一种基于多点云融合的桥梁服役线形识别方法
本发明属于桥梁工程桥梁服役期外观检测,具体涉一种基于多点云融合的桥梁服役线形识别方法。
背景技术:
1、桥梁服役线形是桥梁服役期外观检测的一种重要评价指标,反映了当前状态下桥梁对于不同荷载效应的力学响应,线形严重偏离原始设计线形的桥梁可能已经处于不良的运营状态。因此识别桥梁主梁线形是桥梁外观检测的关键内容之一。常规的检测手段如全站仪、水准仪、gps等效率较低,且只能获取有限数量的单点信息,无法实现对桥梁空间信息的完整获取。三维点云数据是一种海量点的集合,它包含了物体表面完整的三维坐标信息。然而桥梁主梁在实际运营过程中受到荷载作用处于复杂振动状态,且该振动效应会随着桥梁跨径的增大而增强,这导致了获取的点云数据存在复杂振动噪声。如何精确地从带有噪声的点云数据中识别能反映桥梁真实运营状态的桥梁服役线形,亟待解决。
技术实现思路
1、本发明的目的在于:提出一种基于多点云融合的桥梁服役线形识别方法,精确地从带有噪声的点云数据中识别能反映桥梁真实运营状态的桥梁服役线形。
2、为实现上述目的,本发明提供如下技术方案:一种基于多点云融合的桥梁服役线形识别方法,包括如下步骤:
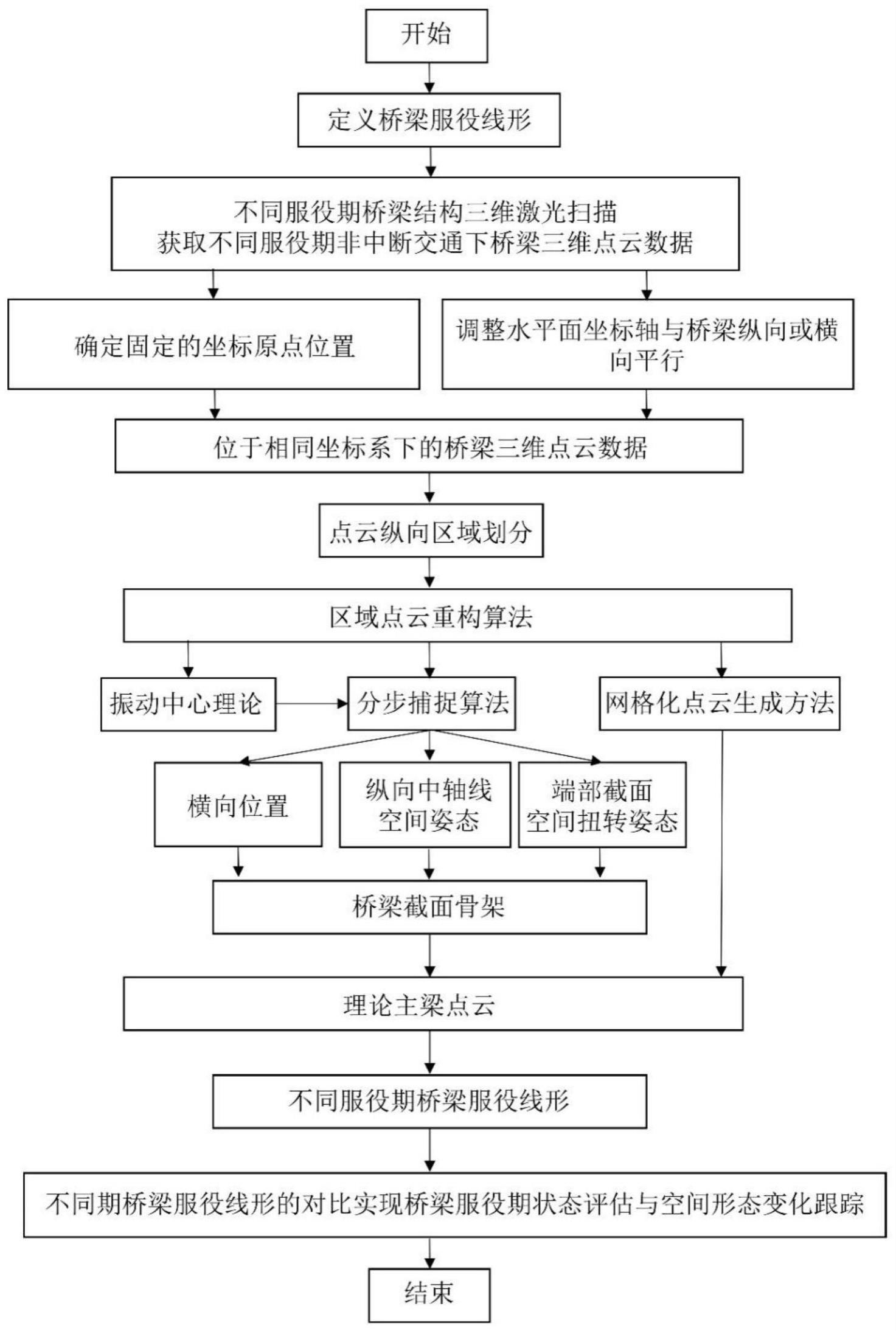
3、s1、定义待测桥梁服役线形:在理论主梁点云中任意目标横向位置上沿跨径延伸方向提取所有点三维坐标,构建桥梁主梁线形;
4、s2、在不同服役期对桥梁结构进行多次三维激光扫描,获得不同服役期非中断交通下桥梁主梁的多点云数据,并将多点云数据转换到同一目标坐标系下;
5、s3、利用区域点云重构算法将步骤s2得到的桥梁主梁多点云数据进行融合,得到桥梁真实空间形态且连续平滑的理论主梁点云;
6、s4、将步骤s3中得到的理论主梁点云任意目标横向位置上沿跨径延伸方向提取的所有点三维坐标,即为识别得到的待测桥梁服役线形。
7、进一步地,前述的步骤s2包括以下子步骤:
8、s201、针对不同服役期,在同一测站连续对目标桥梁进行n次三维激光扫描,并结合气温对待测桥梁服役线形进行修正;
9、s202、将多点云数据转换至同一目标坐标系:目标坐标系中两个水平面坐标轴平行于桥梁纵向或横向。
10、进一步地,前述的步骤s3包括以下子步骤:
11、s301、将n次扫描得到的n个主梁点云分别沿桥梁纵向等间隔划分为m=lz/lp个纵向区域,其中,lz为桥梁跨径,lp为纵向区域沿桥梁纵向的长度;分别对每个纵向区域内的点利用区域点云重构算法进行区域多点云融合;
12、s302、对于所有n次扫描的点云数据中第j个纵向区域:l1j,l2j...lnj,j∈{1,2...m},分别取其范围内的所有点作为算法输入点集pj;且相邻两个纵向区域的截面连接处为各自范围内所有点的并集;
13、s303、分别对每个纵向区域内的点利用区域点云重构算法进行区域多点云融合,包括三个主梁关键参数的计算:横向位置、纵向中轴线空间姿态、端部截面空间扭转姿态,得到每个区域的理论主梁点云,形成包含多主梁截面的桥梁截面骨架;
14、s304、根据步骤s303得到的桥梁截面骨架,利用网格化点云生成方法得到桥梁真实空间形态且连续平滑的理论主梁点云。
15、进一步地,前述的步骤s303包括以下子步骤:
16、s303-1、建立振动中心理论:桥梁任意一个位置或部分bb在每一次被扫描仪捕获形成点云中的空间坐标点或点集pb时,pb距离bb更近的概率总大于pb距离bb更远的概率,即桥梁及其部分总位于其对应点云的振动中心位置;
17、s303-2、基于振动中心理论,使用分步捕捉算法确定纵向区域主梁的横向位置:
18、构造长度为lp,宽度为主梁设计宽度d的水平面矩形搜索框,计算点云实际最大横向宽度为dm,提取点集pj中所有点的纵向和横向坐标形成平面二维点集以距离ζ横向移动搜索框,且移动过程中保证搜索框与纵向区域在纵向上的长度对齐和方向平行,记录第h步移动后框内点数量nh,且ζ≤(dm-d)/10,当nh同时满足:
19、nh>nh-1,nh-2,nh+1,nh+2 (1)
20、确定位于框内点数量最多的搜索框位置即为主梁横向位置;
21、s303-3、基于振动中心理论,计算纵向区域理论主梁点云的纵向中轴线空间姿态:
22、基于纵向区域内主梁纵向中轴线即为主梁纵向等分线,以及步骤s303-2中主梁横向位置己确定,根据主梁设计宽度d提取点集pj中主梁纵向等分线上所有点的纵向坐标与竖直坐标形成二维点集
23、所述点集中的点构成一个具有纵向长度和竖向高度的类四边形区域;该区域内最大竖向高度记为hmax;根据振动中心理论,确定一条斜率为k的直线lk,以距离ηk在竖直方向上下移动该直线,扫略到的点数量nk都大于任意其他斜率直线lq以相同方式移动扫略得到的点数量nq,lk即为确定的纵向中轴线;
24、使用分步捕捉算法确定纵向中轴线lk的空间姿态:创建一个竖直高度为ω,纵向长度无限大且初始斜率k=0的矩形捕捉区域rb,规定ω≤hmaxy10;自上而下以距离步长ε移动rb;rb初始位置记为π0,第i步移动后rb位置记为πi;记录第i步移动后点集中的点位于rb内的点数量ni,规定ε≤ω/5;当ni同时满足:
25、ni>ni-1,ni-2,ni+1,ni+2 (2)
26、时,以此时rb位置为基准,进一步确定纵向中轴线的竖直倾角;
27、记此时rb经过点集的部分为rbp;以rbp中心点位置为基准,以角度步长δk顺时针或逆时针旋转rb;记录初始位置rb内点数量为nc,顺时针第j次旋转后点集中的点位于rb内的点数量为逆时针第j次旋转后点集中的点位于rb内的点数量为令δk≤π/360;当:
28、
29、时,后续仅以顺时针方向旋转rb;当:
30、nj>nj-1,nj-2,nj+1,nj+2 (4)
31、时,此时rbp的竖向二等分线即为所求的该纵向区域纵向中轴线空间姿态。
32、当:
33、
34、时,后续仅以顺时针方向旋转rb;当:
35、nj>nj-1,nj-2,nj+1,nj+2 (6)时,此时rbp的竖向二等分线即为所求的该纵向区域纵向中轴线空间姿态;
36、s303-4、基于振动中心理论,计算该纵向区域理论主梁点云的端部截面空间扭转姿态:分别提取点集pj中主梁两端截面上所有点的纵向坐标与竖直坐标形成二维点集和
37、根据s302中所述相邻两个纵向区域的截面连接处应共享点集,因此除第一个纵向区域起点截面和最后一个纵向区域的终点截面外,其他所有截面的取点方式应同时取到相邻两个截面的点,具体为:取点时,设定前一个纵向区域终点截面和后一个纵向区域起点截面的宽度都为dj/2,将取到的点的并集作为这两个相邻纵向区域连接处截面的二维点集,即:
38、
39、其中,为第j个纵向区域终点截面点集,为第j+1个纵向区域起点截面点集;
40、基于s303-2中纵向区域纵向中轴线空间姿态已经确定,利用截面点集结合分步捕捉算法确定端部截面的扭转姿态:创建一个长度尺寸与设计截面相同的截面线段并赋予其一定的厚度τ,该截面线段即为捕捉区域为rd,规定τ≤hmax/10,hmax为范围内最大竖向高度;分别将纵向区域两个截面线段以水平姿态放置于对应纵向中轴线端点位置,令每个截面线段中点位于纵向中轴线对应端点上;
41、记此时rd经过点集的部分为rdp;以rbp中心点位置为基准,以角度步长δd顺时针或逆时针旋转rd;记录初始位置rd内点数量为nc,顺时针第j次旋转后点集和的点位于rd内的点数量为s代表顺时针,逆时针第j次旋转后点集中的点位于rd内的点数量为n代表逆时针,规定δd≤π/360;当:
42、
43、时,后续仅以顺时针方向旋转rb;当:
44、nj>nj-1,nj-2,nj+1,nj+2 (9)
45、时,此时rd的扭转姿态即为所求的该截面空间扭转姿态;
46、当:
47、
48、时,后续仅以顺时针方向旋转rb;当:
49、nj>nj-1,nj-2,nj+1,nj+2 (11)
50、时,此时rd的扭转姿态即为所求的该截面空间扭转姿态。
51、进一步地,前述的步骤s304中,利用网格化点云生成方法生成满足目标点云密度要求的理论主梁点云的过程包括以下子步骤:
52、s304-1、将桥梁截面骨架中主梁截面所有对应角点依次以纵向连接直线连接,形成各纵向区域中主梁不同部分的空间区域;
53、s304-2、记目标点云密度不小于q,对各空间区域中所有线段和所有纵向连接直线以q为长度进行划分,依次连接相邻两个主梁截面上对应分割点和梁截面之间纵向连接直线对应分割点,最终形成点云网格;
54、s304-3、在每个点云网格中随机位置生成至少一个点坐标,所有生成点坐标集合即为得到的反映桥梁真实空间形态且连续平滑的理论主梁点云。
55、进一步地,前述的步骤s301中,lp≤lz/100。
56、进一步地,前述的步骤s201中,所述进行n次三维激光扫描时,n大于等于5;并且扫描时任意两次扫描时的气温差值小于3摄氏度;不同服役期的桥梁点云数据对应的扫描时段和气温条件一致;当不同服役期的其中两次扫描的气温差值大于预设气温差值阈值时,结合两次扫描时的实际气温对桥梁服役线形进行修正。
57、进一步地,前述的步骤s303-3中,所述根据主梁设计宽度d提取点集pj中主梁纵向等分线上所有点的纵向坐标与竖直坐标形成二维点集取点时令纵向等分线具有一定横向宽度:取点时纵向等分线宽度不超过db/50,其中db为主梁底板的设计宽度。
58、进一步地,前述的步骤s303-4中,所述分别提取点集pj中主梁两端截面上所有点的纵向坐标与竖直坐标形成二维点集和在取点时设定的截面厚度dj不超过lp/100。
59、相较于现有技术,本发明的有益效果为:本发明的基于多点云融合的桥梁服役线形识别方法,确定了桥梁服役线形的明确定义,利用多次三维激光扫描获取的桥梁多点云数据,基于坐标转换基线的坐标系调整和基于高斯过程算法的多点云融合回归预测,实现了桥梁服役线形的精确识别,解决了传统测量方法对空间信息获取不足的问题,并针对桥梁振动引起的点云数据复杂振动噪声难题,实现了具有高置信度的桥梁服役线形识别,提高了对桥梁服役状态把控的准确性。
- 还没有人留言评论。精彩留言会获得点赞!