一种用于磁性接近传感器的控制方法与流程
本发明涉及磁性接近传感器,尤其涉及一种用于磁性接近传感器的控制方法。
背景技术:
1、磁性接近传感器通常用于工业机械设备及自动化生产线,起到限位保护、定位监测等作用。磁性接近传感器是利用磁性物接近驱动感应元件——干簧管,根据干簧管的通断来输出高低电平信号,但这种磁性接近传感器,不能识别外部的电磁干扰、或是感应元件等环境变化造成误判误检,设备在使用上存在安全隐患。
技术实现思路
1、本发明所要解决的技术问题是:提供一种用于磁性接近传感器的控制方法,能够有效避免电磁干扰等环境变化造成误判误检。
2、为了解决上述技术问题,本发明采用的技术方案为:
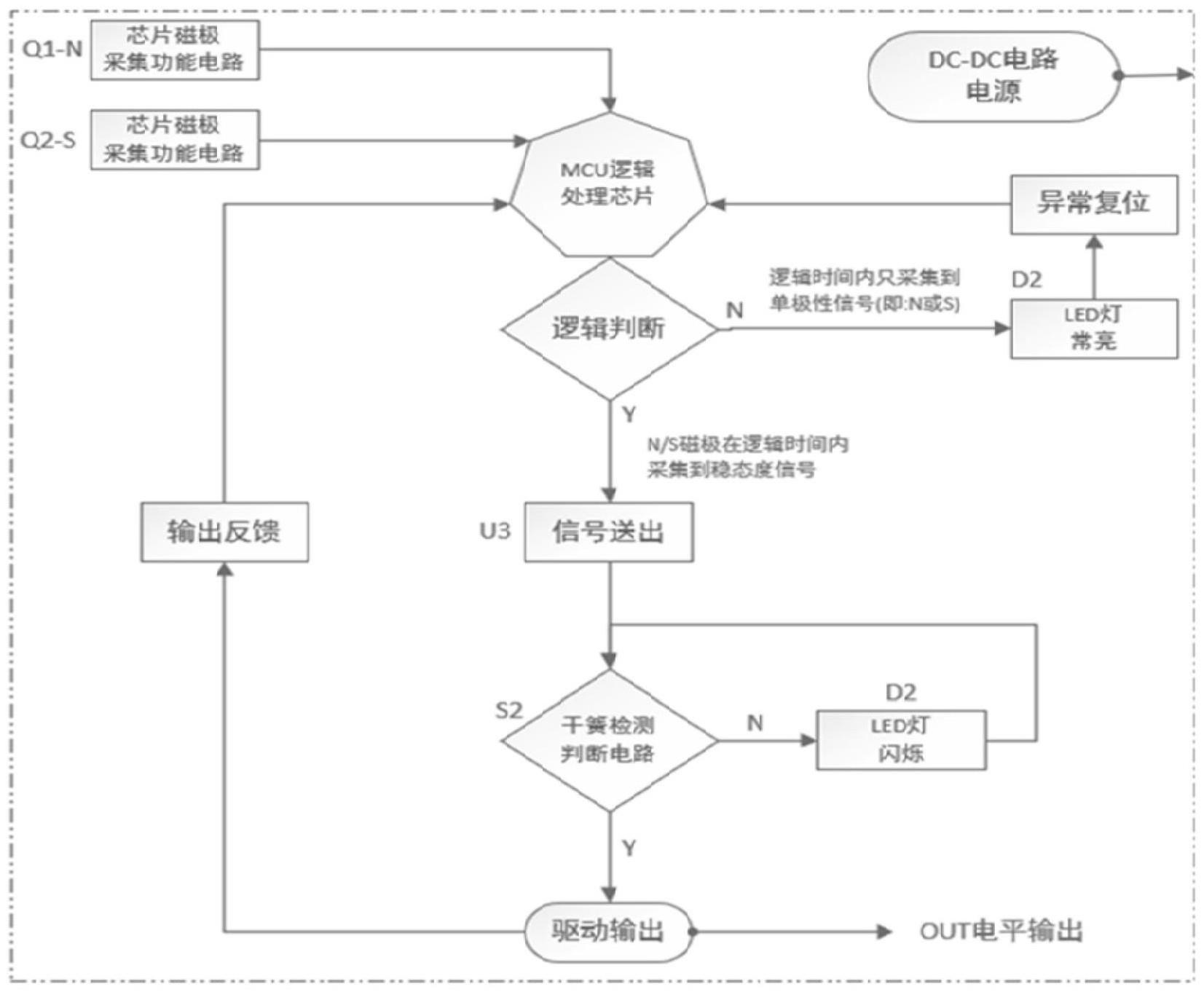
3、一种用于磁性接近传感器的控制方法,包括以下步骤:
4、s1、采集n极采集单元和s极采集单元的信号输出端,并判断是否均采集到第一有效信号;
5、s2、若均采集到第一有效信号,则发出驱动信号至干簧管检测电路后,判断所述干簧管检测电路是否输出第二有效信号;
6、s3、若所述干簧管检测电路输出第二有效信号,则发出用于控制执行的控制信号。
7、本发明的有益效果在于:
8、本发明提供的一种用于磁性接近传感器的控制方法,通过在判断干簧管检测电路是否输出第二有效信号之前先判断n极采集单元和s极采集单元的信号输出端是否均采集到第一有效信号,即只有当均采集到第一有效信号,才发出驱动信号至干簧管检测电路,并且有且仅有两种检测都满足条件的情况下,才发出用于控制执行的控制信号。利用两种检测相结合的方式共同作为系统的判断依据,能够有效提升识别检测稳定性,避免因电磁干扰等环境变化造成误判误检。
技术特征:
1.一种用于磁性接近传感器的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于磁性接近传感器的控制方法,其特征在于,步骤s1具体为:
3.根据权利要求2所述的一种用于磁性接近传感器的控制方法,其特征在于,步骤s2还包括:
4.根据权利要求3所述的一种用于磁性接近传感器的控制方法,其特征在于,步骤s2还包括:
5.根据权利要求1所述的一种用于磁性接近传感器的控制方法,其特征在于,步骤s3还包括:
技术总结
本发明涉及磁性接近传感器技术领域,尤其涉及一种用于磁性接近传感器的控制方法。通过在判断干簧管检测电路是否输出第二有效信号之前先判断N极采集单元和S极采集单元的信号输出端是否均采集到第一有效信号,即只有当均采集到第一有效信号,才发出驱动信号至干簧管检测电路,并且有且仅有两种检测都满足条件的情况下,才发出用于控制执行的控制信号。利用两种检测相结合的方式共同作为系统的判断依据,能够有效提升识别检测稳定性,避免因电磁干扰等环境变化造成误判误检。
技术研发人员:林玉华,陈育杰,王生才,林承术
受保护的技术使用者:欧耐安电子科技(福州)有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!