一种基于雷达的风机叶片净空距离计算方法与流程
1.本发明涉及风力发电领域,具体涉及一种基于雷达的风机叶片净空距离计算方法。
背景技术:
2.随着风电技术的不断进步和趋于成熟,风电机组由早期的1.5mw机组,逐步发展成了3mw~11mw等大型机组,配套的叶片也广泛应用更长的叶片,国内目前使用最长叶片直径为203米,并且早期安装的10年以上老旧机组,当前广泛开展更换长叶片的提质增效的技改方案,广泛使用长叶片需要重点监测叶片旋转过程中,叶尖部分距离塔筒的最小净空距离,避免在一些特殊风况,机组出现叶片扫塔筒而危及机组安全的情况出现。
3.现有技术中,由于激光受雨雾影响较大,现在叶片净空距离的主流技术路线为微波雷达监测,使用微波雷达进行风力发电机叶片净空监测时,一般需要使用多个微波雷达才能保证对叶尖的完全覆盖,虽然多个微波雷达可以对叶尖进行完全覆盖,但会带来多个监测值的问题,即可能同时有多个微波雷达都监测到了叶尖,而现有方法都没有较好的解决如何从这些值中选取可靠的值,一般都是直接采用这些值中的最小值替代,但是,测得的最小值并不一定是叶尖距塔筒的最近距离。
4.因此,为准确掌握叶片净空距离的变化情况,现场急需一种精确、可靠的基于雷达的风机叶片净空距离计算方法以解决上述问题。
技术实现要素:
5.本发明目的在于提供一种基于雷达的风机叶片净空距离计算方法,以解决现有技术中多个雷达进行监测时的多值问题,具体技术方案如下:一种基于雷达的风机叶片净空距离计算方法,包括如下步骤:步骤s1:在风机的同一高度位置安装个雷达用于监测叶片净空距离;步骤s2:获取个雷达中监测到的距叶片的距离监测值,,然后将雷达的监测值转换为雷达距叶片的水平距离,步骤s3:根据相邻两个雷达测得的水平距离计算塔筒到叶片的净空距离,;步骤s4:将计算得到的塔筒到叶片的净空距离进行加权平均得到最终的净空距离。
6.以上技术方案优选的,所述步骤s1中,所述风机的同一高度位置包括塔筒底部、塔筒顶部以及机舱。
7.以上技术方案优选的,所述步骤s1中,一共在风机上安装不少于4个微波雷达。
8.以上技术方案优选的,所述步骤s1中,个雷达沿水平周向等角度设置在风机塔筒上。
9.以上技术方案优选的,所述步骤s2中,雷达距叶片的水平距离如式1)所示: 1);其中,为雷达发射方向与塔筒的夹角。
10.以上技术方案优选的,所述步骤s3中,塔筒到叶片的净空距离如式2)所示: 2);其中,为塔筒中心到叶片转动轨迹在水平面上的投影线的垂线距离;为塔筒半径。
11.以上技术方案优选的,如式2.1)所示:2.1);其中,表示雷达距叶片的水平距离;为叶片从雷达对应的位置转动到雷达对应的位置的轨迹在水平面上的投影线的长度;表示相邻的两个雷达和雷达之间的水平夹角。
12.以上技术方案优选的,如式2.2)所示:2.2)。
13.以上技术方案优选的,步骤s4中,最终的净空距离如式3)所示:3);其中,表示净空距离对应的权重。
14.以上技术方案优选的,式3)中,如式3.1)所示: 3.1)。
15.应用本发明的技术方案,具有以下有益效果:(1)本发明中基于雷达的风机叶片净空距离计算方法,根据雷达(即微波雷达)安装的位置、姿态和监测值,充分利用塔筒、叶片和微波雷达之间的几何关系,将微波雷达测得的多个值转换成单个的,更接近现场实际情况的风机叶片净空距离值,且本方法的计算方法理论严密,便于实现,能够简单的、高效的、精确的计算出多个微波雷达监测情况下的风机叶片净空距离值,可以为风机叶片净空距离监测提供重要的技术支撑。
16.(2)本发明中通过引入权重提高监测精度,即赋予叶片正对塔筒时的观测值更高的权重可以有效监测到湍流、强风等恶劣环境下的真实、准确的叶片距塔筒的净空距离,可提前对过小净空值进行预警,避免扫塔事故发生。
17.本发明除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
18.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
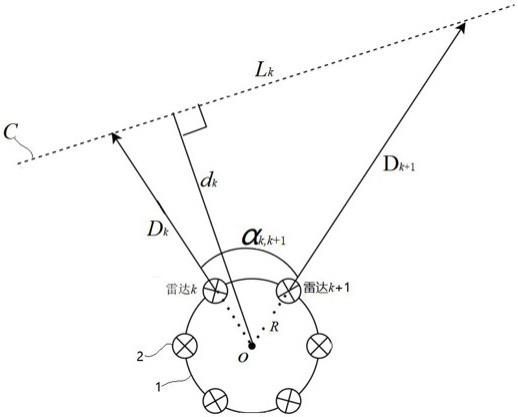
19.在附图中:图1是本实施例中风机叶片净空距离计算方法的计算原理图;图2是本实施例中雷达安装在塔筒上不同位置时的测量值转换为水平距离的示意图,(a)表示雷达安装在塔筒的顶部,(b)表示雷达安装在塔筒的底部;图3是本实施例中雷达的现场安装示意图;其中,1、塔筒;2、雷达;3、叶片。
具体实施方式
20.以下结合附图对本发明的实施例进行详细说明,但是本发明可以根据权利要求限定和覆盖的多种不同方式实施。
实施例
21.本实施例公开一种基于雷达的风机叶片净空距离计算方法,包括如下步骤s1至步骤s4,如图1至图3所示,具体如下:步骤s1:如图2和图3所示,在风机的同一高度位置安装个雷达用于监测叶片净空距离,具体是:本实施例中共有6或8个雷达(优选为微波雷达,本实施例优选6个),6个雷达沿水平周向(即绕塔筒的中轴线)等角度设置在风机上,此处的等角度即在周向均匀分布,周向相邻的两个微波雷达之间的水平夹角为(此处水平夹角通过计算或现场测量即可得到)。
22.本实施例中的6个雷达均安装在风机上的同一高度位置,此处的同一高度位置包括塔筒底部、塔筒顶部以及机舱,如图2所示,本实施例中优选6个雷达均倾斜安装在塔筒底部或者是6个雷达均倾斜安装在塔筒顶部上。图2中的表示整个塔筒的高度。
23.参见图1,需要定义以下字符:表示微波雷达安装高度处的塔筒半径,其通过现场
测量或设计图纸即可得到;表示塔筒的中心点;表示叶片转动轨迹在水平面的投影。
24.步骤s2:本步骤s2包括步骤s2.1以及步骤s2.2,具体如下:步骤s2.1:如图1所示,获取个雷达中监测到的距叶片的距离监测值,,进一步来说就是,在个雷达中,可能存在多个雷达探测到了叶片的叶尖,获取这些雷达监测到的距叶片的距离监测值。
25.步骤s2.2:将雷达的监测值转换为雷达距叶片的水平距离,此步骤s2.2是将各雷达监测到的监测值转换为水平距离,如式1)所示: 1);其中,为微波雷达的微波发射方向与塔筒的夹角(如图2所示)。
26.步骤s3:根据相邻两个雷达测得的水平距离计算塔筒到叶片的净空距离,,具体如式2)所示: 2);其中,为塔筒中心到叶片转动轨迹在水平面上的投影线的垂线距离;为塔筒半径(微波雷达安装高度处的塔筒半径);在式2)中,的计算如式2.1)所示:2.1);其中,表示雷达距叶片的水平距离;为叶片从雷达对应的位置转动到雷达对应的位置的轨迹在水平面上的投影线的长度(此处的投影线参见图1所示);表示相邻的两个雷达和雷达之间的水平夹角。
27.在式2)中,如式2.2)所示: 2.2)。
28.步骤s4:将计算得到的塔筒到叶片的净空距离进行加权平均得到最终的净空距离,如式3)所示:
3);其中,表示净空距离对应的权重,进一步的,的计算如式3.1)所示: 3.1)。
29.本实施例中通过加权平均得到最终的净空距离,能够解决多个雷达同时监测到叶尖的选值问题,即能够更加精准的计算得到最终的净空距离。
30.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1