基于SINS/LDV组合的连续高程测量方法及系统
本发明涉及一种基于捷联惯导系统(strapdown inertial navigation system,sins)/激光多普勒测速仪(laser doppler velocimeter,ldv,通常简称测速仪)组合的连续高程测量方法及系统,属于大地测量领域。
背景技术:
1、高程测量在地质勘探、地形绘制、重力测量等方面具有重要作用。在野外进行作业时,通常需要进行连续高程测量,而目前的高程测量方法如几何水准测量、三角高程测量等方式无法实现连续高程测量,全球卫星导航系统(global navigation satellite system,gnss)虽然可以实现连续高程测量,但是在丛林、山谷以及高楼密集的环境中gnss信号较差导致测量精度急剧下降。
2、为了实现全自主式连续高程测量,可以采用惯导系统与激光多普勒测速仪组合进行测量,惯导系统可以选用旋转惯导系统或捷联惯导系统,两套系统与激光多普勒测速仪组合的高程测量都可以避免环境的影响。其中旋转惯导系统/激光多普勒测速仪组合连续高程测量对惯导系统的陀螺和加速度计精度要求较低,同时存在以下问题:
3、第一:旋转惯导系统中包含转位机构,增加了惯导系统设计和安装的复杂度,同时也增加了测量系统的不稳定性;
4、第二:转位机构在安装时存在水平倾角,其补偿过程增加了测量方法的复杂度。
5、因此,可以采用包含更高精度陀螺和加速度计的捷联惯导系统/激光多普勒测速仪组合的方式进行连续高程测量,一方面降低了系统设计和测量方法的复杂度,另一方面又提高了测量方法的精度。
技术实现思路
1、针对当前连续高程测量方法的缺陷,本发明的目的是提出一种基于sins/ldv组合的连续高程测量方法及系统。
2、为了实现上述技术目的,本发明的技术方案如下:
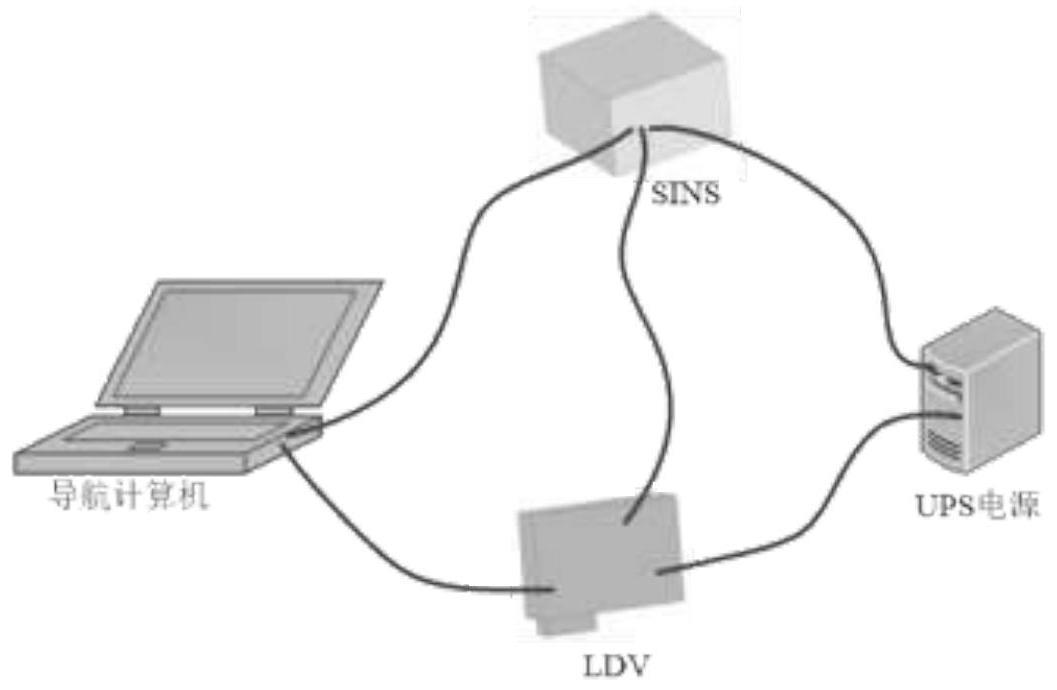
3、一种基于sins/ldv组合的连续高程测量方法,基于由捷联惯导系统、激光多普勒测速仪、ups电源以及导航计算机组成的连续高程测量系统,该方法分为以下步骤:
4、s1:将捷联惯导系统分别与激光多普勒测速仪和导航计算机连接;
5、将激光多普勒测速仪与导航计算机连接,同时将ups电源分别与捷联惯导系统和激光多普勒测速仪连接;
6、s2:在将搭建好的系统安装于载体(例如实验车)时,由于安装误差的存在,测速仪坐标系m系与载体坐标系b系之间不能完全重合,需要对其进行标定;其中影响激光多普勒测速仪速度投影的安装误差有测速仪坐标系m系与载体坐标系b系之间的俯仰安装角误差θ、航向安装角误差ψ以及比例因子k,其标定方法如下:
7、s2.1:打开激光多普勒测速仪和捷联惯导系统进行数据采样;
8、s2.2:首先设θ=0、ψ=0以及k=1,起点处地标点a的坐标为(xa,ya,za);
9、s2.3:经过1~2min直线运动后载体行驶到地标点b,其坐标为(xb,yb,zb),点a到点b位移大小为l1;
10、激光多普勒测速仪经航迹推算后的位置为点c,其坐标为(xc,yc,zc),点a到点c位移大小为l2,具体航迹推算方法参见参考文献《one-dimensional reference-beam ldvfor accurate altitude estimation in a land vehicle》(rong huang,qi wang,xiaoming nie,et al,《applied optics》,2020.11);
11、则标定的结果为:
12、
13、s2.4:通过标定后的俯仰安装角误差θ、航向安装角误差ψ计算得到测速仪坐标系m系和载体坐标系b系之间的安装误差矩阵
14、
15、通过计算的测速仪坐标系m系和载体坐标系b系之间的安装误差矩阵以及比例因子k,得到某一导航时刻激光多普勒测速仪速度在b系下的投影:
16、
17、式中,l为导航信息的更新迭代时刻,为某一导航时刻激光多普勒测速仪测量的速度在测速仪坐标系m系下投影,由激光多普勒测速仪提供。
18、s3:完成系统的安装和激光多普勒测速仪安装误差标定后,接着进入高程测量;
19、进入高程测量后,导航计算机对测量过程中捷联惯导系统的输出进行姿态解算,得到载体坐标系b系与导航坐标系n系之间实时的3×3姿态矩阵
20、通过实时姿态矩阵进一步得到某一导航时刻测速仪速度在导航坐标系n系下的投影
21、
22、惯导系统由于天向无阻尼会导致系统误差迅速发散,实时姿态矩阵的误差也会迅速增大,因此测速仪速度的误差也会增大;
23、为了得到稳定的高精度实时姿态矩阵必须借助激光多普勒测速仪对惯导系统的天向进行阻尼,通常选择卡尔曼滤波器进行不同传感器之间的信息融合并对系统误差进行估计与反馈,从而抑制惯导系统误差的发散,卡尔曼滤波器的构建步骤参见参考文献《基于二维激光多普勒测速仪的车载组合导航系统》(陈红江,聂晓明,王梦成,《红外与激光工程》,2018.12);
24、至此可以稳定输出高精度的实时姿态矩阵
25、s4:将(4)式展开,某一导航时刻激光多普勒测速仪速度在导航坐标系n系下各个方向上的投影为:
26、
27、上式中,ve_ldv(l)、vn_ldv(l)、vu_ldv(l)为某一导航时刻激光多普勒测速仪在导航坐标系n系的东、北、天三个方向上的速度投影,为某一导航时刻激光多普勒测速仪在载体坐标系b系的x、y、z轴三个方向上的速度投影;
28、将激光多普勒测速仪速度进行如下计算,得到任意导航时刻载体的位置信息:
29、
30、上式中,t为激光多普勒测速仪的速度更新周期,l(l)、λ(l)、h(l)分别为某一导航时刻航迹推算得到的载体的纬度、经度和高程信息,l(l-1)、λ(l-1)、h(l-1)分别为上一导航时刻航迹推算得到的载体的纬度、经度和高程信息,其中起始点位置l0、λ0、h0由地标点给出,re、rn分别为载体所在位置的卯酉圈半径和子午圈半径;
31、最后,经过(6)式中第三式,可以连续测得载体行驶过程中的高程信息。
32、本发明还提供一种基于上述方法的连续高程测量系统,包括捷联惯导系统(strapdown inertial navigation system,sins)、激光多普勒测速仪、ups电源以及导航计算机,其中,捷联惯导系统用于敏感载体的角运动和线运动;捷联惯导系统分别与激光多普勒测速仪和导航计算机连接;激光多普勒测速仪与导航计算机连接,ups电源分别与捷联惯导系统和激光多普勒测速仪连接;为了提高高程测量精度,以捷联惯导系统的脉冲输出为基准去触发激光多普勒测速仪的输出,预防捷联惯导系统与激光多普勒测速仪内部晶振不一致导致的数据丢失现象。
33、为了降低系统设计复杂度,采用基于固态探测体的激光多普勒测速仪,不需要人为掺杂示踪粒子,而是利用探测体表面的自然颗粒。
34、与现有技术相比,本发明的优点在于:
35、1.本发明对高程测量方法及系统进行了简化,提高了高程测量效率;
36、2.本发明的高程测量方法完全不依赖gnss信号,属于全自主式连续高程测量,在密林、山谷以及极端天气等环境中仍可保持较高的连续高程测量精度,极大地提高了连续高程测量的环境适应能力;
37、3.为了防止晶振不一致导致捷联惯导系统和激光多普勒测速仪的数据采集频率不完全一致,以捷联惯导系统的脉冲输出去触发激光多普勒测速仪的输出,进一步提高了连续高程测量的精度。
- 还没有人留言评论。精彩留言会获得点赞!