量方法有:自准直法、激光干涉法、圆光栅法等等。在这些光学角度测量方法中,激光干涉法只适用于对小角度进行高精度的测量;自准直仪法由于需要搭配多面棱体使用,但是受限于多面棱体的面数,不能进行任意角度测量;针对上述仪器的缺点以及对动态测角的需求,于是提出了环形激光法。环形激光法可以实现角度在360°范围内高精度、高分辨率测量。光学陀螺测角仪就是使用环形激光法进行角度测量的仪器。光学陀螺测角仪是基于sagnac效应研制,sagnac效应是指一束光经过分光镜分为两束后进入环形腔体内,一束光沿环形腔体顺时针运动,另一束光沿环形腔体逆时针运动,当环形腔体静止时,这两束光相遇时没有光程差;当环形腔体运动时,这两束光相遇时产生光程差。光学陀螺测角仪就是利用这对光束之间的光程差敏感被测物体旋转角速度并进行积分得到角位移。综上所述,光学陀螺测角仪相比于其它角度测量仪器有很多优势:1、安装简单,没有同轴度安装要求,且无需调节光路;2、动态性能好,适用于实时角度测量;3、可以实现任意角度测量。这些优势使得光学陀螺测角仪向角度计量现场校准和动态角度测量方向发展。
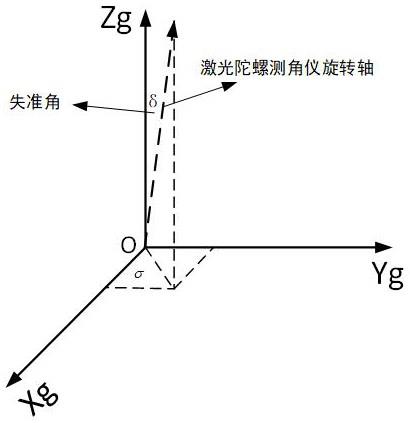
2、目前,随着各种工艺技术的发展成熟和闭锁等重大技术问题的突破,国内研制的光学陀螺的精度和国外相比精度相当,在实验室环境下,光学陀螺测角仪的测角误差已经低于0.3″。理想情况下,光学陀螺测角仪在静止的情况下,光学陀螺测角仪输出的脉冲数应该为零,然而由于地球自转,环境噪声,被测物的机械抖动以及光学陀螺测角仪失准角(光学陀螺测角仪的敏感轴与光学陀螺测角仪的回转轴之间的夹角)的影响,光学陀螺测角仪输出的偏置脉冲数不为零,从而产生偏置。在进行角度测量时,偏置不仅体现了光学陀螺测角仪的稳定性,也体现了外界环境对光学陀螺测角仪的影响。通常取单位时间内的脉冲数的均值作为此刻偏置数。
3、然而,在实际使用光学陀螺测角仪进行角度测量时,只在旋转机构任意角位置处进行一次偏置标定后,在测量过程中就不再进行偏置标定。但是,由于地球自转,环境噪声,被测物的机械抖动以及光学陀螺测角仪失准角的影响,光学陀螺测角仪在旋转机构不同角位置处的偏置值不同;而光学陀螺测角仪在进行角度计算的过程中,偏置值的不同会对计算的角度值产生影响,从而光学陀螺测角仪就会产生角度测量误差。在高精度角度计量领域,在旋转机构不同角位置处光学陀螺测角仪的偏置值不同所产生的角度测量误差对高精度角度计量的影响不可忽略。
4、综上所述,随着科学技术的发展,光学陀螺测角仪开始广泛应用于角度计量方面,但光学陀螺测角仪在进行角度测量时,未消除旋转机构在不同角位置处时光学陀螺测角仪不同偏置值带来的角度测量误差,为了解决光学陀螺测角仪在角度测量过程中由于不同偏置值产生的角度测量误差这一问题,本发明提出了一种基于光学陀螺测角仪的多位置偏置标定方法,可以有效提高光学陀螺测角仪的测角精度。
技术实现思路
1、针对现有技术的不足,本发明提出了一种操作简单、补偿精度高的角度测量方法,即一种基于光学陀螺测角仪的多位置偏置标定方法。
2、本发明主要技术构思:将谐波分析法和光学陀螺测角仪的多位置偏置标定相结合,利用傅里叶原理完成对光学陀螺测角仪多位置偏置标定数据的拟合,从而提高光学陀螺测角仪的测角精度,实现角位置误差补偿。
3、本发明的具体技术方案是:
4、s1:将光学陀螺测角仪固定于旋转机构工作面的中心位置上,对光学陀螺测角仪进行上电、预热15分钟,标定刻度系数p。
5、s2:使用基于光学陀螺测角仪的多位置偏置标定方法对光学陀螺测角仪在旋转机构不同角位置处进行偏置标定。
6、s3:利用基于傅里叶变换理论的谐波分析法分析s2中采集的光学陀螺测角仪多位置偏置标定的离散数据;将采集的离散数据通过傅里叶级数来表示,同时计算得到各阶次谐波分量的幅值、频率和相位。
7、s4:依据s3步骤中解算出的光学陀螺测角仪多位置偏置标定谐波函数的各阶谐波的幅值、频率和相位,将各阶次谐波函数进行叠加,离散的多位置偏置补偿函数拟合为连续的多位置偏置补偿函数,最终拟合得到光学陀螺测角仪多位置偏置补偿函数b'(θ)。
8、s5:依据s4步骤中拟合的光学陀螺测角仪多位置偏置补偿函数b'(θ),对光学陀螺测角仪的角度测量值进行离线补偿。
9、本发明具有如下优点:
10、1、本发明补偿原理简单,操作方便,只需在光学陀螺进行角度测量的过程中,在每一个目标点处停留20s(时间非固定);等整圆周数据采集完成后,通过判断脉冲数的变化,分别计算出陀螺的转动量以及各角位置的偏置值;通过对偏置值进行傅里叶变换即可得到各位置的偏置值,进而对光学陀螺的测量值进行补偿。
11、2、可以有效的提高光学陀螺的测量精度。根据起始点的不同,光学陀螺的测量精度最大可提高p·(bmax-bmin),最小可提高p·(bmax-bmin)/2,可以实现全圆范围内偏置脉冲的补偿,通过傅里叶变换将离散的偏置值变成连续的偏置值,进而可以得到全圆范围各位置的偏置值。
12、3、适用范围广,适用于大部分光学陀螺测角仪测角精度的提高。
技术特征:
1.一种基于光学陀螺测角仪的多位置偏置标定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于光学陀螺测角仪的多位置偏置标定方法,其特征在于,在步骤s1中,所述刻度系数p的标定步骤如下:
3.根据权利要求1所述的一种基于光学陀螺测角仪的多位置偏置标定方法,其特征在于,在步骤s2中,所述光学陀螺测角仪多位置偏置标定步骤如下:
4.根据权利要求1所述的一种基于光学陀螺测角仪的多位置偏置标定方法,其特征在于,在步骤s3中,利用谐波分析法对采集数据进行分析的步骤如下:
5.根据权利要求4所述的一种基于光学陀螺测角仪的多位置偏置标定方法,其特征在于,在步骤s4中,最终确定拟合的光学陀螺测角仪多位置偏置补偿函数b'(θ)表示如下:
6.根据权利要求5所述的一种基于光学陀螺测角仪的多位置偏置标定方法,其特征在于,在步骤s5中,对光学陀螺测角仪的角度测量值进行离线补偿,所述离线补偿公式如下:
技术总结
本发明公开了一种基于光学陀螺测角仪的多位置偏置标定方法,包括:首先将光学陀螺测角仪固定于旋转机构的工作台面中心位置上,光学陀螺测角仪上电预热、进行刻度系数标定。其次,设置待测转台转速和固定的步长,以气浮转台的绝对零位为起始点,转台每转动一个步长就对光学陀螺测角仪进行偏置标定并记录数据。然后,利用基于傅里叶法的谐波分析法对采集的数据进行分析,得到光学陀螺测角仪多位置偏置标定数据的各阶次谐波的幅值和相位。最后,通过各阶次谐波的幅值和相位,将离散的多位置偏置标定数据拟合成连续的多位置偏置补偿函数,利用获取的多位置偏置补偿函数对光学陀螺测角仪的测角误差进行离线补偿。本发明实现简单,与传统的偏置标定方法相比光学陀螺测角仪的测量精度进一步提高。
技术研发人员:季岚青,朱维斌,邹伟,黄垚,薛梓
受保护的技术使用者:中国计量大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!