基于最小二乘两步法的地磁矢量测量多源误差校正方法与流程
本发明属于地磁矢量测量,具体涉及一种基于最小二乘两步法的地磁矢量测量多源误差校正方法。
背景技术:
1、地磁场是地球固有的一种矢量场,进行地磁矢量场测量获得的信息更加丰富,其具有地磁标量测量不可比拟的优势。在进行移动式地磁矢量测量过程中,需要将地磁矢量测量系统搭载于测量载体之上(载体可以为测量船/艇、有人/无人飞机、拖体、auv等),通常地磁矢量测量系统包含三分量磁力仪、高精度惯导(姿态仪)、数据采集模块、gnss模块、数据存储模块等。在载体行进过程中,三分量磁力仪和高精度惯导分别测量不同点位的三分量磁场值和姿态角信息,然后根据姿态角信息对三分量磁场进行坐标旋转,可得到地理坐标系下的地磁矢量。
2、当前,用于三分量磁力测量的仪器主要为三轴磁通门传感器,受限于材料和加工工艺的限制,其存在零偏误差、标度系数误差、三轴非正交误差,这些误差会影响三轴磁通门传感器的测量精度。理想情况下,三分量磁力仪和姿态仪坐标系处于对准状态,可将三分量磁场准确地变换至地理坐标系下;在实际工程中,三分量磁力仪坐标系和姿态仪坐标系均不可视,单纯依靠机械安装的方式难以保证二者坐标系精确对准,即存在非对准误差;非对准误差会导致三分量磁场姿态坐标变换出现偏差,影响地理坐标系下矢量磁场的测量精度。通常的测量载体,在其动力装置、电气设备、载体结构中不可避免含有铁磁性材料,其会产生包含硬磁、感应磁场和涡流磁场的干扰磁场。
3、上述三轴磁通门传感器转向差、非对准误差、载体干扰磁场,会严重影响地磁矢量测量的精度,对这些误差和干扰磁场进行校正和补偿是移动式地磁矢量测量中的关键技术问题,众多学者开展了相关的研究。
4、在三轴磁通门传感器转向差校正方面,庞学亮等提出了基于遗传算法三轴磁传感器误差校正方法,首先构造目标函数,利用遗传算法求取目标函数的最优解,然后对测量数据进行校正,通过数值仿真表明,该方法可以稳定地收敛并可以达到很高的误差参数估计精度(庞学亮,林春生.基于遗传算法三轴磁传感器校正系数求解[j].探测与控制学报,2017,39(1):42-45,51.)。在非对准误差校正方面,庞鸿锋等人提出了一种基于绕轴法的地磁矢量系统非对准校正方法,该该方法要求将三轴磁传感器和加速度计封装在无磁正六面体中,将无磁正六面体放置在无磁转台上,分别绕无磁正六面体x轴和z轴旋转,分别计算出无磁正六面体到三轴磁传感器、加速度计的非对准角,然后确定三轴磁传感器和加速度计之间的坐标转换关系(庞鸿锋,张琦,万成彪等.基于绕轴法的地磁矢量系统非对准校正方法,专利申请号:201410740758.9)。在载体磁干扰补偿方面,刘继昊等人提出了一种载体磁干扰矢量补偿方法,该方法提出了一种改进的磁干扰参数判定准则,但在半实物仿真实验中,补偿后的分量误差仍高达千nt量级,其需要将三轴磁传感器、三轴陀螺仪安装在铝板上,且其假定二者坐标系对准,然后在无干扰源和有干扰源条件下完成测量,在实际载体测量条件下并不易实现(刘继昊,李夕海,张莹,等.一种通用的地磁测量中载体干扰矢量补尝方法[j].仪器仪表学报,2020,41(11):112-118.)。
5、上述方法均是对单项测量误差进行校正或补偿,在实际测量中如逐项误差进行校正和补偿,不仅程序复杂、可操作性较低,而且各项误差可能存在耦合关系,分别校正可能效果较差。在误差综合校正方面,张琦等提出了一种基于拉格朗日乘数法的地磁矢量测量系统误差校正方法,该方法借助无磁正六面箱体和无磁平台,建立包含磁传感器误差、非对准误差、软磁和硬磁的线性方程,利用磁总场约束的方法求解误差参数,实现误差校正(张琦,万成彪,潘孟春,基于拉格朗日乘数法的地磁矢量测量系统误差校正方法,专利申请号:cn201710067382.3)。李婷等提出了基于阻尼粒子群优化的地磁场测量误差补偿方法,首先建立了包含磁传感器误差和载体磁干扰得误差补偿模型,利用阻尼粒子群算法和总场约束的方法对模型参数进行估计,半实物试验表明可对磁总场误差取的较好的补偿效果(李婷,张金生,王仕成,等.基于阻尼粒子群优化的地磁场测量误差补偿[j].仪器仪表学报,2017,38(10):2446-2452)。
6、综上可知,现有地磁矢量测量误差校正和补偿还存在一些问题:1)针对单项误差开展校正补偿,不能实现多项误差的综合校正补偿,在实际中的应用效率和可操作性较低;2)利用磁总场作为误差参数计算的约束条件,其针对磁总场误差校正效果较好,但对地磁矢量误差校正效果较差;3)方法局限性较高,需要复杂的设备工装,在实际测量条件下难以开展应用。
7、本背景技术所公开的上述信息仅仅用于增加对本技术背景技术的理解,因此,其可能包括不构成本领域普通技术人员已知的现有技术。
技术实现思路
1、本发明针对现有技术中存在的上述问题,提供一种基于最小二乘两步法的地磁矢量测量多源误差校正方法。
2、为达到上述技术目的,本发明采用以下技术方案实现:一种基于最小二乘两步法的地磁矢量测量多源误差校正方法,所述方法为:
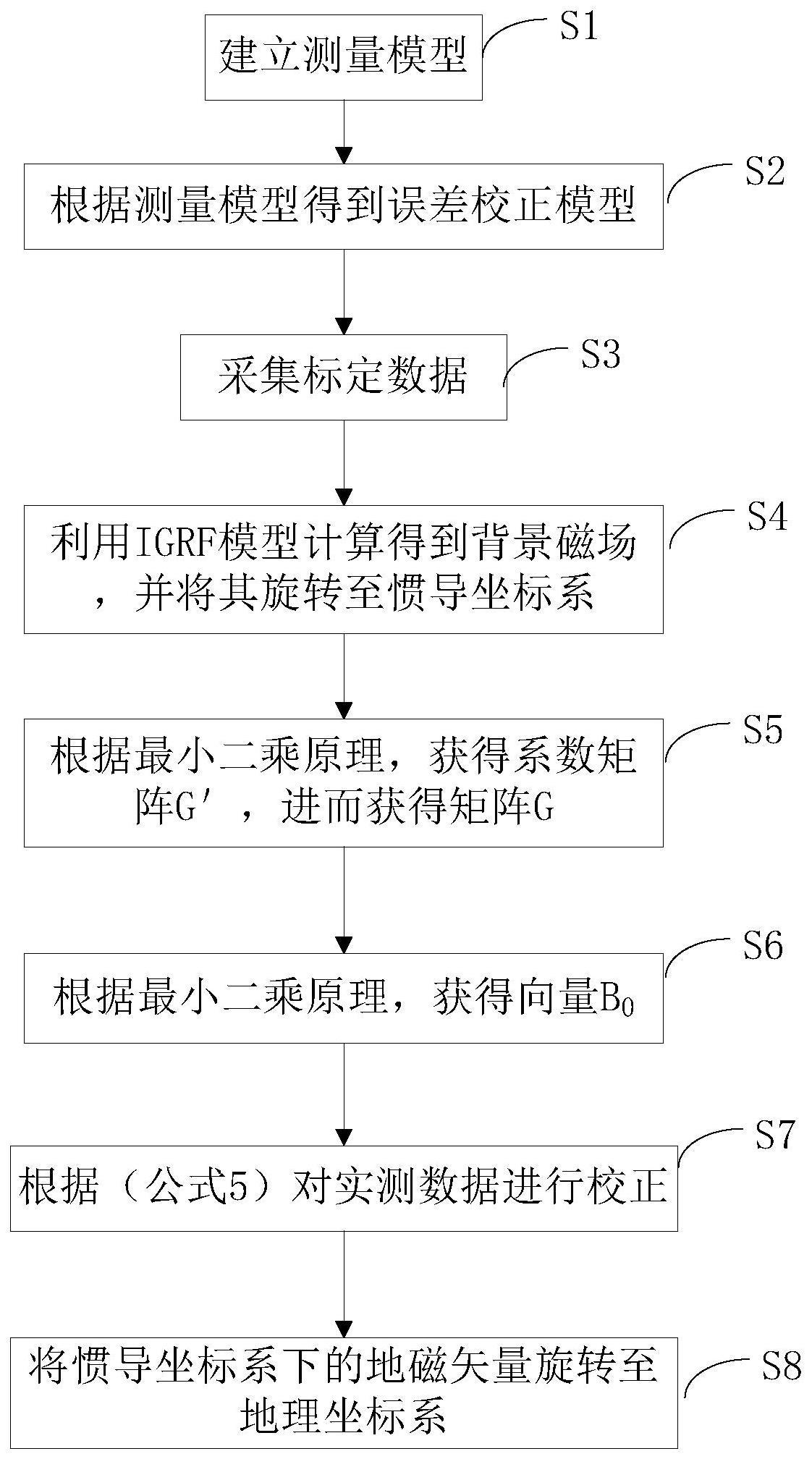
3、s1、建立测量模型:
4、bm=hbe+b0(公式2);
5、其中,h=kc(i+m),b0=kcbh+b0,i为单位矩阵,bm=[bmx,bmy,bmz]t为三轴磁通门传感器的输出值,be=[bex,bey,bez]t为地磁场在正交磁力仪坐标系下的投影矢量,为载体感应磁场系数矩阵,为三轴磁通门传感器非正交误差矩阵,α、β、γ为非正交角,为三轴磁通门传感器标度系数矩阵,bh=[bhx,bhy,bhz]t为载体硬磁在正交磁力仪坐标系下的投影,b0=[b0x,b0y,b0z]t为三轴磁通门传感器零偏误差向量;
6、s2、根据测量模型得到误差校正模型:
7、
8、其中,是惯导坐标系下的地磁投影矢量,是正交磁力仪坐标系至惯导坐标系的旋转矩阵,g为系数矩阵,b0为系数向量;
9、s3、采集标定数据;
10、s4、利用igrf模型计算得到背景磁场,并将其旋转至惯导坐标系;
11、利用igrf模型计算的地理坐标系下的地磁矢量值,来近似表示此处真实背景地磁场值;设利用igrf模型计算出的标定区域地理坐标系下的磁场矢量为根据标定过程中姿态仪输出的姿态角,对进行坐标旋转,可得到惯导坐标系下的磁场矢量:
12、其中,表示惯导坐标系下的地磁矢量,表示地理坐标系到惯导坐标系的转换矩阵,
13、r、p、h分别表示姿态仪输出的横滚角、俯仰角、航向角;
14、s5、采用地磁分量约束法,利用最小二乘获得系数矩阵g′,进而获得矩阵g:
15、令有
16、其中,系数矩阵g为3×3矩阵,向量b0为3×1矩阵,设得到:
17、其中,
18、由于采集多组标定数据:bm(i)、(i=1,2,…,n,n≥12),将(公式8)写为:
19、其中,根据最小二乘法原理,利用(公式9)获得g′的最佳估计;
20、获得系数矩阵g;
21、s6、根据最小二乘原理,获得向量b0:
22、令g4=[g14,g24,g34]t,其为已知量,根据(公式8),得到gb0=g4(公式11);
23、根据最小二乘法原理获得b0的估计值;
24、s7、根据(公式5)计算惯导坐标系下的地磁矢量
25、s8、将惯导坐标系下的地磁矢量旋转至地理坐标系:
26、根据姿态仪输出的姿态角对进行坐标旋转,得到地理坐标系下地磁矢量
27、其中,是从惯导坐标系到地理坐标系的旋转矩阵:
28、
29、如上所述的基于最小二乘两步法的地磁矢量测量多源误差校正方法,地磁矢量测量系统安装至移动载体后,载体坐标系与姿态仪坐标系一致。
30、如上所述的基于最小二乘两步法的地磁矢量测量多源误差校正方法,所述方法建立了包含三轴磁通门传感器误差、非对准误差、软磁和硬磁干扰的误差校正模型。
31、如上所述的基于最小二乘两步法的地磁矢量测量多源误差校正方法,采集标定数据的方法为:测区附近选择一个地磁梯度低于设定值、周围磁干扰小于设定值的开阔区域,选择靠近该区域中心的某一点,以该点为中心,令载体进行机动航行采集标定数据。
32、如上所述的基于最小二乘两步法的地磁矢量测量多源误差校正方法,所述机动方式为:以所选点为中心,分别令载体以测量航速和最小转弯半径绕该点做顺时针和逆时针航行,各旋转一圈。
33、如上所述的基于最小二乘两步法的地磁矢量测量多源误差校正方法,所述机动方式为:以所选点为中心,令载体做“十”字往返航行。
34、如上所述的基于最小二乘两步法的地磁矢量测量多源误差校正方法,所述“十”字每条边长度为20倍载体长度。
35、与现有技术相比,本发明的优点和积极效果是:本发明基于最小二乘两步法的地磁矢量测量多源误差校正方法,首先建立包含三轴磁通门传感器误差、非对准误差、软磁和硬磁的误差综合补偿模型,然后令测量载体按照一定的动作航行采集标定数据,采用地磁分量约束法,利用两步最小二乘算计算出各项补偿参数,最后对实测数据进行补偿。本发明可对上述各项误差进行综合补偿,不需要其它辅助设备、操作简单、计算速度快,可在实际移动式地磁矢量测量条件下开展应用。本发明可对地磁矢量测量中的三分量磁力仪误差、非对准误差、载体磁场干扰实现快速校正补偿。
- 还没有人留言评论。精彩留言会获得点赞!