一种自动化泊车测试方法、装置以及系统与流程
本申请涉及自动泊车,更具体地,涉及一种自动化泊车测试方法、装置以及系统。
背景技术:
1、自动泊车辅助系统是指车辆根据自身传感器感知周围停车位,通常包含超声波雷达、摄像头等,当探测到符合要求的车位后,通过内部算法规划泊车路径,车辆控制车辆横向、纵向模块,自动泊入停车位的系统。目前量产较多的包含半自动泊车系统、自动泊车系统、遥控泊车系统等。
2、自动泊车辅助系统可以帮助新手司机快捷而方便的将车泊入适当的停车位上,对新手司机来说是“福音”。但是由于自动泊车辅助系统技术还未成熟,还有需要改进的地方。因此在系统开发阶段,需要经过大量的测试,通常的做法是将自动泊车辅助系统泊车指标与“老司机”进行对标,以追求更好的用户体验。
3、自动泊车辅助系统将车辆泊入车位后,技术人员需要对泊入后试验车辆的位姿进行评价,目前是直接通过人工找出车身前、后、左、右侧的外沿参考点,用手工拉皮尺的方式去测量车身四周距离边界的距离,之后利用测量的距离,通过算术公式计算出泊入后的车身倾斜角度。
4、但是,手工测量的方式读取车身数据费时费力,通常需要一边测量,一边记录数据,一般需要两人一组才能较快的完成,效率较低,并且人工测量降低了测试的准确率。
技术实现思路
1、本申请提供一种自动化泊车测试方法、装置以及系统,通过相机、感应器获得车位和泊车完成后的车辆信息,依此获得车辆的位姿信息,实现对泊车性能的评价,代替人工测量,提高了测试效率和测试准确度。
2、本申请提供了一种自动化泊车测试方法,包括:
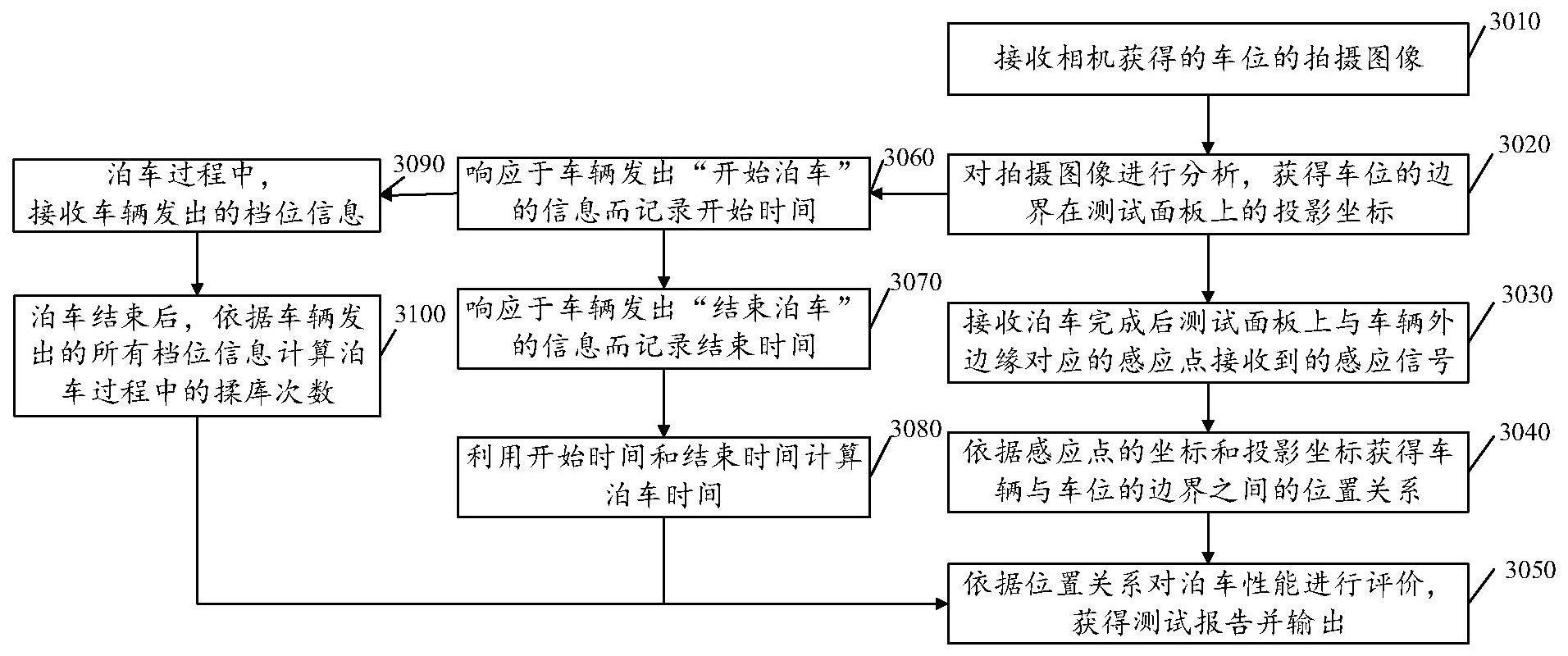
3、接收车位的拍摄图像;
4、对拍摄图像进行分析,获得车位的边界在测试面板上的投影坐标;
5、接收泊车完成后测试面板上与车辆外边缘对应的感应点接收到的感应信号;
6、依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系;
7、依据位置关系对泊车性能进行评价;
8、其中,测试面板覆盖在车位的正上方,测试面板的底面上排布多个感应点,车辆的外边缘上设有多个竖直向上发射感应信号的发射器。
9、优选地,拍摄车位的相机内嵌在测试面板的底面上。
10、优选地,依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系,具体包括:
11、计算车辆的前保险杠最外沿对应的感应点的坐标与车位的前边界线之间的第一距离以及车辆的后保险杠最外沿对应的感应点的坐标与车位的后边界线之间的第二距离;
12、分别计算车辆的左前轮和左后轮对应的感应点的坐标与车位的左边界线之间的第三距离和第四距离,并分别计算车辆的右前轮和右后轮对应的感应点的坐标与车位的右边界线之间的第五距离和第六距离;
13、分别计算车辆的左前轮与左后轮的横坐标的差值和纵坐标的差值,或分别计算车辆的右前轮与右后轮的横坐标的差值和纵坐标的差值,作为第一差值和第二差值;
14、依据第一距离、第二距离、第三距离、第四距离、第五距离、第六距离、第一差值以及第二差值确定车辆对于车位的姿态,作为车辆与车位的边界之间的位置关系。
15、优选地,自动化泊车测试方法还包括:
16、响应于车辆开始泊车而记录开始时间;
17、响应于车辆结束泊车而记录结束时间;
18、利用开始时间和结束时间计算泊车时间。
19、优选地,自动化泊车测试方法还包括:
20、泊车过程中,接收车辆发出的档位信息;
21、泊车结束后,依据车辆发出的所有档位信息计算泊车过程中的揉库次数。
22、本申请还提供一种自动化泊车测试装置,包括图像接收模块、图像分析模块、感应信号接收模块、位置关系获得模块以及评价模块;
23、图像接收模块用于接收车位的拍摄图像;
24、图像分析模块用于对拍摄图像进行分析,获得车位的边界在测试面板上的投影坐标;
25、感应信号接收模块用于接收泊车完成后测试面板上与车辆外边缘对应的感应点接收到的感应信号;
26、位置关系获得模块用于依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系;
27、评价模块用于依据位置关系对泊车性能进行评价;
28、其中,测试面板覆盖在车位的正上方,测试面板上排布多个感应点,车辆的外边缘上设有多个竖直向上发射的感应信号发射器。
29、优选地,位置关系获得模块包括前后距离计算模块、左右距离计算模块、倾斜角计算模块以及位姿获得模块;
30、前后距离计算模块用于计算车辆的前保险杠最外沿对应的感应点的坐标与车位的前边界线之间的第一距离以及车辆的后保险杠最外沿对应的感应点的坐标与车位的后边界线之间的第二距离;
31、左右距离计算模块用于分别计算车辆的左前轮和左后轮对应的感应点的坐标与车位的左边界线之间的第三距离和第四距离,并分别计算车辆的右前轮和右后轮对应的感应点的坐标与车位的右边界线之间的第五距离和第六距离;
32、倾斜角计算模块用于分别计算车辆的左前轮与左后轮的横坐标的差值和纵坐标的差值,或分别计算车辆的右前轮与右后轮的横坐标的差值和纵坐标的差值,作为第一差值和第二差值;
33、位姿获得模块用于依据第一距离、第二距离、第三距离、第四距离、第五距离、第六距离、第一差值以及第二差值确定车辆对于车位的姿态,作为车辆与车位的边界之间的位置关系。
34、优选地,自动化泊车测试装置还包括记录模块和泊车时间计算模块;
35、记录模块用于响应于车辆开始泊车而记录开始时间,并响应于车辆结束泊车而记录结束时间;
36、泊车时间计算模块用于利用开始时间和结束时间计算泊车时间。
37、优选地,自动化泊车测试装置还包括档位信息接收模块以及揉库次数计算模块;
38、档位信息接收模块用于在泊车过程中,接收车辆发出的档位信息;
39、揉库次数计算模块用于依据车辆发出的所有档位信息计算泊车过程中的揉库次数。
40、本申请还提供一种自动化泊车测试系统,包括测试组件和上位机,测试组件包括设置于车位正上方的测试面板和相机,上位机用于执行上述的自动化泊车测试方法。
41、通过以下参照附图对本申请的示例性实施例的详细描述,本申请的其它特征及其优点将会变得清楚。
技术特征:
1.一种自动化泊车测试方法,其特征在于,包括:
2.根据权利要求1所述的自动化泊车测试方法,其特征在于,拍摄车位的相机内嵌在所述测试面板的底面上。
3.根据权利要求1所述的自动化泊车测试方法,其特征在于,依据所述感应点的坐标和所述投影坐标获得车辆与车位的边界之间的位置关系,具体包括:
4.根据权利要求1所述的自动化泊车测试方法,其特征在于,还包括:
5.根据权利要求1或4所述的自动化泊车测试方法,其特征在于,还包括:
6.一种自动化泊车测试装置,其特征在于,包括图像接收模块、图像分析模块、感应信号接收模块、位置关系获得模块以及评价模块;
7.根据权利要求6所述的自动化泊车测试装置,其特征在于,所述位置关系获得模块包括前后距离计算模块、左右距离计算模块、倾斜角计算模块以及位姿获得模块;
8.根据权利要求6所述的自动化泊车测试装置,其特征在于,还包括记录模块和泊车时间计算模块;
9.根据权利要求6或8所述的自动化泊车测试装置,其特征在于,还包括档位信息接收模块以及揉库次数计算模块;
10.一种自动化泊车测试系统,其特征在于,包括测试组件和上位机,所述测试组件包括设置于车位正上方的测试面板和相机,所述上位机用于执行权利要求1-5中任一项所述的自动化泊车测试方法。
技术总结
本申请公开了一种自动化泊车测试方法、装置以及系统,自动化泊车测试方法包括:接收车位的拍摄图像;对拍摄图像进行分析,获得车位的边界在测试面板上的投影坐标;接收泊车完成后测试面板上与车辆外边缘对应的感应点接收到的感应信号;依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系;依据位置关系对泊车性能进行评价;其中,测试面板覆盖在车位的正上方,测试面板的底面上排布多个感应点,车辆的外边缘上设有多个竖直向上发射感应信号的发射器。本申请通过相机、感应器获得车位和泊车完成后的车辆信息,依此获得车辆的位姿信息,实现对泊车性能的评价,代替人工测量,提高了测试效率和测试准确度。
技术研发人员:夏文娟,张雷,尚红标,束照坤,吴向东,尹苏北,高源雪
受保护的技术使用者:安徽江淮汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!