一种用于光电吊舱瞄准线稳定方法及装置、电子设备与流程
本发明涉及光电吊舱,尤其涉及一种用于光电吊舱瞄准线稳定方法及装置、电子设备。
背景技术:
1、光电吊舱是直升机、无人机和其他飞行器的重要载荷之一,在侦察监视、探测识别等方面发挥重要作用。视轴稳定是光电吊舱的关键功能之一。当光电吊舱工作在惯性模式时,其视轴瞄准线的空间角度保持稳定,不受载机或基座姿态变化的影响,可长时间瞄准感兴趣的目标区域进行观察。此功能主要依靠伺服稳定控制系统与陀螺系统相配合实现。
2、但是,温度变化、噪声干扰等因素会影响陀螺系统的精度,导致陀螺输出的信号量发生漂移。受此影响,光电吊舱的瞄准线会发生微小偏移,随着时间的推移,瞄准线会逐渐偏离初始瞄准的目标区域,使目标区域逐渐偏离视场中心,甚至移出视场,导致目标丢失。瞄准线漂移不仅降低了光电吊舱的使用性能,影响稳定瞄准的效果,也会在锁定跟踪、目标定位等功能中引入误差,甚至会对后续的激光指示、火控引导等功能产生不利影响。
3、并且,抑制瞄准线漂移的主要方法之一是提高陀螺系统的精度和稳定性,同时降低伺服稳定控制系统的调校误差。但前者需要付出高昂的成本,后者则难以准确、定量地测量,导致无法彻底解决瞄准线漂移问题。
4、除此之外,通常用于抑制瞄准线漂移的方法是手动调整校正环路上的进给系统,通过人工输入一定的补偿量,使伺服稳定控制系统向着漂移的反方向运动,从而抵消陀螺漂移。但这种手动调节方法存在几方面的缺点。第一,手动调节的操作繁琐,费时费力,要求操控者具有一定的经验;第二,手动调节依靠人眼判断调节效果,由于不同人的经验不同,判断会有差异,导致调节效果不一致,且精度不高;第三,对陀螺反馈系统进行频繁的人工调整也容易破坏系统的稳定裕度,可能导致电路失控。
5、综上,现有的光电吊舱瞄准线稳定技术具有以下缺点:
6、(1)手动补偿仍然是最常用的方法,但操作过程繁琐,操作难度较大,补偿效果因人而异,难以达到较高的精度;
7、(2)通过读取伺服框架角速度或陀螺输出角速度数据进行自动漂移补偿的方法,对数据本身的信噪比和准确度有较高的要求,除非采用高成本、高性能的硬件设备,否则补偿精度会在较大程度上受到误差和噪声的影响;
8、(3)利用自动跟踪进行补偿的方法对于不具备自动跟踪功能,或自动跟踪性能不高的设备无法适用;
9、(4)利用图像特征点匹配进行补偿的方法计算量大,且对背景环境、目标特征和成像效果有较高的要求,容易受到外部干扰。
技术实现思路
1、本发明要解决的技术问题是,提供一种用于光电吊舱瞄准线稳定方法及装置、电子设备。
2、本发明采用的技术方案是,一种用于光电吊舱瞄准线稳定方法,包括:
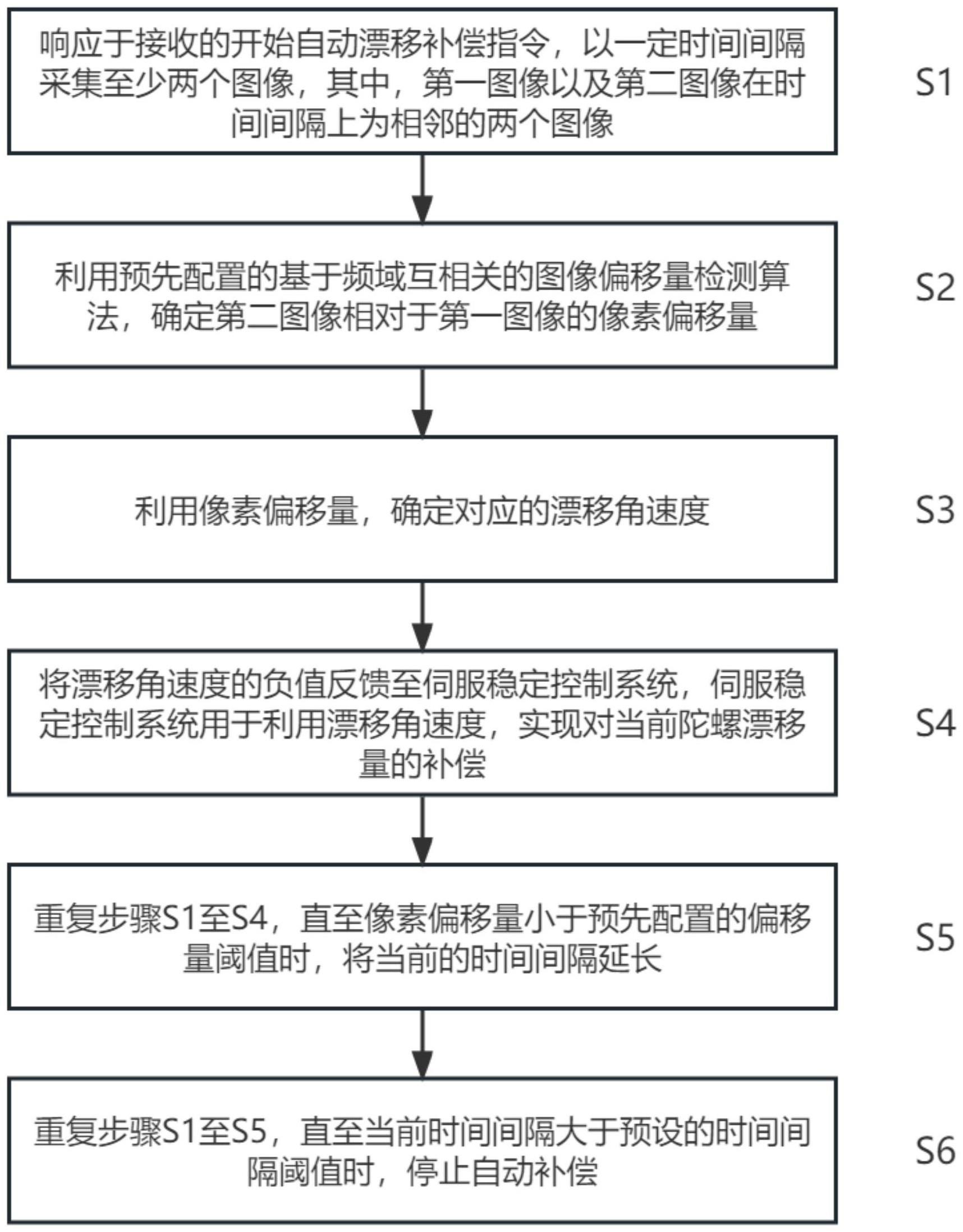
3、步骤s1,响应于接收的开始自动漂移补偿指令,以一定时间间隔采集至少两个图像,其中,第一图像i1以及第二图像i2在所述时间间隔上为相邻的两个图像;
4、步骤s2,利用预先配置的基于频域互相关的图像偏移量检测算法,确定所述第二图像i2相对于所述第一图像i1的像素偏移量;
5、步骤s3,利用所述像素偏移量,确定对应的漂移角速度;
6、步骤s4,将所述漂移角速度的负值反馈至伺服稳定控制系统,所述伺服稳定控制系统用于利用所述漂移角速度,实现对当前陀螺漂移量的补偿;
7、步骤s5,重复步骤s1至s4,直至所述像素偏移量小于预先配置的偏移量阈值时,将当前的所述时间间隔延长;
8、步骤s6,重复步骤s1至s5,直至当前时间间隔大于预设的时间间隔阈值时,停止自动补偿。
9、在一个实施方式中,所述步骤1之前,还包括准备处理,所述准备处理包括:
10、将光电吊舱启动后,切换至惯性模式并静态放置,将所述光电吊舱的相机调至长焦状态,将镜头对准一固定场景,并发送所述开始自动漂移补偿指令。
11、在一个实施方式中,所述步骤s2包括:
12、利用所述第一图像i1以及所述第二图像i2,分别确定对应的第一频谱s1以及第二频谱s2;
13、基于所述第一频谱s1以及所述第二频谱s2,确定所述第一图像i1以及所述第二图像i2的互功率谱h;
14、将所述互功率谱h转换到空间域,得到两幅图像的互相关函数h,其中,所述互相关函数h为二维脉冲尖峰型分布;
15、提取所述互相关函数h的峰值的幅度p,并确定对应峰值点与原点之间的横向、纵向距离;
16、当所述幅度p大于预先配置的幅度阈值时,将所述横向、纵向距离确定为所述像素偏移量,当所述幅度p不大于预先配置的幅度阈值时,所述像素偏移量被确定为0。
17、本发明的另一方面提供了一种用于光电吊舱瞄准线稳定装置,包括:
18、采集模块,被配置为响应于接收的开始自动漂移补偿指令,以一定时间间隔采集至少两个图像,其中,第一图像i1以及第二图像i2在所述时间间隔上为相邻的两个图像;
19、偏移量检测模块,被配置为利用预先配置的基于频域互相关的图像偏移量检测算法,确定所述第二图像i2相对于所述第一图像i1的像素偏移量;
20、漂移角速度计算模块,被配置为利用所述像素偏移量,确定对应的漂移角速度;
21、反馈模块,被配置为将所述漂移角速度的负值反馈至伺服稳定控制系统,所述伺服稳定控制系统用于利用所述漂移角速度,实现对当前陀螺漂移量的补偿;
22、第一迭代模块,被配置为重复步骤s1至s4,直至所述像素偏移量小于预先配置的偏移量阈值时,将当前的所述时间间隔延长;
23、第二迭代模块,被配置为重复步骤s1至s5,直至当前时间间隔大于预设的时间间隔阈值时,停止自动补偿。
24、在一个实施方式中,所述用于光电吊舱瞄准线稳定装置被进一步配置为:将光电吊舱启动后,切换至惯性模式并静态放置,将所述光电吊舱的相机调至长焦状态,将镜头对准一固定场景,并发送所述开始自动漂移补偿指令。
25、在一个实施方式中,所述偏移量检测模块被进一步配置为:
26、利用所述第一图像i1以及所述第二图像i2,分别确定对应的第一频谱s1以及第二频谱s2;
27、基于所述第一频谱s1以及所述第二频谱s2,确定所述第一图像i1以及所述第二图像i2的互功率谱h;
28、将所述互功率谱h转换到空间域,得到两幅图像的互相关函数h,其中,所述互相关函数h为二维脉冲尖峰型分布;
29、提取所述互相关函数h的峰值的幅度p,并确定对应峰值点与原点之间的横向、纵向距离;
30、当所述幅度p大于预先配置的幅度阈值时,将所述横向、纵向距离确定为所述像素偏移量,当所述幅度p不大于预先配置的幅度阈值时,所述像素偏移量被确定为0。
31、本发明的另一方面还提供了一种电子设备,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上任一项所述的用于光电吊舱瞄准线稳定方法的步骤。
32、本发明的另一方面还提供了一种计算机存储介质,所述计算机存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上任一项所述的用于光电吊舱瞄准线稳定方法的步骤。
33、采用上述技术方案,本发明至少具有下列优点:
34、本发明提供的用于光电吊舱瞄准线稳定方法,可自动补偿光电吊舱的瞄准线漂移,实现瞄准线稳定,极大减少了人工操作量,可自动实现从粗调到精调的切换,提高了漂移补偿的速度和精度。采用基于频域互相关的图像偏移量检测算法计算陀螺漂移速度,算法效率高、准确度高,可达到像素级精度,不受陀螺数据噪声的影响。算法依据图像整体进行计算,不受图像中个别区域、个别目标变化的影响,因此稳定性强;对背景环境和成像效果的要求低,无需特意瞄准特定的目标即可实施,适用场景广泛;在惯性模式下实施,不依赖自动跟踪或其他工作模式。
- 还没有人留言评论。精彩留言会获得点赞!